一种急救科用心肺复苏抢救辅助设备的制作方法
1.本发明涉及一种辅助设备,尤其涉及一种急救科用心肺复苏抢救辅助设备。
背景技术:
2.医院是对患者进行救治的地方,在医院中抢救任务最重以及病重人员最多的科室是急救室,心肺复苏术是对病人心脏骤停和停止呼吸时所采取的一种救命技术,是为了患者能自主进行呼吸以及心脏跳动,若是患者的心脏骤停,如得不到即刻及时地抢救复苏,就会造成患者脑和其他人体重要器官组织的不可逆的损害,甚至死亡,当在急救科的科室中需要对病人心肺复苏时,一般采用的是人工使用复苏工具对病人的心肺进行按压,人工按压比较难把握按压的节奏,且因人力因素容易出现按压过猛的情况,容易对病人造成危害。
3.因此,根据上述出现情况,市场上需要设计出一种操作便捷、组装方便以及能自动对病人的心肺进行按压的急救科用心肺复苏抢救辅助设备。
技术实现要素:
4.本发明的目的在于提供一种操作便捷、组装方便以及能自动对病人的心肺进行按压的急救科用心肺复苏抢救辅助设备,能够解决上述背景技术中提出的人工使用复苏工具对病人的心肺进行按压,人工按压比较难把握按压的节奏,且因人力因素容易出现按压过猛的情况,容易对病人造成危害的缺点。
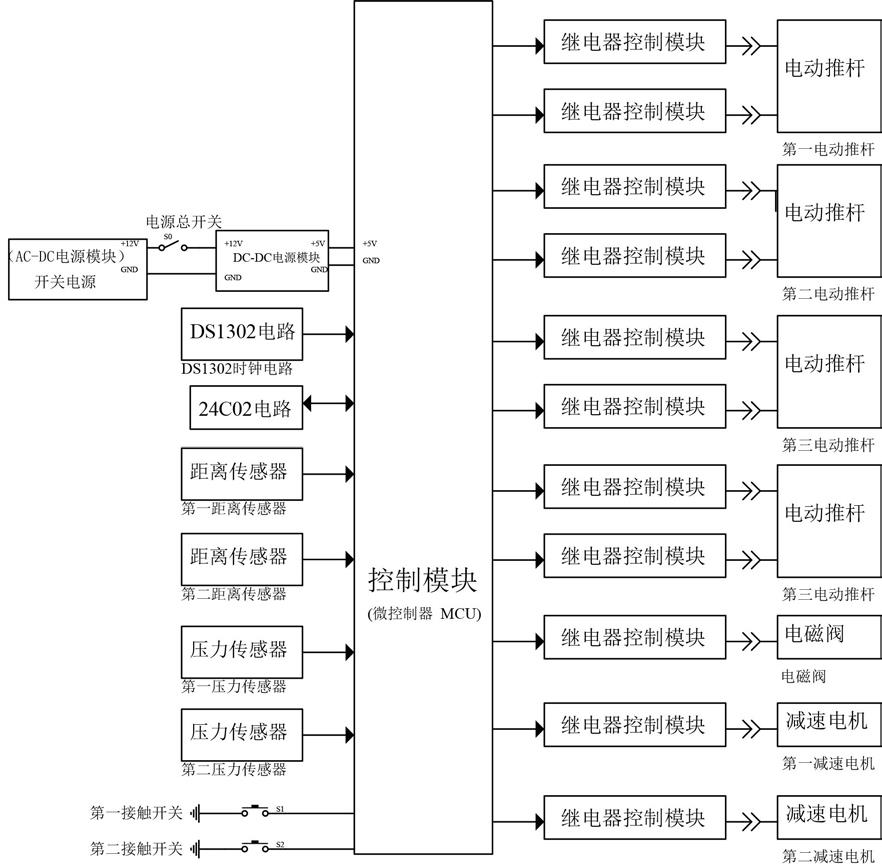
5.本发明的技术实施方案为:一种急救科用心肺复苏抢救辅助设备,包括:固定板和延长板,固定板上设有延长板;枕头,固定板中间设有枕头;第一压力传感器,枕头顶部中间设有第一压力传感器,第一压力传感器与控制模块通过电性连接;定位机构,延长板上设有定位机构;控制箱,定位机构上安装有控制箱,控制箱安装有开关电源、控制模块和电源模块,开关电源为整个辅助设备供电,开关电源的输出端与电源模块通过电性连接,电源模块上通过线路连接有电源总开关,控制模块和电源模块通过电性连接,控制模块上连接有ds1302时钟电路和24c02电路;第一接触开关,控制箱顶部设有第一接触开关,第一接触开关与控制模块通过电性连接;第二接触开关,控制箱顶部设有第二接触开关,第二接触开关与控制模块通过电性连接;按压机构,定位机构上设有按压机构;按压板,按压机构上设有按压板。
6.有益地,定位机构包括:第一安装板,固定板上设有第一安装板,第一安装板顶部与控制箱连接;
第一减速电机,第一安装板底部安装有第一减速电机,第一减速电机与控制模块通过继电器控制模块连接;第一电动推杆,第一减速电机的输出轴上设有第一电动推杆,第一电动推杆与控制模块通过继电器控制模块连接;安装台,第一电动推杆的伸缩杆上设有安装台。
7.有益地,按压机构包括:第二电动推杆,安装台内部安装有第二电动推杆,第二电动推杆与控制模块通过继电器控制模块连接;第一推板,第二电动推杆的伸缩杆设有第一推板;伸缩杆,第一推板底部两侧均设有伸缩杆,两个伸缩杆底部均与按压板连接;弹簧,两个伸缩杆上均绕有弹簧,弹簧两端分别与第一推板和按压板连接;第一距离传感器,按压板底部设有第一距离传感器,第一距离传感器与控制模块通过电性连接;第二压力传感器,按压板底部设有第二压力传感器,第二压力传感器与控制模块通过电性连接。
8.有益地,还包括有导向机构,导向机构包括:第二安装板,延长板底部两侧均设有第二安装板,一侧的第二安装板与第一减速电机固定连接;滚轮,两个第二安装板上侧内部均间隔转动式设有四个滚轮;第一转轴,八个滚轮顶部均设有第一转轴,八个第一转轴均与延长板转动式连接。
9.有益地,还包括有稳定机构,稳定机构包括:第三安装板,两个第二安装板内侧下部均设有第三安装板;第三电动推杆,两个第三安装板顶部均安装有第三电动推杆,第三电动推杆与控制模块通过继电器控制模块连接;第二推板,两个第三电动推杆的伸缩杆上均设有第二推板;第二距离传感器,一侧的第二推板上设有第二距离传感器,第二距离传感器与控制模块通过电性连接。
10.有益地,还包括有固定机构,固定机构包括:第二减速电机,固定板底部安装有第二减速电机,第二减速电机与控制模块通过继电器控制模块连接;第二转轴,第二减速电机的输出轴上设有第二转轴;丝杆,固定板底部两侧中间均转动式设有丝杆;移动杆,两个丝杆下侧均螺纹式设有移动杆;滑槽,两个移动杆之间两侧均设有滑槽;滑杆,滑槽两侧均设有滑杆;弧形槽,固定板两侧均设有弧形槽;卡杆,弧形槽内部两侧均滑动式设有卡杆,卡杆与同侧的滑杆固定连接;第一传动组件,第二转轴下侧与一侧的丝杆下部之间连接有第一传动组件;第二传动组件,两个丝杆下部之间连接有第二传动组件。
11.有益地,还包括有吸氧机构,吸氧机构包括:固定环,枕头底部设有两侧均设有固定环;气筒,两个固定环之间设有气筒;挂钩,枕头上设有挂钩;面罩,挂钩上放置有面罩;气管,气筒和面罩之间连接有气管;电磁阀,气管上设有电磁阀,电磁阀与控制模块通过继电器控制模块连接。
12.有益地,按压板运转可对病人心肺进行按压复苏。
13.与现有技术相比,本发明具有以下优点:1、本发明通过按压板向下运动与病人心肺接触时,可对病人的心肺进行按压,实现按压的效果;2、通过医护人员将本设备推动至急救床上,急救床使得滚轮转动,从而带动第一转轴转动,滚轮转动方便将本设备安装在急救床上,可实现导向的效果;3、通过第二距离传感器与急救床之间的距离达到控制模块中的预设值时,控制模块控制第三电动推杆的伸缩杆停止工作,第二推板向上运动能使得本设备固定在急救床上,实现稳定的效果;4、通过滑杆向上运动的同时也向外运动,从而带动同侧的卡杆向外运动,使得同侧的两个卡杆能闭合起来,可对病人手臂进行固定,使得能固定病人手臂的活动范围,实现固定的效果;5、通过控制模块控制电磁阀打开,使得气筒中的氧气能通过气管流动到面罩中,医护人员可将面罩戴在病人面部上,使得病人能够吸入到氧气,实现病人吸氧的效果。
附图说明
14.图1为本发明的第一视角立体结构示意图。
15.图2为本发明的第二视角立体结构示意图。
16.图3为本发明的定位机构立体结构示意图。
17.图4为本发明的按压机构立体结构示意图。
18.图5为本发明的导向机构剖面立体结构示意图。
19.图6为本发明的稳定机构立体结构示意图。
20.图7为本发明的固定机构第一部分立体结构示意图。
21.图8为本发明的固定机构第二部分立体结构示意图。
22.图9为本发明的吸氧机构立体结构示意图。
23.图10为本发明的电路框图。
24.图11为本发明的电路原理图。
25.图中零部件名称及序号:11、固定板,12、延长板,13、枕头,14、第一压力传感器,2、控制箱,31、第一接触开关,32、第二接触开关,4、按压板,5、定位机构,51、第一安装板,52、第一减速电机,53、第一电动推杆,54、安装台,6、按压机构,61、第二电动推杆,62、第一推板,63、伸缩杆,64、弹簧,65、第一距离传感器,66、第二压力传感器,7、导向机构,71、第二安装板,72、滚轮,73、第一转轴,8、稳定机构,81、第三安装板,82、第三电动推杆,83、第二推板,84、第二距离传感器,9、固定机构,91、第二减速电机,92、第二转轴,93、第一传动组件,
94、丝杆,95、移动杆,96、滑槽,97、滑杆,98、弧形槽,99、卡杆,910、第二传动组件,10、吸氧机构,101、气筒,102、固定环,103、挂钩,104、面罩,105、气管,106、电磁阀。
具体实施方式
26.本发明中公开的所有特征,或公开的所有方法或过程中的步骤,除了互相排斥的特征和/或步骤以外,均可以用任何方式组合。
27.本发明(包括任何附加权利要求、摘要和附图)中公开的任一特征,除非特别叙述,均可被其他等效或具有类似目的并加以替换。即,除非特别叙述,每个特征只是一系列等效或类似特征中的一个例子而已。
28.下面将结合本发明实施例中的附图1至图11实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例只是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
29.如图1至图11所示,一种急救科用心肺复苏抢救辅助设备,包括有固定板11、延长板12、枕头13、第一压力传感器14、控制箱2、第一接触开关31、第二接触开关32、按压板4、定位机构5和按压机构6,固定板11后侧设有延长板12,固定板11前侧中间设有枕头13,枕头13顶部中间设有第一压力传感器14,第一压力传感器14与控制模块通过电性连接,延长板12左侧设有定位机构5,定位机构5上安装有控制箱2,控制箱2安装有开关电源、控制模块和电源模块,开关电源为整个辅助设备供电,开关电源的输出端与电源模块通过电性连接,电源模块上通过线路连接有电源总开关,控制模块和电源模块通过电性连接,控制模块上连接有ds1302时钟电路和24c02电路,控制箱2顶部后侧设有第一接触开关31,第一接触开关31与控制模块通过电性连接,控制箱2顶部前侧设有第二接触开关32,第二接触开关32与控制模块通过电性连接,定位机构5上设有按压机构6,按压机构6上设有按压板4。
30.定位机构5包括有第一安装板51、第一减速电机52、第一电动推杆53和安装台54,固定板11左侧设有第一安装板51,第一安装板51顶部左侧与控制箱2连接,第一安装板51底部安装有第一减速电机52,第一减速电机52与控制模块通过继电器控制模块连接,第一减速电机52的输出轴上设有第一电动推杆53,第一电动推杆53与控制模块通过继电器控制模块连接,第一电动推杆53的伸缩杆上设有安装台54。
31.按压机构6包括有第二电动推杆61、第一推板62、伸缩杆63、弹簧64、第一距离传感器65和第二压力传感器66,安装台54内部右侧安装有第二电动推杆61,第二电动推杆61与控制模块通过继电器控制模块连接,第二电动推杆61的伸缩杆设有第一推板62,第一推板62底部前后两侧均设有伸缩杆63,两个伸缩杆63底部均与按压板4连接,两个伸缩杆63上均绕有弹簧64,弹簧64两端分别与第一推板62和按压板4连接,按压板4底部右侧设有第一距离传感器65,第一距离传感器65与控制模块通过电性连接,按压板4底部左侧设有第二压力传感器66,第二压力传感器66与控制模块通过电性连接。
32.还包括有导向机构7,导向机构7包括有第二安装板71、滚轮72和第一转轴73,延长板12底部左右两侧均设有第二安装板71,左侧的第二安装板71与第一减速电机52固定连接,两个第二安装板71上侧内部均间隔转动式设有四个滚轮72,八个滚轮72顶部均设有第一转轴73,八个第一转轴73均与延长板12转动式连接。
33.还包括有稳定机构8,稳定机构8包括有第三安装板81、第三电动推杆82、第二推板83和第二距离传感器84,两个第二安装板71内侧下部均设有第三安装板81,两个第三安装板81顶部均安装有第三电动推杆82,第三电动推杆82与控制模块通过继电器控制模块连接,两个第三电动推杆82的伸缩杆上均设有第二推板83,左侧的第二推板83右部设有第二距离传感器84,第二距离传感器84与控制模块通过电性连接。
34.还包括有固定机构9,固定机构9包括有第二减速电机91、第二转轴92、第一传动组件93、丝杆94、移动杆95、滑槽96、滑杆97、弧形槽98、卡杆99和第二传动组件910,固定板11前侧底部安装有第二减速电机91,第二减速电机91与控制模块通过继电器控制模块连接,第二减速电机91的输出轴上设有第二转轴92,固定板11底部前后两侧中间均转动式设有丝杆94,两个丝杆94下侧均螺纹式设有移动杆95,两个移动杆95之间左右两侧均设有滑槽96,滑槽96前后两侧均设有滑杆97,固定板11左右两侧均设有弧形槽98,弧形槽98内部前后两侧均滑动式设有卡杆99,卡杆99与同侧的滑杆97固定连接,第二转轴92下侧与前侧的丝杆94下部之间连接有第一传动组件93,第一传动组件93由两个第一皮带轮和一个第一皮带组成,一个第一皮带轮连接在第二转轴92下侧,另一个第一皮带轮连接在前侧的丝杆94下部,两个第一皮带轮之间绕有第一皮带,两个丝杆94下部之间连接有第二传动组件910,第二传动组件910由两个第二皮带轮和一个第二皮带组成,一个第二皮带轮连接在前侧的丝杆94下部,另一个第二皮带轮连接在后侧的丝杆94下部,两个第二皮带轮之间绕有第二皮带。
35.还包括有吸氧机构10,吸氧机构10包括有气筒101、固定环102、挂钩103、面罩104、气管105和电磁阀106,枕头13底部设有左右两侧均设有固定环102,两个固定环102之间设有气筒101,枕头13左侧设有挂钩103,挂钩103上放置有面罩104,气筒101左侧和面罩104右部之间连接有气管105,气管105右部设有电磁阀106,电磁阀106与控制模块通过继电器控制模块连接。
36.当急救科室的医护人员需要对病人进行心肺复苏治疗时,可使用这种急救科用心肺复苏抢救辅助设备,首先医护人员需要将本设备安装在急救床上,安装完后,医护人员可按动电源总开关,为本设备上电,医护人员可手动按动第一接触开关31,控制模块控制定位机构5运转,从而带动按压机构6和按压板4均运转,随后医护人员可将病人放在本设备上,并将病人的头部靠在枕头13上,当第一压力传感器14与病人头部之间的压力值达到控制模块中的预设值时,控制模块控制定位机构5反向运转,从而带动按压机构6和按压板4均反向运转,当按压机构6部件与病人的距离达到控制模块中的预设值时,控制模块控制定位机构5停止运转,同时控制按压机构6运转三十分钟,从而带动按压板4运转,使得按压板4能对病人的心肺进行按压复苏,三十分钟后,控制模块控制按压机构6停止运转,随后医护人员可再次按动第一接触开关31,控制模块再次控制定位机构5运转,方便医护人员将病人从急救床上抬到病床上休息,随后医护人员可按动第二接触开关32,控制模块控制定位机构5反向运转复位,然后医护人员可再次按动电源总开关,为本设备断电。
37.医护人员可按动第一接触开关31,控制模块控制第一减速电机52的输出轴逆时针转动九十度,同时控制第一电动推杆53的伸缩杆伸长至最大位置,第一减速电机52的输出轴转动带动第一电动推杆53、安装台54、第二电动推杆61、第一推板62、伸缩杆63、弹簧64、第一距离传感器65、第二压力传感器66和按压板4均逆时针转动九十度,当第一减速电机52的输出轴逆时针转动九十度后,控制模块控制第一减速电机52的输出轴停止工作,当第一
电动推杆53的伸缩杆伸长至最大位置时,第一电动推杆53的伸缩杆带动安装台54、第二电动推杆61、第一推板62、伸缩杆63、弹簧64、第一距离传感器65、第二压力传感器66和按压板4均向上运动至最大位置,当第一电动推杆53的伸缩杆伸长至最大位置后,控制模块控制第一电动推杆53的伸缩杆停止工作,此时医护人员可将病人放在本设备上,并将病人的头部靠在枕头13上,第一压力传感器14与病人头部之间的压力达到控制模块中的预设值时,控制模块控制第一减速电机52的输出轴顺时针转动九十度,同时控制模块也控制第一电动推杆53的伸缩杆缩短,第一减速电机52的输出轴顺时针转动带动第一电动推杆53、安装台54、第二电动推杆61、第一推板62、伸缩杆63、弹簧64、第一距离传感器65、第二压力传感器66和按压板4均顺时针转动九十度,当第一减速电机52的输出轴顺时针转动九十度后,控制模块控制第一减速电机52的输出轴停止工作,当第一电动推杆53的伸缩杆缩短时,第一电动推杆53的伸缩杆带动安装台54、第二电动推杆61、第一推板62、伸缩杆63、弹簧64、第一距离传感器65、第二压力传感器66和按压板4均向下运动,当第一距离传感器65与病人身体部位之间的距离达到控制模块中的预设值时,控制模块控制第一电动推杆53的伸缩杆停止工作,同时控制模块也控制第二电动推杆61的伸缩杆伸长至最大位置,从而带动第一推板62、伸缩杆63、弹簧64、第一距离传感器65、第二压力传感器66和按压板4均向下运动至最大位置,当按压板4向下运动与病人心肺接触时,可对病人的心肺进行按压,实现按压的效果,使得按压板4向上运动,伸缩杆63被缩短,弹簧64被压缩,若是第二压力传感器66与病人心肺之间的压力达到控制模块中的预设值时,控制模块控制第二电动推杆61的伸缩杆缩短至最小位置,从而带动第一推板62、伸缩杆63、弹簧64、第一距离传感器65、第二压力传感器66和按压板4均向上运动至最小位置,当按压板4与病人心肺不接触时,由于弹簧64复位带动伸缩杆63复位,从而带动按压板4向下运动,当第二电动推杆61的伸缩杆缩短至最小位置后,控制模块控制第二电动推杆61的伸缩杆伸长至最大位置,如此循环,三十分钟后,控制模块控制第二电动推杆61的伸缩杆停止工作,随后医护人员可再次按动第一接触开关31,控制模块控制第一减速电机52再次逆时针转动九十度,同时控制模块也控制第一电动推杆53的伸缩杆伸长至最大位置,方便医护人员将抢救完的病人抬到病床上休息,随后医护人员可短按第二接触开关32,控制模块控制第一减速电机52顺时针转动九十度,同时控制第一电动推杆53的伸缩杆缩短至最小位置,当第一减速电机52的输出轴顺时针转动九十度后,控制模块控制第一减速电机52停止工作,第一电动推杆53的伸缩杆缩短至最小位置后,控制模块控制第一电动推杆53的伸缩杆停止工作。
38.当医护人员将本设备安装在急救床上时,由于医护人员将本设备推动至急救床上,急救床使得滚轮72转动,从而带动第一转轴73转动,滚轮72转动方便将本设备安装在急救床上,可实现导向的效果,当医护人员需要将本设备从急救床上搬离时,使得滚轮72反向转动,从而带动第一转轴73反向转动复位。
39.当医护人员将本设备安装在急救床上后,医护人员可长按第二接触开关32,控制模块控制第三电动推杆82的伸缩杆伸长,从而带动第二推板83和第二距离传感器84均向上运动,若是第二距离传感器84与急救床之间的距离达到控制模块中的预设值时,控制模块控制第三电动推杆82的伸缩杆停止工作,第二推板83向上运动能使得本设备固定在急救床上,实现稳定的效果,当医护人员再次长按第二接触开关32,控制模块控制第三电动推杆82的伸缩杆缩短至最小位置,从而带动第二推板83和第二距离传感器84均向下运动至最小位
置,当第三电动推杆82的伸缩杆缩短至最小位置后,控制模块控制第三电动推杆82的伸缩杆停止工作。
40.第一压力传感器14与病人头部之间的压力达到控制模块中的预设值时,控制模块控制第一减速电机52的输出轴顺时针转动九十度,同时控制模块也控制第一电动推杆53的伸缩杆缩短,以及控制第二减速电机91的输出轴转动六秒,从而带动第二转轴92、第一传动组件93、第二传动组件910和丝杆94均转动六秒,使得移动杆95和滑槽96均向上运动六秒,从而使得滑杆97向上运动的同时也向外运动,进而带动同侧的卡杆99向外运动,使得同侧的两个卡杆99能闭合起来,可对病人手臂进行固定,使得能固定病人手臂的活动范围,实现固定的效果,六秒后,控制模块控制第二减速电机91的输出轴停止工作,当控制模块控制第二电动推杆61的伸缩杆停止工作的同时,控制模块也控制第二减速电机91的输出轴反向转动六秒,从而带动第二转轴92、第一传动组件93、第二传动组件910和丝杆94均反向转动六秒,使得移动杆95和滑槽96均向下运动六秒,从而使得滑杆97向下运动的同时也向内运动,进而带动同侧的卡杆99向内运动复位,使得两个卡杆99不接触,六秒后,控制模块控制第二减速电机91的输出轴停止工作。
41.当按压板4对病人心肺按压五秒后,控制模块控制电磁阀106打开,使得气筒101中的氧气能通过气管105流动到面罩104中,医护人员可将面罩104戴在病人面部上,使得病人能够吸入到氧气,实现病人吸氧的效果,当控制模块控制第二电动推杆61的伸缩杆停止工作的同时,控制模块控制第二减速电机91的输出轴反向转动六秒,也控制电磁阀106关闭,随后医护人员将面罩104从病人的面部取下,并放回原位即可。
42.虽然已经参照示例性实施例描述了本发明,但是应理解本发明不限于所公开的示例性实施例。以下权利要求的范围应给予最宽泛的解释,以便涵盖所有的变型以及等同的结构和功能。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1