利用连续KV射束获取的锥形射束计算机断层成像的制作方法
利用连续kv射束获取的锥形射束计算机断层成像
技术领域
1.本公开总体涉及放射成像和处理。特别地,描述了利用连续千伏(kv)射束获取的锥形射束计算机断层成像(cbct)的各种实施例。
背景技术:
2.计算机断层成像(ct)在医学成像和放射治疗中是已知的,并且已经证明针对多个临床应用是有用的工具。在执行计算机断层成像时,放射源从多个角度向对象的部分发射x射线,以及检测器检测通过对象的部分的放射以获取投影数据。使用重建算法来重建所获取的投影数据,以在对象的部分的二维图像切片或三维图像体积中生成断层成像图。
3.常规cbct在投影数据的获取中使用脉冲射束。放射源以预定频率发射射束脉冲,以及检测器检测由通过成像部分传输的射束脉冲生成的信号。脉冲的发射和传输的脉冲的检测被顺序地操作。在检测传输的脉冲期间,没有脉冲被递送到躯干部分。
4.利用脉冲射束获取的常规cbct显著地限制了放射源的占空比,在放射源操作产生放射期间的部分。例如,在利用脉冲射束操作的kv-cbct中,kv源的占空比可以被限制在30-40%。针对大的占空比,在投影数据的获取中由于射束脉冲发射和传输的射束的检测的顺序操作,脉冲射束ct降低了检测器的最大可能的帧速率。此外,脉冲射束可以使测量不准确,因为射束输出实际上不能在脉冲结束时立即停止,而是可以花费几毫秒直到强度降至零。这种所谓的尾端效应可以产生成像伪影,当使用短脉冲时该成像伪影可以相对大。
5.因此,继续需要改进的计算机断层成像以缓解常规cbct的问题。希望提供允许放射源以100%的占空比操作的cbct方法和系统。希望提供使用连续射束以快速获取投影数据并且生成具有改进的图像质量的经重建的图像的cbct方法和系统。
技术实现要素:
6.公开了一种使用连续kv射束获取的cbct方法。该方法包括使用放射源和区域检测器来获取对象的至少部分的多个投影,其中在获取多个投影的数据集中,源利用锥形放射射束从多个角度连续地照射对象的部分,以及区域检测器在利用锥形放射射束连续照射对象的部分期间读出数据。基于多个投影的数据集的至少部分来构造对象的部分的断层成像图图像。
7.公开了一种cbct系统。系统包括放射源、与放射源同步可移动的区域检测器和图像处理设备。放射源可操作以产生锥形放射射束,并且相对于对象可移动以从多个角度照射对象的至少部分。区域检测器可操作以获取对象的部分的多个投影,同时源利用锥形放射射束从多个角度连续地照射对象的部分。图像处理设备被配置为基于多个投影的数据集的至少部分来重建对象的部分的断层成像图图像。
8.提供本发明内容以简化的形式介绍经选择的实施例,并且不旨在标识所要求保护的主题的关键特征或基本特点,也不旨在用作帮助确定所要求保护的主题的范围。经选择的实施例仅向读者提供本发明可以采取的某些形式的简要概述,并且不旨在限制本发明的
范围。本公开的其他方面和实施例在具体实施方式的部分中被描述。
附图说明
9.通过结合附图阅读下面的详细描述和所附权利要求书,将更好地理解本公开的这些和各种其他特征和优势,其中:
10.图1描绘了根据本公开的实施例的示例放射系统。
11.图2是根据本公开的实施例的预处理方法的示例暴露时间图。
12.图3示出了根据本公开的实施例由标准cbct重建生成的体模(phantom)图像。
13.图4示出了根据本公开的实施例由迭代的cbct重建生成的体模图像。
14.图5示出了根据本公开的实施例由标准cbct重建生成的躯干体模图像。
具体实施方式
15.参考图1至图5,现在将描述cbct方法和系统的各种实施例。通常,示例cbct方法使用连续锥形放射射束和区域检测器以执行投影数据的快速获取。获取的投影数据被重建以生成图像质量优于或至少与使用脉冲射束的常规cbct可比较的断层成像图图像。在断层成像图图像的重建之前,获取的投影数据可选地被预处理以校正或补偿由利用连续射束和区域检测器获取引起的可能的几何误差。
16.根据本公开的实施例,利用连续射束和区域检测器的投影数据获取有效地提高了放射源的占空比,从目前常见的30%至40%占空比提高到100%占空比。因此,可以在有限的时间跨度期间递送增加的kv成像剂量。在放射治疗(rt)机器上的常规kv-cbct获取中,脉冲射束操作表示kv源占空比从通常的30%至最大的40%,例如,在kv脉冲长度是20毫秒(ms)并且成像器以15帧每秒(fps)操作的获取中,或者在kv脉冲长度是10ms并且成像器以30fps操作的获取中。针对给定的源功率,脉冲操作限制了在给定时间周期期间可以被递送的剂量或mas暴露的总量。毫安秒或mas是经由x射线管在时间(秒)的设定数量上产生的放射(毫安)的度量单位。随着根据本公开的连续kv射束操作,100%源占空比允许在相同时间内递送大约2.5倍的更多剂量。
17.作为示例,在常规kv-cbct扫描中(例如,骨盆扫描)针对具有1080mas的总剂量的900个投影的获取,使用以125kv、20ms射束脉冲长度、60ma脉冲电流操作的x射线管和以15fps操作的成像器,总共18秒射束时间需要60秒长的扫描时间。根据本发明的实施例,利用以相同电流(60ma)的连续射束,相同的剂量数量(1080mas)可以在18秒内被递送。
18.作为另一示例,允许用于处理递送的台架在少于17秒内旋转360
°
的放射处理(rt)机器已经被开发。然而,针对在这种rt机器上的cbct,目前具有最高剂量(例如,骨盆大)的cbct扫描模式要花费更长的时间(41秒)以被递送,主要是由于cbct源的有限的占空比(40%至50%)。
19.利用连续射束的投影数据的获取还提高了诸如平板成像器的区域检测器的有效检测速度。针对平板成像器的给定读出时间,最大帧速率可以被增加。与常规的脉冲射束操作相反,其中kv射束脉冲的发射和成像器帧的读出被顺序地构建,利用根据本公开的连续
射束操作,成像器帧的读出实际上可以在之前的帧的读出结束之后立即开始。通过示例的方式,在具有20ms kv射束脉冲和20ms成像器读出时间(40ms循环时间)的脉冲射束操作中,成像器以25fps的帧速率操作。利用根据本公开的连续射束操作,具有相同读出时间(20ms)的成像器允许50fps(20ms循环时间)的帧速率。
20.利用连续射束和区域检测器的投影数据的获取可以增加诸如x射线管(灯丝)的放射源的使用期。例如,kv管的使用期被增加因为给定剂量可以以较低的连续电流而不是在具有高峰值电流的短脉冲中被递送。
21.利用连续射束的投影数据的获取避免了kv脉冲尾端效应。在常规的脉冲射束操作中,射束输出不是在脉冲结束时立即停止,而是可以花费几毫秒直到射束强度降至零。该所谓的尾端可以影响测量准确度。针对短脉冲,尾端对总体信号或患者剂量的贡献可以变得相对大。根据本公开的利用连续射束的获取极大地降低了与脉冲尾端相关的影响。
22.利用连续射束的投影数据的获取还减少了cbct重建中的混叠(alias)伪影。针对如台架旋转的跨图像移动的对象,具有100%占空比的暴露导致更模糊的结构。在cbct重建中,这在一定程度上降低了远离旋转轴的空间分辨率,但是有助于减少混叠(采样)伪影,否则在很短的脉冲的情况下,混叠伪影可以变得清晰可见。
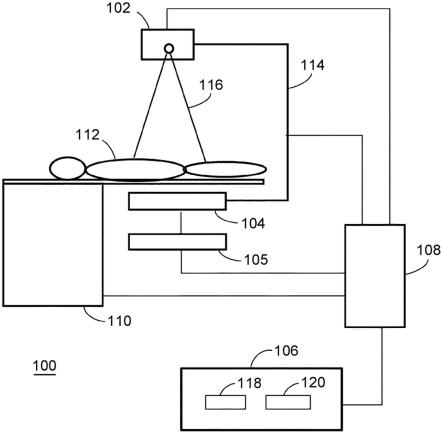
23.图1描绘了成像或放射系统100的示例,其中本公开的方法的实施例可以被实现。应当注意,虽然结合成像系统描述了本公开的实施例,但是本公开的原理可以在处理系统、模拟系统、研究和开发系统或任何包括成像功能的其他合适的放射系统中被实现。例如,本公开的实施例可以在放射处理系统中被体现,该放射处理系统包含图1中所示的成像系统,并且还包括在例如4至20mv的兆伏(mv)级可操作的源以产生适合处理的放射。
24.如图1所示,示例放射系统100总体包括放射源102、区域检测器104和图像处理设备106。放射源102、区域检测器104和图像处理设备106的操作可以由计算机和控制系统108来控制。例如处理床的支撑设备110可以将例如患者的对象112放置在源102与区域检测器104之间以接收用于成像和/或处理的放射。
25.源102与区域检测器104可以彼此相对地布置,并且由可移动或可旋转的台架114承载。因此,在从多个角度获取对象的投影期间,源102和区域检测器104可以被同步地移动。台架114可以是以本领域已知的弧度可操作的旋转源102和区域检测器104的环形台架或c形臂台架。备选地或附加地,支撑对象112的处理床110可以以多个自由度被移动,例如水平和/或垂直平移,和/或绕各种轴旋转,以在投影数据的获取之前或期间相对于源102定位对象112。
26.在特定实施例中,源102是可操作的以产生锥形放射射束116,以及通过旋转台架114来从多个角度连续地照射对象112。在利用连续锥形射束116照射期间,例如平板成像器的区域检测器104可操作以连续读出数据,允许快速获取cbct重建所需的多个投影。通常,取决于针对特定应用可接受的图像质量,cbct重建所需的投影数目的范围从400至900。然而,本公开的权利要求不限于此。针对cbct重建,大于900或小于400个投影可以被获取。
27.在特定实施例中,台架114可以以相对快的速度,例如以每分钟两个360
°
旋转或更多、或以每分钟四个360
°
旋转或更多来旋转源102和区域检测器104。在相对高速旋转期间,来自源102的锥形射束116保持开启,从多个角度连续地照射对象112,并且区域检测器104连续地读出数据,从而允许源102以100%的占空比操作。在特定实施例中,在源102的单个
360
°
旋转期间,对象112的至少部分的多个投影被获取,在该旋转期间源102连续地发射锥形射束并且区域检测器104连续地读出数据。在备选的实施例中,360
°
旋转被分成多个扇区或块,例如,分成5个扇区每个扇区都是72
°
的弧形。在多个扇区或块中的每个中,多个投影被获取,在该获取期间源102连续地发射锥形射束,并且区域检测器104连续地读出数据,允许源102以100%的占空比操作。在多个扇区或块中获取的投影数据则可以被组合,形成完整360
°
数据集。
28.在特定实施例中,源102是以千伏(kv)级(例如范围从50至150kv,具有例如在125kvp的峰值千伏(kvp))可操作的x射线管。在特定实施例中,区域检测器是具有大的有效(active)检测区域(例如,20
×
20cm2或更大、30
×
30cm2或更大、或40
×
40cm2或更大、或在20
×
20与45
×
45cm2之间的任何大小)的平板成像器。由源102产生的锥形射束116具有锥形射束角。锥形射束角可以在平板成像器的像素列和/或行的方向上被限定。通过示例的方式,针对以锥形射束为中心具有20
×
45cm2的有效检测区域的平板成像器,在成像器的像素列和行两者的方向上,锥形射束角的范围可以从7至17度。结合不同大小的区域检测器可以采用其他锥形射束角。在本公开的备选实施例中,区域检测器相对于锥形射束的中心线可以被横向偏移布置。
29.源102与区域检测器104围绕对象112的同步旋转提供了包括对象112的至少部分(例如,患者的骨盆区域)的重建体积。重建体积是通常为圆柱形的体积空间,在该体积空间上可以由cbct来重建三维图像。重建体积的直径通常被称为视场(fov)。重建体积的长度在本文中被称作扫描长度。fov的大小和重建体积的扫描长度可以取决于源102的焦点与区域检测器104的检测表面之间的距离、由源102产生的射束116的锥形角度以及区域检测器104的检测表面的大小。在特定实施例中,源102的焦点与区域检测器104的检测表面之间的距离、由源102产生的射束的锥形角度以及区域检测器104的检测表面的大小可以被选择,使得重建体积具有范围从25至50厘米或更大的fov,和/或范围从15至28厘米或更大的扫描长度。应当指出,重建体积的大小是针对说明的目的被提供的。如上文所述,区域检测器可以相对于射束(例如在半扇形配置中)被横向偏移布置,以及重建体积的fov和扫描长度可以大于或小于上文的示例值。
30.图像处理设备106可以包括计算机118和为了基于所获取的投影重建断层成像图图像而设计的软件120。各种重建软件或算法在本领域中是已知的,并且可以结合本公开的实施例被使用。例如,基于滤波修正逆投影技术(filtered back projection technique)的标准cbct重建软件可以被用于生成断层成像图图像。基于代数重建技术(algebraic reconstruction technique)的迭代的cbct重建软件也可以被用于生成断层成像图像,该软件由于计算机的计算能力的增加变成市场上可购买的。在特定实施例中,在图像处理设备106中实现的软件120可以将投影数据重建为表示对象的部分的三维体积的断层成像图图像。
31.在特定实施例中,在重建之前,获取的投影数据被预处理以解释放射射束和探测器属性以及系统电子属性。例如,获取的投影数据可以被预处理以校正检测器像素缺陷、解释电子增益或应用对数变换等。在根据本公开的特定实施例中,投影数据可以被预处理以校正或补偿由连续锥形射束和区域检测器的获取引起的几何误差或几何扭转,如下文将更详细地描述的。
32.cbct重建算法基于在台架旋转时获取的一系列投影(帧)来生成3d体积。针对多个处理步骤,目前利用的算法假定单个帧中的像素数据全部表示相同的时间。例如,像素数据的反投影假定在给定投影中针对全部图像行的相同的台架位置。如果不考虑由连续射束获取引入的系统性时间延迟,则该系统性时间延迟将生成几何误差,例如在上部行中的像素数据表示在轻微不同的台架位置期间的情况。没有校正将导致对应于轻微扭转的圆柱体的几何误差。
33.通过示例的方式,rt平台上的cbct系统可以包括具有大小或有效检测器区域为43
×
43cm2的平板成像器、20ms读出时间的帧,并且以横向偏移(半扇形配置)定位,并且提供49cm直径的cbct重建体积。如果rt平台的台架以每分钟4转(rpm)(24
°
每秒)的速度旋转,则平板成像器的读出时间将对应于在成像器的中心检测器行与顶部或底部检测器行之间10ms的时间延迟。在4rpm下,位于距等深点轴24cm处的结构(即,接近具有49cm直径的重建体积的边缘)将在旋转中的成像系统的参考的帧中,在10ms期间移动大约1mm。这意味着如果该结构被定位,使得该结构的图像被投影到顶部检测器行,则该结构的经测量的位置可以与在脉冲系统中观察到的位置相距达1mm。
34.由于锥形射束几何形状,给定的成像器行对位于体积的不同切片上的体素做出贡献,除了仅对中心切片做出贡献的成像器的中心行。针对此原因,经重建的体积的“去扭转”不能简单地通过将体积的每个切片往回旋转明确限定的小角度来补偿,这将仅表示不准确的补偿。
35.根据本公开的特定实施例,投影数据的预处理包括将在给定时间周期内获取的给定投影的数据与在给定投影之后获取的投影的数据,和/或与在给定投影之前获取的投影的数据进行加权。根据本公开的预处理方法允许使用相同的重建算法,并且因此简化了在现有cbct重建框架中该获取模式的引入。
36.图2是根据本公开的特定实施例说明预处理方法的示例暴露时间图。用于投影数据的获取的区域检测器104是平板成像器,包括在列和行(行的总数目被指定为h)中的多个检测器像素。在图2中,垂直轴表示检测器行;水平轴表示时间。针对给定投影(索引i)的获取,检测器像素的读出从在时间t0处的第一行开始(索引y=0),然后在t1处的第二行
…
在tc处的中心行,直到在th处的最后一行结束。在连续的行的读出之间(例如,在第一和第二行,t1与t0之间)过去的时间在本文中被称为行读出周期(linetime)。成像器读出全部行所花费的时间在本文中被称为检测器读出时间。在所示的示例中,检测器读出时间可以近似地由linetime乘以行的数目给出。
37.在给定投影(索引i)的读出之后,下一投影(索引i+1)的读出在时间t’0处开始,持续到在t’c处的中心行,直到完成投影的最后一行。在连续的投影或帧的读出之间过去的时间被称为周期或循环时间(t)。循环时间可以由检测器帧速率来确定(t=1/帧速率)。针对连续的kv射束,循环时间还表示在此期间kv射束信号在像素中被累积(集成)的总时间(暴露时间)。针对所有检测器行循环时间是相等的。最短的循环时间(最快的帧速率)可以由检测器读出时间来确定,但是循环时间也可以比检测器读出时间长得多。
38.与给定投影相关联的时间戳和诸如台架的角位置的获取参数相对于检测器的中心像素行被限定。预处理的一个目的是生成投影数据,其中所有像素行对应于相同的时间(和台架位置),例如由检测器的中心行来任意限定。在图2所示的图中,针对给定的投影i,
第一行早于中心行被读出。根据本发明的特定实施例,投影i的预处理可以使用下一投影(索引i+1)的像素数据用于线性内插。原始数据的权重(w)可以由相对时间延迟确定。同样地,针对给定的投影i,最后一行晚于中心行被读出。因此,投影i的预处理还可以使用先前投影(索引i-1)的像素数据用于线性内插。原始数据的权重(w)可以由相对时间延迟确定。通过示例的方式,可以基于相对于区域检测器的参考行(y0)读出给定行(y)的数据的时间延迟。
39.在特定实施例中,给定投影的像素数据的加权基于如下线性内插来执行:
40.将pi(..,y)替换为:
41.w*pi(..,y)+(1-w)*pi+1(..,y),其中
42.pi(..,y)表示由区域检测器获取的包括h行像素并且y《h/2的给定投影i的行y处的像素的数据值,
43.pi+1(..,y)表示投影i+1的行y处的像素的数据值,以及
44.w表示加权因子,并且w=1-(h/2-y)*(linetime/cycletime),或者
45.将pi(..,y)替换为:
46.w*pi(..,y)+(1-w)*pi-1(..,y),其中
47.pi(..,y)表示由区域检测器获取的包括h行像素并且y>h/2的给定投影i的行y处的像素的数据值,
48.pi-1(..,y)表示投影i-1的行y处的像素的数据值,并且
49.w表示加权因子,并且w=1-(y-h/2)*(linetime/cycletime)。
50.现在将结合工作的示例描述本公开的实施例。应当指出,虽然在工作的示例中阐述了一些具体细节,以便提供对本公开的透彻理解,但对于本领域的普通技术人员来说清楚的是,这些特定细节中的一些细节可以不被用于实践本公开的实施例。在其他实例中,为了避免不必要地遮蔽本公开的实施例,可以不描述一些众所周知的细节。
51.示例
52.利用连续kv射束的cbct和具有脉冲kv射束的cbct在装备有cbct系统的放射处理(rt)机器上被评估,该放射处理(rt)机器可从位于加利福尼亚州帕洛阿托市的瓦里安医疗系统公司(varian medical systems,inc.in palo alto,california)获得。cbct系统包括以125kvp操作的x射线管和具有1280
×
1280像素以及43
×
43cm2的有效检测器区域的平板成像器。平板成像器以像素混合模式(1
×
4)或1280
×
320像素分辨率被读出。在评估中使用了体模,504和躯干体模(body phantom)从位于纽约州塞勒姆市的体模实验室获得(phantom laboratory in salem,new york)。扫描在顺时针和逆时针两个方向上被执行以用于几何准确性测试。针对利用连续kv射束获取的cbct,x射线管以100%占空比被操作。针对利用脉冲kv射束获取的cbct,x射线管以大约30%占空比或更低的占空比被操作。一些其他操作参数被列在表1中。
53.表1:操作模式和参数
54.[0055][0056]
示例1(表1中的示例1)被设计为测试连续kv射束生成的结果是否比得上或优于使用平板成像器的相同帧速率的脉冲射束获取的结果。如表1所示,在示例1(示例1)中,在连续射束和脉冲射束获取中被递送到体模的总剂量实际上是相同的,均为大约498mas。获取的投影的总数目也是相同的,均为491。投影上的单个像素的灰度等级的计数或值也是相同的。图3示出了在表1中所述针对示例1(示例1)的操作参数下,在左上部基于用脉冲kv射束获取的投影数据通过标准cbct重建生成的体模图像、在上部中心基于用连续kv射束获取的投影数据来生成的体模图像。图4示出了由迭代cbct(icbct)重建生成的体模图像。图4中左上部和上部中央的体模图像显示与图3中的结果相似的结果。图5示出了由标准cbct重建生成的躯干体模图像。在表1中所述针对示例1的操作参数下,图5在左上部示出了基于用脉冲kv射束获取的投影数据通过标准cbct重建生成的躯干体模图像,在顶部中心上基于用连续kv射束获取的投影数据来生成的躯干体模图像。图3至图5中经重建的图像显示,连续kv射束获取生成的结果优于或至少与脉冲射束获取生成的结果一样好。
[0057]
示例2(表1中的示例2)被设计为测试使用连续kv射束的快速获取生成的结果是否比得上或优于脉冲射束获取的结果。如表1中所示,在示例2中,在连续射束和脉冲射束获取中递送到体模的总剂量实际上是相同的,均为大约498mas。一个差异是使用连续射束获取,平板成像器以快得多的读出速度被操作,大约49帧每秒,行时间大约57.66μs,读出时间大约19.2ms,以及循环时间大约20.48ms。因此,利用连续射束获取,较高的帧或投影的总数目(811)被读出,但是每个投影上的计数较低。然而,连续kv射束获取生成的结果(具有条纹和噪声的图像质量)仍然优于或至少与由脉冲射束获取产生的结果一样好,如图3至图5所示。图3示出了在表1中所述针对示例2的操作参数下,在左上部基于使用脉冲kv射束获取的投影数据通过标准cbct重建生成的体模图像、在右上部基于用连续kv射束获取的投影数据生成的体模图像。图4示出了通过icbct重建生成的体模图像。图4中左上部和右上部的体模图像显示了与图3中的结果相似的结果。图5示出了通过标准cbct重建生成的躯干体模图像。图5在表1中所述的操作参数下,在左上部示出了基于用脉冲kv射束获取的投影数据通过标准cbct重建生成的躯干体模图像、在右上部基于用连续kv射束获取的投影数据生成的躯干体模图像。
[0058]
示例3(表1中的示例3)被设计为测试使用以100%占空比操作的源的获取是否直接减少了扫描时间。如表1所示,在示例3中,操作参数被调整,从而近似相同的总剂量(利用连续射束为595mas对利用脉冲射束为601mas)被递送到体模。近似相同的投影的总数目被获取(利用855个连续射束对利用859个脉冲射束),其中投影上的计数也是相似的。总扫描时间显著地从利用脉冲射束获取的大约30.8秒减少到利用连续射束获取的大约17.5秒,即使用于连续射束获取的x射线管电流小于用于脉冲射束获取的x射线管电流的一半(使用连续射束为34ma对使用脉冲射束为70ma)。然而,如图3至图5所示,连续kv射束获取生成的结果仍然优于或至少与脉冲射束获取生成的结果一样好。在表1中所述针对示例3的操作参数下,图3中在左下部示出了基于用脉冲kv射束获取的投影数据通过标准cbct重建生成的体模图像、在右下部基于用连续射束获取的投影数据生成的体模图像。图4是通过icbct重建生成的体模图像。图4中在左下部和右下部的体模图像显示与图3中的结果相似的结果。图5示出了通过标准cbct重建生成的躯干体模图像。在表1中所述针对示例3的操作参数下,图5在左下部示出了基于用脉冲kv射束获取的投影数据通过标准cbct重建生成的躯干体模图像、在右下部基于用连续kv射束获取的投影数据生成的躯干体模图像。
[0059]
回到图1,放射源102可以是可操作的源以产生光子,质子或其他重离子以及电子。通过示例的方式,源102可以包括x射线管,该x射线管包括基于电子撞击来生成x射线的目标。x射线管102可以包括准直器设备以准直射束,使得射出x射线管的射束通常呈圆锥形或角锥形。作为另一示例,源102可以包括线性加速器,该线性加速器包括基于电子撞击来生成x射线的目标,以及用于将x射线塑形和/或调整大小的各种准直设备。作为另一示例,源102可以包括发射质子的射嘴,该质子由回旋加速器或同步加速器产生并被传输到射嘴。通常,源102可以产生或发射适合于成像的放射。备选地,源可以在例如范围从50至150kv的千伏级操作,以产生适合于诊断成像的放射。备选地,源可以在兆伏级(mv)被操作,用于与例如电子视场成像装置(epid)一起使用以获取图像,例如用于确定患者设置或用于介入处理
或处理计划迭代。在一些实施例中,源102可以是在两个或更多个模式下可操作的源,例如在kv或mv能量级以产生用于各种应用的放射。
[0060]
在特定实施例中,源102包括可操作的x射线管以产生x射线。x射线管在本领域中是已知的并且因此在本文中省略了其详细描述。简短地并且通常,x射线管包括电子的源(阴极)(例如,灯丝)和在封闭在真空管中的旋转台上的目标(阳极)(例如,钨金属)。电流的供应使得灯丝被加热产生电子。应用于真空管的电压加速电子朝向阳极撞击目标以产生x射线。在产生x射线的目标上的小的表面区域被称为x射线管或源的焦点,该焦点的大小可以由来自阴极的电子射束确定。产生的x射线则可以由准直器塑形并且通过管中的窗口射出。虽然在图1中未示出,但是x射线控制器和生成器组信号(例如电流、电压、暴露时间)和其他x射线管的操作参数,以及生成将被供应给x射线管的电压。x射线控制器和生成器可以转而由计算机和控制系统108控制。
[0061]
仍然参考图1,区域检测器104检测通过对象112的传输的放射,其指示衰减特性或对象112的成像部分的结构。区域检测器104与数据获取系统105相耦合,该数据获取系统105包括用于提供控制信号、接收和处理数据信号以及向图像处理设备106输出数据的电子电路。虽然在图1中所示为分离的单元,但是数据获取系统105和区域检测器104可以被集成为由计算机和控制系统108控制的单个单元。
[0062]
区域检测器104包括在二维区域中以行和列布置的多个检测元件。在特定实施例中,区域检测器104包括具有平坦检测器表面的平板成像器。在备选的实施例中,区域检测器104具有弯曲的检测器表面。区域检测器104可以具有有效检测区域或大小例如从20
×
20cm2至大约45
×
45cm2。各种区域检测器可从位于犹他州盐湖城市的万睿视成像公司(varex imaging corporation in salt lake city,utah)获得。
[0063]
在本公开的特定实施例中,区域检测器104是平板成像器。平板成像器可以包括放射转换层和检测器阵列。转换层将诸如x射线光子的放射转换为可见光。检测器阵列检测可见光并且将其转换为电信号。转换层可以包括可以响应于x射线放射生成可见光光子。因此,检测器阵列可以包括光敏元件,该光敏元件可以响应于由闪烁体材料生成的可见光子而生成电信号。合适的闪烁体材料包括硫氧化钆(gd2o2s:tb)、钨酸镉(cdwo4)、锗酸铋(bi4ge3o
12
或bgo)、碘化铯(csl)、碘化铯铊(csl:tl)、铊掺杂的碘化钠(ti)或其任意组合。合适的光敏元件可以包括光电二极、光电栅或光电晶体管等。备选地,转换层可以包括光电导体材料,该光电导体材料可以将x射线光子直接转换为电荷(电子空穴对)。因此,检测器阵列可以包括在光电导体材料的任一侧的电极,以收集由光电导体材料生成的电荷。合适的光电导体材料包括但不限于碘化汞(hgl2)、碘化铅(pbl2)、碘化铋(bil3)、碲化镉锌(cdznte)、无定形硒(a-se)等。
[0064]
在特定实施例中,示例平板成像器104可以包括大量(例如,几十万或百万)检测器像素。大量检测器像素可以被布置为形成有效检测器区域的多个行和多个列。在一些特定实施例中,每个检测器像素可以包括诸如光电二极管的可寻址的光敏元件以及诸如薄膜晶体管(tft)或互补金属氧化物半导体(cmos)晶体管的开关晶体管。
[0065]
检测器阵列还可以包括多个地址线和多个数据线。多个地址线中的每个地址线可以将行中的多个检测器像素连接到数据获取系统的驱动器控制组件。多个数据线中的每个数据线可以将列中的多个检测器像素连接到数据获取系统105的读出控制组件。驱动器控
制组件提供用于访问经选择的像素行的控制信号。读出控制组件提供用于从像素中读出信号的控制信号。通过示例的方式,在希望从检测器阵列捕获图像信号时,来自驱动器控制组件的控制信号驱动经选择的像素行中例如tft的切换元件的栅极,并且存储在经选择的像素行中的信号由读出控制组件读出。来自经选择的像素的信号可以使用数据获取系统105的电子由模数转换器(adc)来缓冲、放大和转换。产生的数字化数据信号则可以被多路复用、缓冲,以及被传输到用于进一步处理的图像处理设备106。
[0066]
在检测器阵列的操作中,针对像素行的来自驱动器控制电路的控制信号可以在地址线上断言针对预定的时间周期或行时间。在控制信号断言期间,来自经选择的行中的每个像素的信号经由列数据线被传输到读出控制电路,其中每个数据线上的信号由对应的电荷敏感放大器接收和缓冲。因此,整行图像数据可以在行时间周期内被捕获。针对每个后续行时间周期,图像数据的后续行被捕获。在“帧时间”周期结束时,整个图像可以被捕获。以此方式,被包括在整个有效检测区域中的像素可以在行时间周期中逐行地读出每个行。在备选的实施例中,平板成像器可以使用分开的数据线,其中阵列的上半部和阵列的下半部被同时读出。这允许平板成像器更快地读出,例如,仅需要“帧时间”的一半时间以读出像素。因此,上述投影数据的预处理可以根据在这种读出方案中实现的特定读出时序来调整。通过示例的方式,平板成像器可以以范围从15至50帧每秒(fps)的速度操作,取决于剂量要求、图像分辨率和获取的投影数据集的数目。
[0067]
仍然参考图1,图像处理设备可以包括计算机118和软件120,该软件120被设计为处理获取的投影数据并且基于投影数据来重建断层成像图图像。计算机118可以包括处理器,存储器,可选的用户接口和网络接口。处理器可以包括本领域公知的中央处理单元(cpu),诸如处理器或处理器,或图形处理单元(gpu),诸如gpu,或其他类型的处理单元。处理器可以从存储器检索和执行计算机可执行指令,该计算机可执行指令可以使得处理器执行根据上文所述本公开的实施例的任何方法和/或步骤。
[0068]
存储器可以包括易失性存储器元件和非易失性存储器元件中的任何一个元件或组合。存储器可以包括随机存取存储器(ram)或其他动态存储设备,用于存储由处理器执行的信息和指令,以及用于在由处理器执行指令期间存储临时变量或其他中间信息。存储器还可以包括只读存储器(rom)或其他静态存储设备,用于存储静态信息以和针对处理器的指令。存储器还可以包括诸如磁盘或光盘的数据存储设备,用于存储信息和指令。存储器(例如,非暂态计算机可读介质)可以包括用于操作计算机系统和用于执行包括如上文所述的剂量测定的投影和剂量计算的应用或其他处理计划应用的程序(逻辑)。此外,存储器可以包括存储可以由用户(诸如,放射肿瘤医师或放射处理师)选择的任何信息的数据库。
[0069]
用户接口设备可以包括用户与计算机系统交互的组件,诸如键盘、指点设备、笔,触摸输入设备、语音输入设备等。诸如显示设备、打印机、扬声器等的输出设备也可以被包括在计算机系统中。
[0070]
网络接口允许计算机系统通过诸如互联网或内联网(例如,局域网)的通信网络与其他设备或系统通信。网络接口可以包括wi-fi接口,以太网接口,蓝牙接口或其他无线或有线接口。网络接口允许计算机系统接收和发送承载表示各种类型信息的数据流的电、电磁或光信号。例如,网络接口可以允许计算机系统通过通信网络接收表示用于处理计划的软件程序的数据流。
[0071]
参考附图,cbct方法和系统的各种实施例被描述。应当注意,一些附图不必然是按比例绘制的。附图仅旨在便于描述特定的实施例,并且不旨在作为穷举性的描述或作为对本公开范围的限制。
[0072]
除非另有具体定义,本文中使用的所有技术和科学术语具有本领域普通技术人员通常理解的含义。如在说明书和所附权利要求书中使用的,单数形式的“一”、“一个”和“该”包括多个引用,除非上下文另外清晰地指出。术语“或”指代非排他的“或”,除非上下文清晰地另外指出。术语“第一”或“第二”用于在描述各种相似的元素时将一个元素与另一个元素区分开,并且除非上下文另外明确指出,否则不应被解释为以任何特定的顺序。
[0073]
本领域技术人员将认识到,可以进行各种其他修改。所有这些或其他变化和修改都是由本发明人设想到的,并且都在本发明的范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1