用于形成双平面截骨的系统和方法与流程
用于形成双平面截骨的系统和方法
1.相关申请的交叉引用
2.本技术要求2020年1月29日提交的临时专利申请第62/967,252号,2020年7月21日提交的临时专利申请第63/054,561号,以及2020年10月30日提交的临时专利申请第63/108,238号的权益,所有临时专利申请的标题均为“systems and method for forming biplanar osteotomies(用于形成双平面截骨的系统和方法)”;所述临时专利申请以全文引用的方式并入本文中。
3.本技术通过引用并入2020年2月20日提交的共同拥有的专利申请第pct/us20/019094号;以及2019年2月20日提交的临时专利申请第62/808129号,两者的标题均为“system and method for high tibial osteotomy(用于胫骨高位截骨的系统和方法)”。
技术领域
4.本发明大体上涉及手术设备和方法,并且更具体地涉及用于形成双平面截骨以重新对准骨的设备和方法。
背景技术:
5.下肢的截骨是用于改变膝盖的承重几何形状的重要技术。例如,胫骨截骨可以通过调节膝关节的几何形状以将承重负荷从关节的关节炎部分转移到关节的相对未受影响的部分来治疗膝盖关节炎。作为另一示例,胫骨或股骨截骨可以解决异常的膝盖几何形状,例如由于先天性缺陷、损伤等。大多数下肢截骨被设计成调节负荷通过膝关节转移的方式。调节胫骨的取向的一种方法是图1b中所示的开放楔形技术,其中切口切入胫骨的上部部分,从而形成由骨铰链81连接的两段胫骨。然后操纵胫骨以使两个段分离,并打开骨中的楔形开口,然后(例如,通过将金属板拧到骨上或通过将楔形植入物插入骨中的开口)将骨固定在该位置,由此相对于胫骨平台重新定向胫骨的下部部分,并且因此调节负荷从股骨转移到胫骨的方式。图1b示出了与股骨70与胫骨80之间的膝关节75相关联的示例性开放楔形胫骨高位截骨。图1b是前-后视图。可以相对于膝关节75的第一参考轴线a以选定角度β制作平面切口90。这是部分切口,即不是穿透切口,并且可以从平面切口90与胫骨80的外表面的交点处的外表面边界92延伸到图1b中以距离l示出的选定切割深度处的第二边界94。第二边界94用作铰链轴线(也用数字94表示),用于打开切口90的第一相对面96与第二相对面98之间的楔形角γ,如图1c中的箭头c所示。第一边界92和第二边界94的位置、平面切口90相对于参考轴线a的角度β以及楔形角γ可以在术前规划阶段期间确定,以矫正特定患者的病症。通常,这些都确定为使得平面切口90仅沿着冠状面延伸,其中第二边界(94)限定基本上平行于矢状面的前-后线。通常,这些都是根据单平面矫正确定的,在此情况下是冠状矫正角。然而,有时胫骨平台的前-后倾斜可能需要例如在矢状面中倾斜(参考图1a),以进一步有助于acl或pcl病症。因此,这需要将两个基本正交的矫正相互叠加,下文定义为双平面矫正(图2a中所示)。这可能导致剩余骨铰链81扭转,其可能开裂100(图2a和2b)。返回参考图1c,该图示出了类似于图2a的左侧的单矫正平面截骨,为了适应额外矢状面矫正,第一相对
面96和第二相对面98中的至少一个现在必须相对于彼此旋转,使得开口角γ从前侧到后侧变化。一些尝试的解决方案已尝试在切口的顶点或边界94处添加应力消除孔,以最小化任何裂纹的传播,但这尚未充分解决对程序的需要,并且仍然可能发生开裂。如果检测到裂纹,则其它尝试的解决方案是更保守的修复机制。然而,这需要额外的术后随访和护理。因此,需要提供一种用于控制骨铰链上的应力同时矫正两个骨段的对准从而适应双平面矫正的改进的方法和系统。
附图说明
6.对于示例性实施例的详细描述,现在将参考附图,其中:
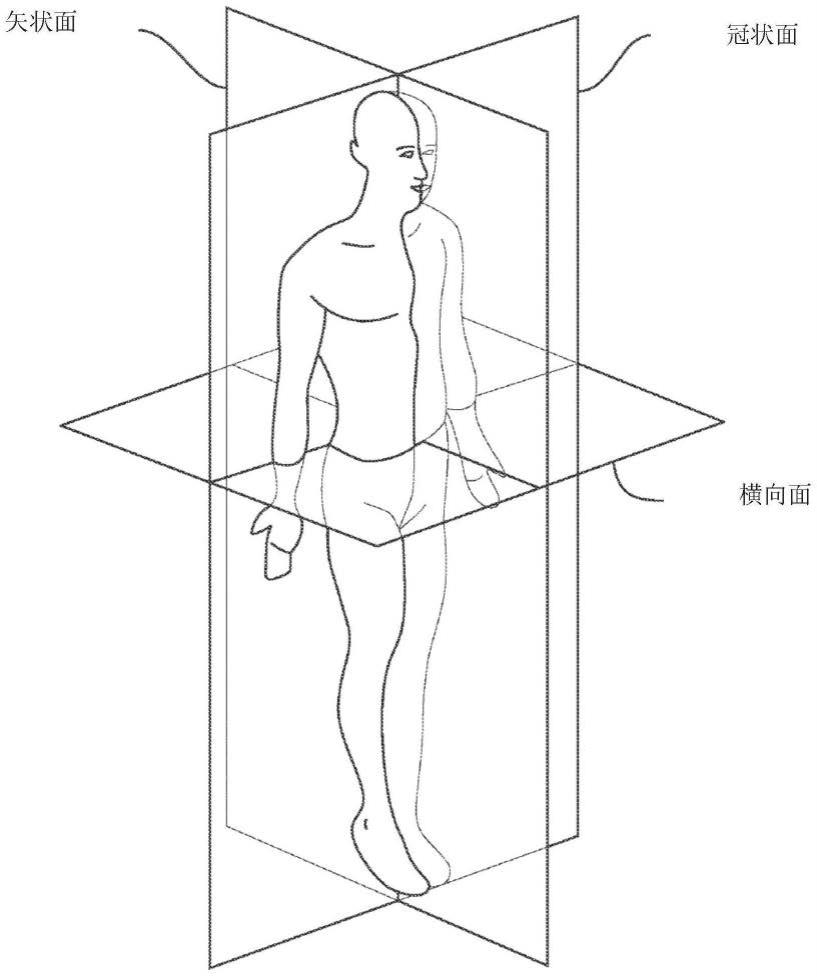
7.图1a出于参考目的示出限定穿过身体的平面的身体;
8.图1b出于参考目的仅示出冠状面中的胫骨截骨;
9.图1c出于参考目的仅示出冠状面中牵开的胫骨截骨;
10.图1d出于参考目的仅示出冠状面中的股骨截骨开放和闭合楔形;
11.图2a表示双平面矫正的可能结果,其中骨铰链轴线或边界平行于矢状面定向,因此仅适应单平面;
12.图2b出于参考目的示出具有在扭转开口以适应第二正交矫正时形成的裂纹的骨铰链;
13.图3a和3b表示分别包括膝关节的前-后视图(左)和矢状视图(右)图像的x射线图像;
14.图4a表示根据本公开的用于计算经调整的铰链轴线的模型;
15.图4b用图形表示根据本公开的内翻角、ap角和所得的经调整的铰链轴线;
16.图4c和4d示意性地表示根据本公开的胫骨的一些示例性经调整的铰链轴线角;
17.图5a和5b示意性地表示根据本公开的胫骨的一些示例性经调整的铰链轴线角;
18.图6a-6c示意性地表示根据本公开的用于在胫骨上执行开放楔形双平面截骨的示例性方法和系统;
19.图7a-7f示意性地表示根据本公开的用于在股骨上执行闭合楔形双平面截骨的示例方法和系统;
20.图8a-8e示出了根据本公开的用于以目标修改角度穿过骨放置铰链销的瞄准器组件及其部件;
21.图9示出了根据本公开的前切割引导件;
22.图10a-10f示出了根据本公开的骨撑开器的各种视图;
23.图11a-11c示出了根据本公开的替代骨撑开器实施例的各种视图;
24.图12a-12d示出了根据本公开的具有复杂孔口的骨板的各种视图;
25.图13a-13c示出了根据本公开的具有修改的铰链轴线角的骨铰链和所得优选板位置上的扭矩;
26.图14a-14b示出了根据本公开的具有复杂孔口的骨板的替代实施例,所述骨板被构造成放置在减少骨铰链上的扭矩的位置处;
27.图15a-15e示出了根据本公开的骨板的替代实施例,所述骨板被构造成减少由于修改铰链轴线角引起的胫骨上的扭转力矩;
28.图16a-16d示出了根据本公开的用于调节骨铰链上的压缩的系统;
29.图17a-17c示出了使用外部压缩工具压缩骨铰链的方法;以及
30.图18a-18c示出了伴随胫骨的开放楔形截骨的板和acl修复或重建的方法。
技术实现要素:
31.各种术语用于指代特定的系统部件。不同的公司可能用不同的名称来指代一个部件-本文不旨在区分名称不同但功能相同的部件。在以下讨论和权利要求中,术语“包括”和“包含”以开放式方式使用,因此应解释为“包括但不限于
…”
。此外,术语“联接”或“耦合”旨在表示间接或直接连接。因此,如果第一装置联接到第二装置,则该连接可通过直接连接或通过经由其它装置和连接的间接连接。
32.通常,本公开涉及骨的重新对准(这可以包括在骨中形成可以是开放楔形的楔形),膝盖的胫骨截骨,并且旨在提供具有预定或计算的顶点的切口。此预定顶点或边界限定在打开截骨时的旋转轴线,所述轴线确定为包括冠状矫正和矢状矫正两者。虽然现有方法包括形成仅考虑单平面矫正的截骨90,但如参考图1b-1d所论述的,本公开修改了骨铰链边界或轴线以包括围绕骨的纵向轴线a-a的旋转角θ,所述旋转角可计算或确定为适应相互叠加的两个正交矫正平面,下文称为“双平面矫正”或“双平面截骨”。两个正交平面包括矢状面和冠状面两者中的非零矫正。此旋转角θ可以限定所得铰链轴线角或取向,以下称为“修改的铰链轴线”角。与形成仅考虑单平面矫正(例如仅冠状面)的截骨然后扭转截骨以适应第二平面矫正的方法相比,此方法避免或减少对骨铰链的扭转的需要。这可以减轻对骨铰链的弱化,对骨铰链产生集中应力或使骨铰链开裂。双平面矫正可包括形成单平面截骨,所述单平面以适应两个正交平面矫正的角度定向。本发明还可涉及利用类似原理的闭合楔形胫骨截骨。例如,在图1d中,可针对股骨70的截骨实施本发明。可以针对任何骨的闭合楔形截骨实施本发明。在图1d中示出了骨可以作为边界94、95和96之间的楔形被移除,并且骨旋转(参见箭头)到闭合或邻接位置。本发明确定边界的改进取向。可以针对任何骨上的任何截骨实施本发明,其中需要两个非零的基本正交的叠加矫正角。
33.各种实施例涉及将第一骨段相对于第二骨段附接的手术方法,两个段属于同一骨。所述方法可包括部分地切割骨以将所述骨分成由骨铰链连接在一起的两个骨段,以及使两个骨段围绕骨铰链牵开或旋转,其中所述骨铰链被构造成使两个骨段围绕骨铰链的单个自由度旋转,并且适应两个基本正交矫正平面。如图2a中所示扭转骨铰链使骨段以至少两个自由度牵开或旋转。在一些实施例中,所述方法可以包括确定两个骨段的相对三维位置以获得两个骨段的最终期望对准以及确定骨铰链的取向和位置的术前步骤,所述相对三维位置包括两个基本正交矫正平面。在一些实施例中,两个基本正交平面包括矢状面和冠状面。在一些实施例中,确定铰链的取向和位置包括使用查找表。在一些实施例中,确定铰链的取向和位置包括使用计算机程序。在其它实施例中,确定铰链的取向和位置包括使用机械计算机,其中两个角度可输入到机械结构体中,所述机械结构经由凸轮和连杆机械地解析旋转和楔形角。在一些实施例中,在确定骨铰链的取向和位置之后,所述方法可以包括在确定的取向和位置处穿过骨钻孔以形成铰链轴线。在一些实施例中,确定骨铰链的取向和位置包括确定铰链轴线相对于骨的竖直平面或矢状面围绕骨的纵向轴线的旋转角(θ)。所述方法可以包括确定两个骨段的相对三维位置以获得两个骨段的最终期望对准以及确
定最终楔形开口角的术前步骤,所述相对三维位置包括两个基本正交矫正平面。所述方法可包括使用查找表或计算机程序确定最终楔形开口角。所述方法可包括使两个骨段旋转到最终楔形开口角。
34.公开了一种用于将第一骨段相对于第二骨段附接的替代手术方法,两个段属于同一骨。该方法包括部分地切割到骨中,执行切割直到获得部分切口,所述部分切口将骨部分地分成由骨铰链连接在一起的两个骨段,所述骨铰链限定相对于通过骨的矢状面以非零角度定向的铰链轴线。该方法还包括使第一骨段相对于第二骨段围绕所述骨铰链围绕单个自由度旋转,直到获得两个骨段的期望三维对准(包括如本文限定的双平面矫正),以及到达所述骨段的面对侧彼此分开预定开口角的位置。在一些实施例中,所述方法还可以包括使用目标内翻矫正角输入和目标前-后倾斜矫正角输入来确定相对于矢状面的铰链旋转角,因此限定提供第一骨段相对于第二骨段围绕单个自由度的旋转的铰链轴线角。在一些实施例中,所述方法可包括使用物理图表确定铰链旋转角(θ)。在一些实施例中,所述方法可包括使用计算机程序确定铰链旋转角(θ)。在一些实施例中,所述方法可包括钻孔,因此产生骨铰链轴线。在一些实施例中,所述方法可包括使用预规划导航钻孔。在一些实施例中,可以使用计算机引导机器人钻孔,所述计算机引导机器人的工作头能够根据至少三个自由度移动。在一些实施例中,所述方法可包括通过使用计算机引导机器人来实施切割骨,所述计算机引导机器人的工作头能够根据至少三个自由度移动,所述工作头支撑切割工具。在一些实施例中,所述方法可包括使用切割引导件引导切割工具的取向。
35.公开了一种控制计算机引导机器人以便实施将第一骨段相对于第二骨段附接的手术方法的另一方法,所述计算机引导机器人具有可根据至少三个自由度移动的工作头,两个段属于同一骨。当切割工具联接到工作头时,该方法包括使切割工具部分地切割骨直到获得部分切口,所述部分切口将骨部分地分成由骨铰链连接在一起的两个骨段,骨铰链限定单个铰链轴线。该方法还包括使两个骨段围绕单个自由度旋转,以相对于第二骨段将第一骨段重新定向到包括两个基本正交平面中的非零矫正的期望取向。在一些方法中,两个基本正交平面可包括冠状矫正和矢状矫正。在一些方法中,计算机控制机器人可以与计算机通信,所述计算机被配置成在术前或在术中确定部分切口的位置和方向,计算其深度,计算获得两个骨段的最终期望对准所需的开口角和第一骨段相对于第二骨段的相对位置,所述最终期望对准包括双平面矫正。
36.还公开了一种非暂时性计算机可读介质,其存储程序,所述程序在由处理器执行时被配置成使所述处理器接收指示骨的第一矫正角的值,并且接收指示骨的第二矫正角的值,所述第二矫正角基本上正交于所述第一矫正角。此处理器被配置成确定指示包括所述第一矫正角和所述第二矫正角两者的修改的骨铰链轴线角的值。此处理器还可被配置成确定指示骨的第一骨段相对于骨的第二骨段的最终楔形开口角的值,所述值适应所述第一矫正角和所述第二矫正角两者。在一些实施例中,所述处理器可以通信地耦合到具有工作头的计算机引导机器人,所述工作头可根据至少三个自由度移动,并且其中所述程序在由所述处理器执行时被配置成使所述计算机引导机器人将所述工作头定向到由所述处理器确定的所确定的修改的骨铰链角。在一些实施例中,计算机引导机器人可以与导航传感器通信,所述导航传感器被配置成辅助将工作头定向在所确定的修改的骨铰链角。在一些实施例中,当切割工具联接到工作头时,处理器可以被配置成使计算机引导机器人利用切割工
具部分地切割到骨中,直到获得部分切口,所述部分切口将骨部分地分成由骨铰链连接在一起的两个骨段,骨铰链定向在修改的骨铰链轴线处。在一些实施例中,当钻孔工具联接到工作头时,处理器可以被配置成使计算机引导机器人沿着修改的骨铰链轴线钻入骨中。在一些实施例中,当楔形开口工具联接到工作头时,处理器可以被配置成通过使第一骨段相对于第二骨段围绕单个自由度旋转,来使计算机引导机器人将两个骨段牵开到最终楔形开口角。在一些实施例中,当切割引导件联接到工作头时,处理器可以被配置成使计算机引导机器人根据所确定的修改的骨铰链轴线将切割引导件定向在期望取向。
37.此外,本文公开了一种将第一骨段相对于第二骨段附接的示例性手术方法,两个段属于同一骨,所述示例性手术方法包括以下步骤:确定骨铰链的修改的铰链轴线角,所述骨铰链提供所述第一骨段相对于所述第二骨段的单个自由旋转度,所述修改的铰链轴线角引起所述两个骨段的最终期望对准,包括两个基本正交平面矫正。然后,围绕骨放置瞄准器组件。所述方法可包括在第一取向上定向所述瞄准器组件的引导管,接着沿着所述瞄准器组件的瞄准器臂移动所述引导管以沿着所确定的修改的铰链轴线角定向引导管的轴线。然后,钻可以通过引导管插入以形成穿过骨的孔,该孔的轴线限定骨铰链的修改的铰链轴线。在一些示例性方法中,移动引导管包括使引导管沿着瞄准器臂滑动。移动引导管可包括将引导管向上移动到与修改的铰链轴线角相关的瞄准器组件上指示的目标数值。放置瞄准器组件可包括首先将后牵开器围绕骨的后侧部分放置,并且将瞄准器臂联接在所述后牵开器的槽内以将所述瞄准器臂围绕骨的内侧部分和前侧部分放置。将引导管定向在第一取向上可包括操纵从后牵开器延伸的手柄。第一取向可以定义为仅引起两个基本正交平面矫正中的一个的取向。所述示例性方法还可包括:从所述引导管移除所述钻;以及将铰链销通过所述引导管插入。所述示例性方法可包括将所述铰链销插入穿过所述钻孔以主动接合后牵开器的一部分。所述示例性方法可包括从所述后牵开器移除所述瞄准器组件,从而使所述铰链销留在所述孔内且联接到所述后牵开器;以及将截骨切割引导件联接到所述后牵开器和所述铰链销。
38.本文公开了一种用于以预定修改的铰链轴线角穿过骨形成孔的瞄准器组件的示例性实施例。所述示例性组件包括瞄准器臂,所述瞄准器臂连接到牵开器并且围绕所述骨的外部部分延伸。所述组件还包括联接到所述瞄准器臂的引导管,所述引导管被构造成沿着所述瞄准器臂移动并且由此围绕所述骨移动,并且相对于所述骨改变引导管取向。所述引导管被构造成接收通过其形成骨孔的装置。所述引导管和所述瞄准器臂各自包括指示标记,所述指示标记彼此协作以指示与引导管相对于修改的铰链轴线角的取向相关的值。在一些示例性实施例中,引导管滑动地联接到瞄准器臂。在一些示例性实施例中,引导管还被构造成接收通过其的铰链销,以通过骨放置铰链销。在一些实施例中,引导管使铰链销朝向牵开器的接合机构瞄准。指示标记可包括瞄准器臂上的与修改的铰链轴线角相关的数值。数值可以提供相对于参考角高达31度的修改的铰链轴线角。参考角可以限定考虑单矫正平面的与骨的角度,修改的铰链角考虑双平面矫正。引导管和瞄准器臂被构造成与铰链销和牵开器断开,从而使铰链销和牵开器彼此联接,并且使铰链销保持通过骨孔。
39.本文还公开了一种用于使截骨的两个相对侧分离的薄片状撑开器的示例性实施例。示例性薄片状撑开器可以包括基部,该基部具有在截骨的两侧之间渐缩以滑动的远端。所述薄片状撑开器还可包括提升器,所述提升器具有近侧自由端并且邻近基部远端枢转地
联接到所述基部,所述提升器相对于所述基部旋转,在所述基部与所述提升器之间限定腔。所述薄片状撑开器还可以包括楔形结构体,所述楔形构造件可操作地联接到所述基部并且被构造成使所述楔形结构体的楔形件沿着所述腔轴向移动以使所述提升器旋转并且限定截骨的两侧的分离角。在一些示例性实施例中,楔形结构体包括平行于基部纵向轴线定向且可操作地联接到楔形件的导螺杆。导螺杆的旋转使楔形件沿着腔轴向移动。楔形件可以在楔形件的顶表面的分立部分处接合提升器。楔形件顶表面可以设置在腔内并且可以与提升器间隔开。楔形件可以在被构造成指示截骨的两侧的分离值的位置处接合提升器。
40.公开了一种相对于第二骨段附接第一骨段的示例性方法,两个段属于同一骨,所述方法包括部分地切割到骨中,所述切割被实施直到获得部分切口,所述部分切口将所述骨部分地分成由骨铰链连接在一起的两个骨段。骨铰链可以限定修改的铰链轴线角,所述修改的铰链轴线角被定向以考虑双平面矫正。该方法还包括使所述第一骨段相对于所述第二骨段围绕所述骨铰链围绕单个自由度旋转,直到获得所述两个骨段的期望三维对准,其中所述骨段的面对侧彼此分开预定开口角。该方法还包括固定两个骨段与骨板的期望三维对准,所述骨板包括骨接合表面和穿过其的孔,所述接合表面轮廓和所述孔中的至少一个的取向至少部分地被构造成考虑修改的铰链轴线角。在一些实施例中,骨板骨接合表面被轮廓化与以与所述骨的第一骨段和第二骨段的大致平行于修改的铰链轴线的优选位置的轮廓匹配。在一些实施例中,所述骨板骨接合表面被轮廓化以将所述板定位在大致面向所述修改的铰链轴线的位置处。在一些示例性实施例中,穿过板的孔中的至少一个限定复杂孔口,所述复杂孔口包括彼此成一定角度定向的两个重叠螺纹孔。两个重叠螺纹孔之间的角度可以至少部分地由修改的铰链轴线限定。仅对于单矫正平面,预定的修改的铰链轴线相对于铰链轴线越大,两个重叠孔轴线之间的角度差减小。在一些示例性方法中,所述骨是膝盖的骨,并且所述方法还可以包括形成通过所述骨的用于重建acl的隧道,并且其中两个重叠螺纹孔被构造成在避开通过所述骨的隧道的方向上穿过其放置至少一个固定构件。在一些示例性方法中,穿过所述板的孔限定下部多个孔和上部多个孔,所述下部多个孔被构造成定向以第一角度穿过其延伸的固定构件,所述上部多个孔被构造成定向以与第一角度不同的限定偏移角的角度穿过其延伸的固定构件,所述偏移角被构造成考虑由修改的铰链轴线产生的沿着所述骨的扭转。仅对于单矫正平面,修改的铰链轴线相对于铰链轴线越大,偏移角越大。
41.本文公开了用于在已围绕骨铰链牵开两个段之后相对于同一骨的第二段固定第一骨段的另一示例性板。骨铰链可被构造成围绕单个自由度旋转,且可定向在修改的铰链角轴线处,以获得考虑两个正交矫正平面的两个骨段的期望三维对准,其中所述骨段的面对侧彼此分开预定开口角。所述板可包括骨接合表面,所述骨接合表面被构造成在考虑所述修改的铰链角轴线的优选位置处与所述板的表面匹配。在一些实例中,所述骨是膝盖的骨,并且可以形成用于重建或修复acl的隧道。所述板可包括穿过所述板的上部部分的孔口,所述孔口被构造成瞄准固定构件以适应伴随的acl修复或重建。所述固定构件可以延伸通过孔口并且邻近穿过其形成的隧道,但不与该隧道相交。在一些示例性实施例中,所述孔口限定复杂孔口,所述复杂孔口包括彼此成一定角度定向的两个重叠螺纹孔,并且其中,所述角度至少部分地由修改的铰链轴线角限定。仅对于单矫正平面,预定铰链轴线角相对于铰链轴线越大,两个重叠孔之间的角度越小。所述两个重叠螺纹孔被构造成在避开用于重
建acl的隧道的方向上穿过其放置至少一个固定构件。在一些示例性实施例中,板骨接合表面被轮廓化以与优选位置处的骨的表面轮廓匹配,所述表面轮廓横穿所述牵开并且大致面向修改的铰链轴线角。所述板可包括穿过所述板的多个孔口,所述多个孔口限定下部多个孔口和上部多个孔口,所述下部多个孔口被构造成定向以第一角度穿过其延伸的固定构件,所述上部多个孔口定向以与第一角度的偏移角穿过其延伸的固定构件,所述偏移角被构造成考虑由于修改的铰链轴线角而沿着骨的扭转,并且其中仅对于单矫正平面,所述修改的铰链轴线角相对于铰链轴线角越大,偏移角越大。
42.另外,公开了一种用于压缩开放楔形截骨的骨外侧铰链的骨板屈曲系统,所述屈曲系统与骨板和紧固件一起使用。所述骨板限定多个螺纹孔,以接收通过其的与所述螺纹孔接合的多个紧固件。所述骨板包括骨接触第一表面、相对的第二外表面,以及以所述第一表面与所述第二表面之间的尺寸延伸的厚度。所述系统包括第一轴,所述第一轴具有手柄端和螺纹端,所述螺纹端用于与所述多个螺纹孔中的第一螺纹孔螺纹接合。所述系统还包括第二轴,所述第二轴具有手柄端和螺纹端,所述螺纹端用于与所述多个螺纹孔中的第二螺纹孔螺纹接合。所述第一轴和所述第二轴各自限定纵向轴线。所述系统还包括具有远端的设备,所述远端被构造成接合两个轴手柄端。所述设备还包括致动装置,所述致动装置用于使第一轴手柄端和第二轴手柄端在与骨板接合的同时相对于彼此移动,从而使骨板弹性地屈曲。
43.在一些示例性实施例中,所述设备包括将骨板维持在弹性屈曲构型的装置。所述第一轴和所述第二轴均可限定钻引导件。所述第一轴螺纹端和所述第二轴螺纹端可以限定比板厚度长的长度,使得所述螺纹端延伸超过所述板的第一表面,并且在所述第一表面与所述骨之间形成局部隔开。所述第一轴端和所述第二轴端可以独立地与所述骨板可接合,并且可以通过手动来接合和脱离。所述第一轴端和所述第二轴端都可接合所述骨板的设置在所述多个孔中的第三孔的任一侧的孔。所述第一轴端和所述第二轴端都可接合所述骨板的设置在板的相对端(例如,下端和上端)处的孔。所述第一轴端和所述第二轴端都可接合所述骨板的在截骨牵开的每一侧上的孔。
44.本文还公开了一种弹性地弯曲骨板并由此压缩开放楔形截骨的骨铰链的方法。所述骨板稳定开放楔形截骨,并且包括用于与截骨的上侧固定的上部分和用于与截骨的下侧固定的下部分。所述方法包括邻近骨的截骨放置骨板,所述骨板具有穿过板上部部分设置的第一多个螺纹孔和穿过板下部部分设置的第二多个螺纹孔。板的上部部分固定在骨上。第一细长主体与所述第一多个孔中的一个孔接合,并且第二细长主体与所述第二多个孔中的一个接合。然后,板弯曲工具与第一细长主体和第二细长主体接合。使用板弯曲工具,经由第一细长主体和第二细长主体施加力以使板沿着板纵向轴线弹性地弯曲。在施加力时,骨板进一步固定在骨上,在第一细长主体与第二细长主体之间间隔开的位置处,从而压缩骨铰链。在一些示例性方法中,施加力以使板弹性屈曲将板的下部部分移动得更远离骨。所述方法可包括在将骨板的一部分固定在第一主体与第二主体之间间隔开的位置处之后,从第一细长主体和第二细长主体释放所述板弯曲工具,由此朝向骨释放所述板的下部部分。
具体实施方式
45.以下讨论涉及本发明的各种实施例。尽管这些实施例中的一个或多个可能是优选
的,但是公开的实施例不应被解释为或以其它方式用于限制本公开的范围,包括权利要求书。另外,本领域技术人员将理解以下描述具有广泛的应用,并且对任何实施例的讨论仅旨在作为该实施例的示例,并不旨在暗示包括权利要求书的本公开的范围被限制到该实施例。
46.本公开大体上可包括用以确定、形成和固定骨对准调整的改进的方法和系统,所述骨对准调整包括截骨并且适应在两个基本正交平面中进行矫正的骨对准。本公开可包括acl修复或重建(包括伴随的骨对准调整)的改进的系统和方法。这些方法和系统可以确定适应包括两个基本正交平面的目标骨对准的修改的开放或闭合楔形角和骨铰链轴线。这两个基本正交平面可以是身体的矢状面和冠状面。本公开还可包括方法,该方法包括计算或确定改进的铰链开口角和铰链轴线以适应围绕两个基本正交平面的目标骨对准。此铰链开口角和铰链轴线被构造成仅使截骨围绕单个自由度旋转,因此不需要扭转骨铰链以适应双平面对准。本公开还包括用于形成和维持这种改进的截骨切割角和/铰链线和铰链开口角,从而适应骨上的变化的力和扭转的系统。截骨可以是胫骨高位截骨的一部分,或股骨低位(或远端)截骨的一部分。截骨可以是肩-肘-腕(sew)重新对准的一部分。截骨可以是包括开放楔形截骨或闭合楔形截骨的程序的一部分。在闭合楔形截骨中,移除楔形骨,并且两个段朝向彼此旋转。因此,本公开还可以包括确定与待移除的楔形骨的尺寸、角度和位置相关联的参数,使得在移除时,两个段的旋转使它们围绕单个自由度旋转并且适应双平面矫正。
47.可在程序的术前规划阶段期间确定包括两个基本正交平面的期望矫正角。例如,使用一系列若干术前医学图像和数据(例如,x射线回声、mri或cat扫描),外科医生知道例如患者的病理角度hka(髋-膝-踝)或替代sew(肩、肘、腕)。例如,图3a和3b中所示的内容表示通常由x射线获取的胫骨的两个视图。图3a示出了用于确定内翻矫正的前-后视图,该内翻矫正另外定义为冠状面中的矫正。图3b示出了用于确定ap矫正的矢状视图,该ap矫正另外定义为矢状面中的矫正。基于这些期望角度,计算机可以被配置成确定两个骨段的期望目标对准。计算机可包括一系列数学方程式,或查找表。计算机可包括3d建模程序,该建模程序可基于医学图像数据自动地对当前解剖取向建模,并且确定铰链轴线的目标取向。替代地或另外,计算机可以确定骨表面上的起始位置(92)、相对于矢状面和冠状面的取向、未来部分切口的深度、骨段牵开或旋转之后的铰链的开口楔形角,以及第一骨段相对于所述第二骨段的相对三维位置中的至少一者。计算机可以包括3d建模程序,该建模程序可以基于医学图像数据对当前解剖取向交互地建模,并且允许外科医生修改目标骨对准,并且确定未来部分切口的位置、方向和深度,骨段旋转之后的铰链的开口角,以及第一骨段相对于第二骨段的相对三维位置中的至少一者。计算机可以是平板电脑(包括“app”)的形式,并向外科医生或手术技术员提供信息。计算机可以与机器人和/或手术导航系统或3d定位器(直接或无线)通信,所述机器人和/或手术导航系统或3d定位器被配置成在将解剖结构与虚拟模型配准之后,将切割工具、引导件和/或钻放置在期望位置和取向。
48.计算机还可以解决诸如前交叉韧带(acl)重建与胫骨高位截骨(hto)的组合手术。在此实例中,使用电镀螺钉的acl重建隧道和截骨切割可能会无意中相交,从而产生负面手术结果。使用3d计算机导航,可以消除该问题。替代地,基于这些医学图像,外科医生可以直接参考图表或查找表(而不是使用计算机)来确定未来部分切口的位置、取向和深度,铰链轴线相对于矢状面的角度,以及第一骨段相对于第二骨段的相对三维位置中的至少一者。
在其它实施例中,可以使用机械计算机,其中可以将基于医学图像的两个角度输入到机械计算机结构体中,该机械计算机结构体通过凸轮和连杆机械地解析旋转和楔角。
49.例如,对于期望的内翻矫正角和ap倾斜矫正角,使用例如图3a和3b中的两个图像,可确定修改的铰链轴线取向。仅对于内翻矫正角,铰链轴线通常基本上平行于矢状面延伸,并且在下文中被定义为参考平面。图4a表示具有变化的输入角的胫骨模型。这可以用作相对于参考平面计算修改的铰链轴线角的手段,该手段可以并入到计算机中,或者用于形成查询表,如先前所述。图4a中示出了例如使用前-后图像(图3a)确定的示例性内翻矫正角图4a中示出了例如使用矢状图像(图3b)确定的示例性ap倾斜矫正角出于参考目的,前侧、后侧、外侧和内侧被示出,并且对应于胫骨的前侧、后侧、外侧和内侧。对于参考点,真正的ap轴线可以是图1b和1c中的边界线94,示出了对应于与矢状面平行的单平面矫正。可在使用图4b作为参考,已知ap和内翻的情况下确定由相对于ap轴线或相对于矢状面的旋转角(θ)修改的修改的铰链轴线450的等式可以如下所示。求解x;
[0050][0051]
(其中l=1)
[0052][0053]
求解y;
[0054][0055][0056]
求解铰链角;
[0057]
铰接
[0058]
铰接
[0059]
用tan替代x;
[0060][0061]
可以使用类似参考对其它骨进行类似计算。例如,修改的轴线可以围绕骨的纵向轴线并且关于沿着骨的在解剖学上适当的任何平面旋转。例如,可以相对于通过骨的矢状面或冠状面计算旋转角θ。
[0062]
另外,可以确定新的牵开角γ’,并且该新的牵开角是考虑两个基本正交角(即内翻矫正角和ap倾斜矫正角)的所得角。此新的牵开角γ’或与修改的铰链轴线角组合的单个组合“总角度”被构造成相对于第二骨段定向第一骨段,其中围绕单个自由度旋转(不使两个骨段相对于彼此扭转)考虑至少两个基本正交产生平面。
[0063]
可在已知和内翻的情况下确定所得楔形角γ’的等式如下所示。
[0064][0065]
下文示出了使用上述等式的示例性查询表。v/v表示内翻矫正角a/p表示
ap倾斜矫正角“总角度”是所得楔形开口或如上描述的。下面的图表中的“旋转角”是根据上述等式的“铰接”,并且是对铰链线轴线的角度(
°
)的修改,在图5a和5b上指示为θ。总之,此算法或系列计算使用由两个矫正平面(即,内翻角(冠状面)和ap角(矢状面))中的角(线)描述的平面:并将其解析成使用空间中的轴线(铰链轴线)和单个(总)角度描述的“手术上有用的”单平面。
[0066]
v/va/p总角度旋转角505.00525.421.7546.438.6567.850.110010.0010210.211.210410.821.610611.630.715015.0015215.17.415415.514.615616.121.3
[0067]
图4c示意性地表示在减小胫骨平台的前/后倾斜的第一方向上针对围绕冠状面的一系列ap矫正的15度内翻矫正的一系列示范性铰链轴线角取向。图4d示意性地表示在增加胫骨平台的前/后倾斜的第二方向上针对围绕冠状面的一系列ap矫正的15度内翻矫正一系列示范性铰链轴线角取向。将存在患者需要增大ap倾斜的情况,以及患者需要减小ap倾斜以优化双平面矫正的情况。不适当的ap倾斜会导致增加acl断裂的风险。在某些情况下,acl重建与hto程序同时完成。
[0068]
ap倾斜矫正可包括增大或减小胫骨平台的ap倾斜。截骨将与骨铰链位置相对打开。如果铰链如图4c中所示向前(或顺时针)旋转,截骨将向后打开,从而减小胫骨平台ap倾斜。如果铰链向后旋转(图4d),截骨将向前打开,从而增加ap倾斜。总之,向后旋转铰链轴线将使ap倾斜正增加。向前旋转铰链将减小ap倾斜。图5a示出了表示铰链轴线围绕纵向轴线(例如轴线a-a)的旋转角θ的三个变化的视图。在此实例中,相对于矢状面提供角θ。左侧图像表示向前旋转铰链,而右侧两个图像表示向后旋转铰链轴线。图5b示出了与横向平面平行的胫骨的俯视图,其具有示例性旋转角θ(旋转角)。参考线r-r指示为仅如图1b和1c中所示和描述的冠状矫正进行的典型切割。
[0069]
图6a-6c表示可用于形成通过本文公开的骨80的双平面截骨的系统和方法的各部分。示例性系统和方法可以包括确定修改的铰链轴线角(θ)和位置。这可以使用例如计算机程序或查找表来实现。然后,可以在此修改的铰链轴线位置和取向处定位穿过骨的铰链销600。机械引导件可用于帮助外科医生沿着修改的铰链轴线角放置此销600。例如,引导结构体可包括彼此以一系列角度对准的对应于多个分立的修改的铰链角的一系列开口或管,所述开口被构造成接收通过其的导丝、钻、环钻或销中的至少一者。作为另一实例,引导结构
体可包括可在一系列位置之间滑动的标记或开口,所述位置对应于多个修改的铰链角,所述开口还被构造成接收通过其的导丝、钻、环钻或销中的至少一者。
[0070]
在至少图8a-8d中公开了示例性瞄准器组件800。在此实施例中,一旦瞄准器组件800已对准,就可以首先使钻头通过开口810插入,开口810与预定的修改的铰链轴线取向对准。钻可以穿过骨插入以在修改角度θ处产生与铰链线轴线对应的隧道。然后,可以移除钻,并用销600代替它。替代地,钻头也可以兼任铰链销,并且保持在适当位置。切割引导件610可以操作方式联接到铰链销600以将切割工具620放置在相对于铰链销600的期望位置处。然后,可以移除引导件610和铰链销600,并且两个骨部分围绕由修改的铰链轴线角限定的单个自由度牵开,并且由此实现双平面对准。这可以产生考虑冠状矫正和矢状矫正两者的开口,而不扭转骨铰链,并且因此是限于单个自由度的牵开。
[0071]
在替代系统和方法中,铰链销600可以被消除,并且切割引导件610可以被构造成将切割工具620放置在期望取向上以形成切口,该切割根据确定的修改角度以与矢状面成一定角度调整和定向。因此,切口的末端限定了修改的铰链轴线450或限定修改的铰链轴线的边界,修改角度(θ)不平行于矢状面。替代地,可以避免瞄准器组件800,并且钻头可以联接到机器人的工作端,所述工作端可操作以在期望取向和位置处定向钻头,以将铰链销600定向在确定的取向上并将其放置到骨中。替代地,可以避免瞄准器组件800,并且切割工具可以联接到机器人的工作端,所述工作端可操作以在期望取向和位置处定向切割工具,以将截骨600定向在确定的取向上,从而形成部分地穿过骨的终止于与预定的修改的铰链轴线对准的边界的截骨。
[0072]
替代系统和方法可包括形成患者特定的切割引导件和/或铰链销取向结构体。这可以用于穿过骨80和/或对应的切割平面放置铰链销,从而考虑两个基本正交矫正平面。类似于所公开的先前实例,此示例性系统和方法可包括确定修改的铰链轴线角和位置或切割平面取向和位置。此示例性系统和方法可包括确定符合胫骨的外表面轮廓的切割引导表面形态。引导表面轮廓可被构造成将引导件放置在形成预定截骨的目标位置和取向中。更具体地,引导轮廓可以定位引导件,并且可以使铰链销和/或切割锯620在确定的位置和取向处穿过胫骨定向,所述位置和取向使骨以围绕单个自由度旋转而重新对准并且适应双平面矫正。引导形态可以使用图像(例如,ct或x射线)和3d图像来确定。确定3d表面形态可包括使用计算机程序。可以基于所接收的这些图像根据确定的患者特定的形态来形成或修改机械引导件。例如,可以形成或修改引导件的内表面以具有被构造成接合和匹配确定的患者特定的胫骨外表面的内侧的位置的内表面形态。匹配优选地被构造成将锯620放置在确定的起始位置和取向处以形成确定的截骨轨迹。引导件610还可包括以确定的角度对准铰链销600的结构体。铰链销对准结构体可以包括患者匹配的参考表面,该患者匹配的参考表面被专门构造成以确定的修改的轴线角度使铰链销穿过胫骨对准。铰链销患者匹配的参考表面可以与引导件的表面或与患者骨的外表面协作。
[0073]
图6c示出了形成确定的楔形牵开角γ’的手段,其考虑了两个基本正交矫正平面。第一装置可包括具有刻度660的楔形件650。刻度660可以包括指示楔形开口角(例如角γ’)的值。楔形件600是锥形的以逐渐插入和牵开,并且可以被向上轻敲或推动直到确定的楔形角,刻度660指示牵开角γ’。为了考虑两个基本正交矫正平面,楔形件可用于使两个骨段旋转直到修改的牵开角γ’。楔形件650可以选择性地联接到手柄,该手柄包括被构造成被轻
敲或锤击以逐渐牵开两个骨段的表面。
[0074]
图7a-7f示出了在股骨70上形成闭合楔形双平面矫正的示例性方法。类似于先前公开的方法,示例性方法可以通过确定修改的铰链轴线角和位置开始。该方法还可以确定楔形尺寸,并且由此确定进入骨中的两个切口的取向,因为闭合楔形截骨移除了楔形骨部分并且两个剩余表面朝向彼此旋转。例如,可以使用计算机程序、app或查找表实现预先确定修改的铰链轴线和楔形尺寸。类似于组件800的瞄准器组件可以首先接合股骨70,并且开口810可以沿着臂820移动到确定的角度(图7a)。钻可通过开口810插入以形成与穿过股骨的预定的修改的铰链轴线对准的孔。钻可以保持在适当位置,以充当销或被移除并由铰链销600替换。然后,可以移除瞄准器组件800,从而使销600留在适当位置,并且切割引导件610可以操作方式联接到铰链销600以引导第一切口701通过股骨70直到铰链销600(图7b)。然后,切割引导件610可以移动到第二位置,同时保持与铰链销600接合(图7c)。切割引导件610可以旋转预定量,以形成预定的楔形尺寸。楔形尺寸指示器755可以可操作地联接到切割引导件610,该楔形尺寸指示器具有指示楔形尺寸的标记。指示器755可包括可插入穿过切割引导件610的锯形引导槽612的第一唇缘756,以及可插入第一切口701中的第二唇缘757。然后,切割引导件610可以围绕销600向上旋转,直到如指示器755上指示的预定的楔形尺寸。然后,可以移除指示器755并且形成直到销600的第二切口702。然后,可以移除引导件610和铰链销600,并且移除所得的骨楔形件以形成具有适应双平面矫正的旋转轴线的开口γ’(图7e)。然后,两个骨部分可以围绕由修改的铰链轴线角限定的单个自由度朝向彼此旋转,并且由此实现双平面对准。然后,两个段可以用板780固定在适当位置。
[0075]
图8a-8c示出了用于放置铰链销600,从而在修改的铰链轴线θ处定向骨铰链轴线的瞄准器组件800的细节。如图所示,组件800可以允许从参考角度r-r(图5b)在任一方向上旋转高达三十度的铰链角。在图8a中显示了角度为零,且瞄准器组件800沿着参考角度r-r定向。在使用中,外科医生可以首先将后牵开器850围绕胫骨80的后部分放置,然后将瞄准器组件800与牵开器850连接。然后,可以最初调整瞄准器800以对准引导管810以仅用于内翻矫正角(在零处),并且因此基本上平行于本文的沿参考角r-r限定的矢状面。使用来自查找表、计算机程序或应用程序的信息以及程序前图像和规划,然后可以通过使瞄准器800的一部分围绕瞄准器臂820滑动到确定的修改的轴线角θ来调整引导管810。引导管810可被构造为接收通过其的钻,并且以预定的修改的铰链轴线角θ使钻瞄准通过胫骨80。然后,可以可选地以此预规划的轴线角将铰链销600(如图6a和6b中公开的)放置在钻孔内。
[0076]
图8b示出了瞄准器800的分解视图。瞄准器臂820被构造成连接到后牵开器850,如图8e中可见,所述后牵开器可用于稍后联接到引导截骨的结构体,如本文所公开的。瞄准器臂820限定连接端812,该连接端可包括球柱塞814。这可包括偏置构件,以帮助将瞄准器臂820保持在后牵开器槽内。瞄准器臂820被构造成围绕患者膝盖的外表面延伸。瞄准器臂820限定诸如激光标记的标记,以指示与本文中所公开的“旋转角”或修改的铰链线轴线θ对应的角度。瞄准器引导件825可以滑动地联接到瞄准器臂820。瞄准器引导件825还可包括用于接收通过其的引导管810的套管,使得引导管810可以从瞄准器引导件825移除。使引导件825沿着臂820且因此围绕骨80滑动也使引导管810围绕骨移动。移动瞄准器臂820以使标记对准指示旋转角θ的值被构造成以确定的修改的铰链轴线角对准引导管。瞄准器引导件825还可包括用以选择性地将引导件825相对于臂820锁定在目标位置中的装置。螺纹柱塞830
可以延伸穿过臂825,并且可以选择性地接合臂820的一部分从而以目标修改角度锁定引导件825。旋钮832可以操作柱塞830以选择性地锁定引导件825。一系列孔或细长槽824可以接收柱塞830的使用旋钮832选择性地插入的端部。瞄准器800还可以包括用于将管810保持在适当位置的结构体860。结构体860可包括棘轮柱塞、锁定盖和弹簧,其可以与管810上的脊811协作以将管810轴向固定在引导件825内的适当位置。
[0077]
图8c示出了通过瞄准器800和牵开器850的横截面。球柱塞814连同锥形连接端812可插入牵开器850的槽855中。这使瞄准器臂820与牵开器850对准,使得铰链销600将与牵开器850精确对准。牵开器850还可被构造成主动接合铰链销600的一端。例如,牵开器850可包括具有保持式balseal或弹簧状o形环854的开口852,以将铰链销600固定到后牵开器850。开口850可包括朝向牵开器850的骨接合表面打开的锥形开口853,以引导销600的接收和与开口852的对准。然后,可以移除瞄准器800,从而将牵开器850和销600留在适当位置,并且可以将切割引导件组装到铰链销600和牵开器850。在图6b中示出了参考铰链销600的示例性切割引导件610。切割引导件可部分地类似于在2019年2月20日提交的标题为“system and method for high tibial osteotomy(用于高位胫骨截骨的系统和方法)”的共同拥有的专利申请第62/808129号中公开的切割引导件;所述专利申请以全文引用的方式并入本文中。
[0078]
铰链销600可以将切割引导件610定位在目标位置和取向中,以产生相对于修改的铰链轴线角θ的优选截骨平面角。切割引导件610可以连接到后牵开器850。铰链销600还提供了截骨的屏障或边界,由此限制了锯(例如工具620)的行进,从而产生高精度截骨切口。然后,可以移除切割引导件610和销600,并且将前切割引导件900放置在胫骨80附近,以定向横向切口从而缓解腓骨肌腱。示例性前切割引导件900示出为具有可配合在两个骨段之间的由截骨形成的唇缘。在2019年2月20日提交的标题为“system and method for high tibial osteotomy(用于高位胫骨截骨的系统和方法)”的至少共同拥有的专利申请第62/808129号中公开了前切割引导件;所述专利申请以全文引用的方式并入本文中。这种前切口允许出现截骨开口。
[0079]
在预规划期间,外科医生可以使用所提供的一系列图表,其实例已在本文中公开。例如,对于确定的内翻矫正(度)和确定的ap倾斜矫正(度),可以确定修改的铰链轴线角取向(度),并且瞄准器800可以将引导管以及因此铰链销600定向在该确定的轴线角。另外,在相同的两个输入矫正的情况下,图表还可以提供总体开口角(铰接))。替代性地,可以设置楔形开口距离(例如,以mm为单位)代替或补充开口角γ。在替代实施例中,计算机程序或应用程序可以转换两个输入矫正角,并向外科医生提供修改的铰链角轴线和楔形开口尺寸。
[0080]
图10a示出了可牵开两个骨段的另一实施例薄片状撑开器。薄片状撑开器1000被构造成以受控速率牵开两个骨段。薄片状撑开器1000还可包括指示开口角和控制开口到先前使用图表确定的目标开口角(γ’或铰接)的装置。撑开器1000还可包括在达到开口时保持所述开口的装置。开口距离在程序之前规划,并且需要准确性以便改善患者结果。截骨必须缓慢、小心且准确地打开到适当的开口尺寸以减轻骨铰链81的开裂。撑开器1000还包括提供关于开口尺寸的反馈的装置。撑开器1000优选地是多用途的,并且因此被构造成被拆卸和灭菌。撑开器1000优选地较小,宽度小于1/2英寸和长度小于4英寸,以放置在截骨的两个骨段之间,但仍然不遮掩目标部位。
[0081]
参见图10b,其示出了放置在通过胫骨80的截骨形成的两个骨段之间的撑开器1000。瞬时开口角可以为15度(图10c),由楔形部分上的与提升器上的标记对准的数值示出,稍后更详细地公开。撑开器1000可包括基部1010,该基部具有滑入截骨中的尖端1020。因此,尖端1020限定锥形端。撑开器1000可被锤击以最初插入尖端1020。尖端最初可以插入到截骨的端部,同时呈低型面构型。撑开器1000包括提升器1030,该提升器可以被可控地打开以接合骨段中的一个并且使骨段彼此牵开。公开了控制提升器1030的多个实施例。此撑开器组件1000的关键特征包括以慢速控制提升器1030的升降率的装置;开口值的指示装置,或将开口值限制为目标值的装置;以及呈低型面的铰链装置。
[0082]
例如,在图10a-10f中示出了包括导螺杆楔形机构的第一实施例。所述机构包括联接到导螺杆1055的导螺杆旋钮1050,所述导螺杆使楔形件1060朝向尖端1020轴向地移动,并且使提升器1030将截骨牵开到期望尺寸。提升器1030可包括自由端1032。提升器1030可以枢转地联接到基部1010并且可以相对于该基部旋转,从而在基部1010与提升器1030之间限定可调节腔1015。楔形件1060可以轴向地移入和移出腔1015以限定提升器1030的取向,并且由此打开两个骨段之间的尺寸。楔形件1060可以接合提升器1030,该提升器与指示楔形件的开口尺寸的指示器或数字标记重合。此处示出了使用具有数值的激光标记线指示开口尺寸,其对应于截骨开口角或开口间隙尺寸。例如,提升器1030上的指示器与楔形件1060上的数字“15”对齐,如图10c所示,这可以与15mm的截骨开口相关。替代地,螺纹楔形件可以切换成患者特定的楔形件,例如,该患者特定的楔形件当在组件中向前线性移动到限定激光线时可以将截骨打开到外科医生在术前限定的目标开口尺寸。设置在腔1015内的楔形件1060的部分可以与提升器1030间隔开。提升器可以仅在与开口尺寸指示器重合的分立位置处接合楔形件。导螺杆1055限定平行于基部纵向轴线的轴线,并且可以操作以使楔形件沿着基部1010线性地移动。为了减小组件1000的尖端1020的总高度,枢轴限定无硬件(hardware-less)联接且由此限定低型面联接。图10d-f中示出了可以通过旋转提升器1030直到平坦表面1033平行于基部平坦表面1012来从基部1010移除提升器。
[0083]
在图11a和11b中示出了包括使用棘轮提升器1100控制开口的装置的替代实施例。手柄的致动可使棘轮提升器1100旋转以牵开截骨。基部1120可包括固定棘轮机构1125,该固定棘轮机构可操作地联接到提升器1100以旋转提升器1110。例如,当提升器臂1100旋转打开时,每个棘轮步幅可以等于1mm的楔形开口,因此用户可以计算距可听棘轮的开口距离。当需要关闭时,可以推动棘轮顶部的突片,并且提升器臂可以自由向下旋转回到原位。
[0084]
图11c示出了替代实施例撑开器1150,其包括经由导螺杆1108联接到导螺杆轮1105的线性致动器,所述导螺杆轮在转动时向前驱动线性致动器1110。该线性致动器1110直接联接到联接臂1115,该联接臂联接到提升器1180;并且由此打开截骨。在其它替代实施例中,可基于预规划图像来提供或形成一组患者特定的楔形件。这些楔形件可包括多个可互锁的衬垫段。这些段可以彼此相邻放置,以逐渐增加开口,直到预规划的最终楔形开口γ’,如在预规划期间确定的。
[0085]
本公开现在转向固定板实施例,所述固定板实施例被构造成向骨铰链提供固定和任选的压缩,其可以适应避免骨铰链扭转的双平面对准,如本文所述。通常,发明人已发现,对截骨取向和旋转轴线的修改导致沿着骨的扭转力和骨铰链上的扭矩的变化。因此,公开了考虑这些变化的多个改进的板实施例。第一板固定可优选地在解剖结构允许的情况下直
接与修改的铰链轴线相对地设置。另外,如果伴随的acl重建程序将隧道添加到胫骨,则板可包括与直接固定构件不同的孔口,例如,围绕或远离此隧道的锁定或压紧螺钉。这些孔口的构造可取决于修改的铰链轴线且由此取决于板位置。因此,根据修改的铰链轴线设想了一系列板。一些板实施例可包括考虑到其它解剖结构考虑因素(例如mcl)与骨上的可与一系列铰链轴线角直接相对的优选位置的解剖结构匹配的轮廓。考虑到该板的优选位置,所述一系列板还可以包括专门构造成容纳acl隧道的孔口。所述板还可包括在所述板的近侧头部与远侧尾部之间的偏移轴线,以考虑胫骨上的扭转力和局部解剖学考虑因素。
[0086]
图12a示出了放置在已被牵开的胫骨80上的第一示例性实施例板1200。板1200包括通过其的多个单轴线孔1210,所述单轴线孔用于接收通过其的固定构件。板1200可以是“t”形的。孔1210大体上被配置成接收一系列固定构件1210,例如非锁定/锁定螺钉,所述固定构件用于将板1200附接到胫骨80的包括在牵开截骨上的部分。板1200限定成形为接合骨的第一表面1240以及相对的外表面1245,在第一表面与外表面之间限定板厚度。板1200包括至少一个复杂孔口1220,该至少一个复杂孔口具有延伸穿过板厚度的两个紧邻的重叠孔。这为外科医生提供了在将固定构件1212放置在两个取向中的一个的选择。例如,第一固定取向1221a允许正交插入,其中固定构件1212遵循周围的邻近固定构件的取向。第二固定取向1221b可以更平行于后胫骨82表面。此第二取向1221b可以避开在组合hto/acl手术期间形成的胫骨acl移植物隧道,或增加附近螺钉之间的距离以覆盖胫骨干骺端中的较大区域。因此,两个重叠孔包括:沿着第一轴线延伸的第一孔,所述第一孔将固定构件放置在第一固定取向中;以及沿着第二轴线延伸的第二孔,所述第二孔将固定构件放置在第二固定取向中,所述第二固定取向不同于所述第一取向。第一轴线与第二轴线之间的角度可以至少部分地鉴于围绕胫骨的板位置来限定,所述板位置可以至少由修改的铰链轴线角限定并且还基于通过胫骨的acl隧道的位置来构造。复杂孔口1220被构造成仅与单个固定构件接合,因此可以选择取向1221a或1221b,而不是同时选择两者。
[0087]
在图12c和12d中示出了复杂孔口1220延伸穿过板厚度,并且包括具有彼此偏移的中心的至少两个重叠孔。复杂孔口1220可包括从板表面1245延伸的倒角1222,以便于穿过其放置固定构件。两个重叠孔中的每一个限定螺纹部分以与固定构件1212上的螺纹接合。复杂孔口1220可以限定八字形形状。复杂孔口倒角1222从第二(外)表面1245上的八字形开口延伸,并且可以与螺纹部分相交。
[0088]
复杂孔口1220优选地放置在板1200的上部分上并且穿过板1200的被构造成最靠近胫骨的前侧的部分。在acl重建手术期间的前部部分可具有穿过胫骨形成的隧道和沿着隧道放置的移植物。取决于隧道位置,第二轴线取向1221b可优选地将固定螺钉放置在不干扰acl重建隧道或半月板根修复隧道的位置。图12b示出了矫正针对由于a/p没有旋转的铰链轴线(r-r)在胫骨上的优选位置放置板1200;旋转角θ为零。板1200可优选地具有轮廓表面,该轮廓表面被构造成与如图所示的该内侧-前侧位置中的胫骨的形状大致匹配,从而减少邻近软组织与板之间的刺激。复杂孔口1220可以限定正交于板1200的第一轴线和相对于第一轴线以10-30度之间的角度(f)定向的第二角度,并且可以优选地距第一轴线约15度。第二角度取向优选地避开可通过胫骨形成的任何acl隧道(图18b和18c中的87)和位置。
[0089]
现在,本公开转向讨论当铰链轴线角旋转时胫骨80上的力的变化。图13a示出了围绕位置n(类似于图12b中所示的位置)放置和居中的板1200上的扭矩τ1和τ2,用于未修改的
板铰链轴线。过大的力被f
铰链抵抗
抵消。扭矩直接作用于铰链81上。图13b表示示例性情况,其中可以建议将铰链轴线旋转15度以适应冠状面矫正。在此示例性情况中,如果板围绕由n指示的同一位置居中,则骨铰链上的扭矩将更大,原因是d2更大。因此,优选地将点n移动到更内侧-后侧位置;例如朝向点b移动。这减小了尺寸d2且由此减小了骨铰链上的扭矩。然而,在极端情况下,与修改的轴线直接相对地放置板并不总是合理的,因为板可能干扰mcl和朝向胫骨的后部部分82的一些神经血管结构。板优选地与修改的铰链轴线直接相对地放置,由此减小受解剖限制限制的尺寸d2。
[0090]
因此,可以设置多个板,其不仅容纳患者的左或右腿,或不同胫骨尺寸,而且还容纳板的调整放置以针对修改的铰链轴线角θ减少骨铰链81上的扭矩。例如,对于图4c中所示的减少a/p矫正的双平面矫正,示例性板1200’可优选地被轮廓化以相对于板1200放置在更内侧和后侧,从而更直接地面对修改的铰链轴线。在图13c中示出了板1200和板1200’及其相对示例性位置。此板1200’可被构造成通过被优选地轮廓化以与胫骨80的更内侧外表面匹配来减小骨铰链81上的扭矩。板1200’可包括双向复杂孔口1220’,该双向复杂孔口具有正交于板定向的第一轴线,以及以与第一轴线取向不同的第二取向定向的第二轴线。此第二取向可以相对于第一轴线在0-30度之间。与板1200相比,被构造成放置在更内侧和后侧的板1200’可能具有在这些重叠孔的第一轴线与第二轴线之间的减小的角偏移。例如,板1200’可以具有几乎平行的轴线或0-5角度的轴线差,而板1200可以在第一轴线与第二轴线之间具有15角度的角。
[0091]
可以提供多个板以适应一系列修改的铰链轴线角。所述板可以包括基于修改的铰链轴线角与优选位置匹配的轮廓。所述板可包括如本文公开的复杂孔口,该复杂孔口具有可彼此不同的至少两个轴线取向。两个轴线可以角偏移由如本文公开的修改的铰链轴线角或修改的截骨取向限定的值。所述两个轴线可以角偏移以提供固定装置的多个放置角度,同时相对于该优选位置避开acl隧道或mcl。例如,多个板中的第一板可包括匹配胫骨外表面的第一部分的第一定制轮廓形状,并且还可包括第一复杂孔口,该第一复杂孔口具有彼此角偏移以提供避开acl隧道的手段的一对轴线。多个板还可包括第二板,该第二板包括第二定制轮廓形状,该第二定制轮廓形状与胫骨外表面的由于修改的铰链轴线角而不同于第一部分的第二部分匹配。第二板还可包括第二复杂孔口,该第二复杂孔口具有以不同于第一板的第一角偏移的第二角偏移定向的被构造成提供避开acl隧道的手段的一对轴线。
[0092]
图14a和14b示出了替代板实施例,其被构造成围绕胫骨80放置在更内侧位置,类似于板1200’。这可适应由于如本文公开的旋转铰链轴线角θ而造成的骨铰链81的扭矩的变化。板可以是“l”形状,其中至少一个复杂孔口1410设置在板1400的被构造成放置在胫骨的最前侧位置中的端部处。复杂孔口1410被构造成接收第一固定构件1415a或第二固定构件1415b,但不同时接收两者。复杂孔口1410被构造成限定第一固定构件1415a和第二固定构件1415b的取向,每个取向彼此不同,并且被构造成鉴于如本文公开的胫骨解剖结构和acl隧道放置,向外科医生提供取向的选择。
[0093]
图15a-15e示出了替代板实施例1500,其被构造成围绕胫骨放置在内侧位置中。这可以适应由于如本文公开的旋转铰链轴线角θ而造成的骨铰链81的扭矩的变化。另外,此板1500的上部部分可被构造成放置在与acl隧道充分间隔开的位置,使得可能不需要复杂的几何形状开口。此示例性板1500包括下部多个孔1510和上部多个孔1515。下部多个孔1510
可以与上部多个孔1515不同的角度来定向固定构件1530。这可解释由于修改铰链轴线角和位置而在胫骨80上引起的扭转力矩。图15b和15c示出了上部固定构件1530a相对于最下部固定构件1530b的第一取向。当板适应对铰链轴线角的较大修改时,角度z可以增加。例如,对于4度的a/p矫正,根据图4c所示的图表,修改的角将为大约14.6度(与胫骨模型上所示的14度有关)。因此,被构造成用于此修改的角的板可优选地包括与围绕胫骨的内侧部分的位置匹配以减少骨铰链上的扭矩的轮廓,并且可包括用于以第一角度定向多个固定构件的上部多个通孔1510,以及用于以相对于第一角度的第二不同角度定向至少一个固定构件1530b的下部多个通孔1510。多个板可全部包括用于以第一角度定向多个固定构件的上部多个通孔,以及以相对于第一角度的第二不同角度定向至少一个固定构件的第二下部多个通孔。多个板中的每一个可以在上部多个通孔与下部多个通孔之间具有不同的角偏移z,根据修改的铰链轴线角值,所述角偏移针对沿着胫骨的不同扭转力矩进行定制。一般来说,修改的铰链轴线角越大,角偏移z越大。
[0094]
另外,板下表面部分1520可以与上部部分1525的纵向轴线l1以角度x定向。这允许在该内侧位置改善与骨表面的并置。另外,下部部分1520可以限定延伸穿过孔1210的至少两个中心轴线的纵向轴线l3,l3从板的纵向轴线l2偏移(w)。这将上部部分1525放置在截骨的胫骨上部部分的更内侧以及截骨的胫骨下侧的更前侧,以使下部柄1520沿着胫骨居中,并且抵抗由于修改的铰链轴线角而导致的胫骨上的扭转力矩。相对于适应较小的修改的铰链轴线角的板,适应较大的修改的铰链轴线角的板可具有较大值w和x。
[0095]
现在,本公开转向用于调整和增加对hto的横向骨铰链的压缩的系统1600。该系统可以适用于更传统的单平面开放楔形胫骨高位截骨以及如本文公开的双平面hto两者。增加对骨铰链81的压缩可以各种方式改善患者结果。它可以促进在hto程序期间更快的骨愈合;如果骨侧铰链在程序期间开裂,它可以减少不愈合的几率;并且它可以允许在预加载截骨时在截骨上更早地承重,这减少了在愈合过程中的损失矫正的几率。通常,该系统包括接合固定板(例如固定板1200)的装置,以及使板1200可调整地弹性弯曲或屈曲的装置。一旦板的处于此屈曲状态的部分固定到骨,骨铰链81就可以固定在此压缩状态。
[0096]
图16a示出了示例性固定板,其可以类似于本文公开的具有通过其的多个孔1210的板1200。孔1210大体上被构造成接收通过其的一系列固定装置,例如非锁定/锁定螺钉,用于将板1200附接到骨80的包括在骨的牵开部分上的部分。孔1210可以是有螺纹的。板1200是示例性形状,并且孔1210的数量和位置可以不同。系统1600包括在间隔开的位置处,优选地在两个位置处接合板1200的装置,一个位置朝向板1200的上端,一个位置朝向板的下端。在此实施例中,第一轴1610a可以螺纹方式联接到位于板的上端处的孔1210a。第一轴1610a可以是第一钻引导件1610a。孔1210a设置在截骨的上侧上,并且可以设置在截骨与其它定位在更上侧的固定孔1210d之间。可以是第二钻引导件1610b的第二轴可以螺纹接合穿过板1200的孔1210b,孔1210b朝向板1200的下端设置在截骨的下侧上。孔1210b可以是板1200上最下方的孔。优选地,在孔1210a与1210b之间存在至少一个固定孔(例如孔1210c),使得固定装置可以延伸穿过孔1210c,并且在处于屈曲或应力构型时固定板1200。优选地,屈曲主要沿着板的纵向轴线。钻引导件1610a、1610b都可以允许钻尖端穿过其中,并且因此可以被插管以将钻尖端的取向引导到骨80中。钻引导件1610a和1610b可包括螺纹接合对应螺纹孔1210的尖端。这些螺纹尖端可以延伸穿过相关联的孔1210并且超出相关联的孔,从
而在板1200的面向骨的表面1240与骨80之间提供隔开。隔开距离可以在1mm与5mm之间。图16b示出了延伸通过固定孔1210并超出固定孔的钻引导件1610a和1610b。由于仅钻引导件形成高达5mm的隔开,在通过孔1210c固定板时可以实现一些有限压缩。然而,骨上的额外压缩可能是有益的。
[0097]
现在转到图16c,系统1600还包括向板1200赋予额外屈曲的工具1650。外部压缩工具1650可接合轴1610a和1610b并且使板1200屈曲。外部压缩工具1650可以在使用期间设置在患者外部,其中两个轴1610a和1610b延伸穿过皮肤切口。通常,压缩工具1650被构造成接合两个轴1610a和1610b并且移动每个轴的轴线以便使板1200屈曲。实现这一点有多种方式。例如,外部压缩工具1650可以是远离轴1610的纵向轴线横向延伸的枢转夹具或钳式工具。工具1650接合钻引导件1610a和1610b,并且旋转每个轴的纵向轴线以在板上施加应力并使板1200弹性屈曲。在此示例性系统1600中,工具远端1652至少部分地环绕每个钻引导件1601a和1610b。挤压手柄端1655使两个钻引导件纵向轴线相对于彼此旋转,并且在板1200上赋予纵向屈曲。手柄端1655可包括维持屈曲状态的装置。示出了棘轮装置1657。每个连续的棘轮齿增加板1200上的应力,并由此增加骨铰链81上的压缩。在其它实施例中,螺纹构件可以可操作地联接到手柄端1655并且在手柄端之间,使得螺纹构件的致动可以调整手柄之间的距离,以使轴纵向轴线相对于彼此移动,并且在板1200上赋予纵向屈曲。在一些实施例中,每个轴1610的纵向轴线可以从彼此大致平行旋转到非平行。工具1650的其它示例性实施例可插入钻引导件1610的每个插管端中。工具1650可以从轴1610a和1610b纵向延伸。工具1650可以包括直接在两个轴1610a和1610b之间延伸的棘轮机构,并且用户可以将两个轴手柄端朝向彼此挤压以接合棘轮上的一组连续齿。替代地,螺纹构件可以在两个轴1610a与1610b之间延伸,并且致动螺纹构件可以改变两个轴1610a与1610b之间的距离。图16d示出了骨80上的板1200,其中系统1600接合板1200并且使该板弹性屈曲。板1200可以在松弛状态下与线p对准,并且在经由工具1650并且经由钻引导件1610a和1610b使板屈曲时,板1200可以弹性屈曲以与线q对准。当板以这种形状屈曲时,通过孔1210c放置固定装置比板较不屈曲或处于松驰状态时在骨铰链81上施加更高的压缩。
[0098]
因此,在图17a-17c中示出了可调整地压缩骨铰链81的方法。固定板1200可以放置在目标骨80上牵开的任一侧。板的上部部分可以使用引导件1690和锁定螺钉与骨80固定在一起。可以是钻引导件1610a和1610b的轴可以联接到板1200,并且可以延伸穿过板1200的面向骨的表面1240并超出该面向骨的表面,以使板1200与骨外表面远离间隔。钻引导件各自限定纵向轴线且具有限定手柄端的长度,使得每个钻引导件1610可手动与板接合,并且钻引导件中的至少一个可用于处理骨,并将板1200放置在骨80上。上钻引导件1610a可以延伸穿过形成在患者中的切口以放置板。第二最小切口可以在更下部形成以允许第二钻引导件1610b接近板1200。钻引导件1610与板1200之间的两个分立连接位置可以是优选的以减小通过患者皮肤的切口尺寸。第一钻引导件1610a可以通过孔1210a联接,所述孔设置在最上部孔与牵开骨之间。第二钻引导件1610b可以联接到孔1210b,所述孔是板1200的最下部孔。外部压缩工具1650可以接着接合钻引导件1610a和1610b,并且在穿过孔1210c放置固定装置之前被操作以使板1200弹性屈曲,以便压缩骨80的侧向铰链82。工具1650可以具有一系列设置以使板1200可调整地屈曲,并且由此可调整地压缩铰链81。在经由孔1210c固定之后,接着可释放工具1650(图17c)。然后,可使用钻引导件1610a和1610b沿着目标轨迹引导
钻。然后,可以移除钻引导件1610a和1610b,并且板1200经由孔1210和1210(未示出)进一步固定到骨上。可以仔细规划对板1200施加应力,使其精确和准确到临床需求的程度。
[0099]
图18a示出了放置在已经被牵开的胫骨上的另一示例性实施例板1800,其中多个单轴线孔1810穿过胫骨以接收通过其的固定构件。板1800可以是不对称的“t”形状。孔1810大体上被构造成接收通过其的一系列固定构件1805,例如非锁定/锁定螺钉,以将板1800附接到胫骨80的可包括在牵开的截骨上的部分。板1800限定成形为接合骨的第一表面1840以及相对的外表面1845,在第一表面与外表面之间限定板厚度。与板1200不同,板1800可以不包括复杂孔口1220,而是可以包括两个单独的孔1810a和1810b,这两个单独的孔在板1800的上端上彼此直接相邻。两个孔1810a和1810b可以具有彼此平行的轴线,或如图所示可以彼此成角度地偏移。在此示例性实施例中,孔1810a可以具有正交于板1800的轴线,并且可以平行于与其直接相邻的其它孔。孔1810b可以限定从孔1810a的中心轴线角偏移约15角度(
°
)的中心轴线。这两个孔1810a、1810b被构造成提供允许固定构件1205采用避开acl隧道87或87’的穿过胫骨的路径的至少一个孔1810a或1810b。然而,不同于复杂孔口,固定构件1205还可以同时延伸穿过两个孔(1810a、1810b)(如果解剖结构允许),因此总体上增加了板固定。图18b示出了放置在胫骨80上的更靠前位置中的板1800,其中固定构件1205优选地穿过孔1810b而非孔1810a放置,以避开acl隧道87或87’。先前解释过,出于扭矩考虑,优选地将固定板直接放置成与铰链轴线相对,并且因此可将板放置在更前面,以便铰链轴线在增加胫骨平台斜率的方向上旋转,如图4d中所示。没有固定构件1205穿过孔1810a放置。替代地,图18c示出了放置在胫骨80上的更内侧位置中的板1800,其中优选地将固定构件1205穿过孔1810a而非孔1810d放置,以避开acl隧道87或87’。这可以与减小胫骨平台斜率的双平面矫正相关,如图4c中所示。没有固定构件1205穿过孔1810b放置。返回图18a,取决于伴随的手术和acl的位置,两个孔1810a和1810b均可接收通过其的固定构件1205,以增加与胫骨80的固定。因此,两个孔(1810a、1810b)包括沿着第一轴线延伸的第一孔,所述第一孔将固定构件放置在第一固定取向中,以及沿着第二轴线延伸的第二单独孔,所述第二单独孔将固定构件1205放置在第二固定取向中,所述第二固定取向不同于第一取向。第一轴线与第二轴线之间的角度可以至少部分地鉴于围绕胫骨的板位置来限定,所述板位置可以至少由修改的铰链轴线角限定并且还基于通过胫骨的acl隧道的位置来构造。
[0100]
以上讨论旨在说明本发明的原理和各种实施例。一旦完全理解上述公开内容,许多变化和修改对于本领域技术人员来说将变得显而易见。旨在将以下权利要求书解释为包括所有这样的变化和修改。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1