一种跌倒检测方法、装置、设备及存储介质与流程
1.本发明属于智能设备技术领域,尤其涉及一种跌倒检测方法、装置、设备及存储介质。
背景技术:
2.随着年龄增长,身体机能下降,人的移动能力可能受到影响,因此,跌倒是危害老年人健康的重要因素,跌倒对老年人的健康状态可能会有灾难性后果。年龄越大,发生跌倒的可能性也就越大,据估计,跌倒是导致老年人死亡的前三大原因之一。
3.个人紧急求助设备可在用户发生紧急状况向用于向为特定用户或机构请求帮助。用户可通过个人紧急求助设备上的按钮请求帮助,然而,若用户不能自主按下按钮,则意味着在很长时间内得不到帮助,例如,跌倒,由于人体发生跌倒具有不确定性和不可预知性,当老年人跌倒后,如果长时间得不到及时有效的帮助,可能会导致长期瘫痪甚至危及生命。因此,为了确保跌倒后用户(例如,老人)能得到及时的救治,对用户进行跌倒检测是非常必要的。
4.目前,现有跌倒检测设备通常包括一个或多个传感器,例如加速度计和重力传感器,通过对传感器的输出进行处理以确定用户是否跌倒。然而,这些设备上的跌倒检测算法通常是通过三轴加速传感器和重力之间的关系,得到姿态的角度,然后当三个角度的一个瞬时变化达到某个阈值时,确定此时用户发生了跌倒,由于该检测方法未考虑到人处于运动状态时也会发生同样的变化,导致跌倒检测的精确度不高。
技术实现要素:
5.本发明的目的在于提供一种跌倒检测方法、装置、设备及存储介质,旨在解决由于现有技术对用户跌倒的检测准确率不高的问题。
6.一方面,本发明提供了一种跌倒检测方法,所述方法包括下述步骤:通过便携式设备中的三轴加速度传感器获取当前时间点所述便携式设备在x、y、z轴的加速度;根据所述便携式设备在x、y、z轴的加速度,计算所述便携式设备的姿态角,所述姿态角包括俯仰角、偏航角和翻滚角;当所述俯仰角、偏航角和翻滚角中的任何一个达到预设的角度阈值时,获取所述便携式设备在第一预设时长内沿x、y、z轴的移动距离;当所述便携式设备在第一预设时长内沿x、y、z轴的移动距离中的任何一个达到对应的预设距离阈值时,检测所述便携式设备在第二预设时长中是否存在超过第三预设时长的持续静止时间;若存在,则确认便携式设备用户发生了跌倒。
7.另一方面,本发明提供了一种跌倒检测装置,所述装置包括:加速度获取单元,用于通过便携式设备中的三轴加速度传感器获取当前时间点所
述便携式设备在x、y、z轴的加速度;姿态角计算单元,用于根据所述便携式设备在x、y、z轴的加速度,计算所述便携式设备的姿态角,所述姿态角包括俯仰角、偏航角和翻滚角;距离获取单元,用于当所述俯仰角、偏航角和翻滚角中的任何一个达到预设的角度阈值时,获取所述便携式设备在第一预设时长内沿x、y、z轴的移动距离;静止检测单元,用于当所述便携式设备在第一预设时长内沿x、y、z轴的移动距离中的任何一个达到对应的预设距离阈值时,检测所述便携式设备在第二预设时长中是否存在超过第三预设时长的持续静止时间;以及跌倒确认单元,用于若存在超过所述第三预设时长的持续静止时间,则确认便携式设备用户发生了跌倒。
8.另一方面,本发明还提供了一种便携式设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上所述方法的步骤。
9.另一方面,本发明还提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现如上所述方法的步骤。
10.本发明通过便携式设备中的三轴加速度传感器获取当前时间点便携式设备在x、y、z轴的加速度,根据便携式设备在x、y、z轴的加速度,计算便携式设备的姿态角,当姿态角中的俯仰角、偏航角和翻滚角中的任何一个达到预设的角度阈值时,获取便携式设备在第一预设时长内沿x、y、z轴的移动距离,当便携式设备在第一预设时长内沿x、y、z轴的移动距离中的任何一个达到对应的预设距离阈值时,检测便携式设备在第二预设时长中是否存在超过第三预设时长的持续静止时间,若存在,则确认便携式设备用户发生了跌倒,从而提高了便携式设备用户跌倒检测的准确度。
附图说明
11.图1是本发明实施例一提供的跌倒检测方法的实现流程图;图2是本发明实施例二提供的跌倒检测装置的结构示意图;以及图3是本发明实施例三提供的便携式设备的结构示意图。
具体实施方式
12.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
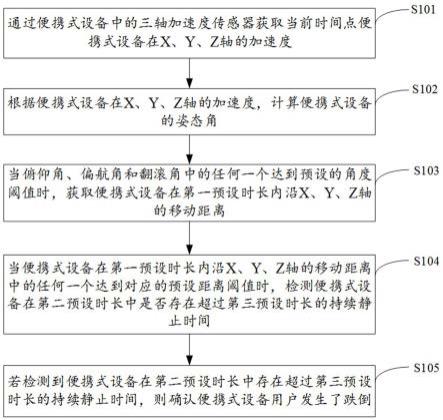
13.以下结合具体实施例对本发明的具体实现进行详细描述:实施例一:图1示出了本发明实施例一提供的跌倒检测方法的实现流程,为了便于说明,仅示出了与本发明实施例相关的部分,详述如下:在步骤s101中,通过便携式设备中的三轴加速度传感器获取当前时间点便携式设备在x、y、z轴的加速度;本发明实施例适用于具备三轴加速度传感器的便携式设备,优选地,适用于穿戴
式设备,以便捷地对用户是否发生跌倒进行检测。其中,穿戴式设备可以为智能手表、智能手环、智能衣物等,穿戴式设备中设置有三轴加速度传感器,以获取便携式设备在x、y、z轴的加速度。
14.在步骤s102中,根据便携式设备在x、y、z轴的加速度,计算便携式设备的姿态角;在本发明实施例中,在得到当前时间点便携式设备在x、y、z轴的加速度后,可根据便携式设备在x、y、z轴的加速度,计算便携式设备的姿态角,其中,便携式设备的姿态角包括俯仰角、偏航角和翻滚角。
15.在一优选实施方式中,在计算便携式设备的姿态角时,通过以下公式:pitch=arctan(a
x
/);roll=arctan(ay/);yaw=arctan(/a
z2
);分别计算便携式设备的姿态角,其中,pitch、roll和yaw分别表示俯仰角、偏航角和翻滚角,a
x 、a
y 和az分别表示便携式设备在x、y、z轴的加速度,以准确得到当前时间点便携式设备的姿态。
16.在步骤s103中,当俯仰角、偏航角和翻滚角中的任何一个达到预设的角度阈值时,获取便携式设备在第一预设时长内沿x、y、z轴的移动距离;在本发明实施例中,判断俯仰角、偏航角和翻滚角是否达到预设的角度阈值,当俯仰角、偏航角和翻滚角中的任何一个达到预设的角度阈值时,表明姿态发生了变化,便携式设备有可能发生了跌倒。为了进一步确定该变化是否为跌倒,此时获取便携式设备在第一预设时长内沿x、y、z轴的移动距离。其中,第一预设时长优选为1秒,以准确判断便携式设备用户是否在短时或瞬时内发生了移动。
17.在一优选实施方式中,角度阈值为45度,从而准确地确定便携式设备用户的姿态是否发生了变化。
18.在一优选实施方式中,在获取便携式设备在第一预设时长内沿x、y、z轴的移动距离时,通过以下公式:s
x
= ;sy= ;sz= ;分别计算便携式设备在第一预设时长内沿x、y、z轴的移动距离,其中,、和
为采样点对应的加速度,ti表示采样点对应的时间间隔,n表示第一预设时长内的采样点。
19.在步骤s104中,当便携式设备在第一预设时长内沿x、y、z轴的移动距离中的任何一个达到对应的预设距离阈值时,检测便携式设备在第二预设时长中是否存在超过第三预设时长的持续静止时间;在本发明实施例中,判断便携式设备在第一预设时长内沿x、y、z轴的移动距离中的任何一个是否达到对应的预设距离阈值,当便携式设备在第一预设时长内沿x、y、z轴的移动距离中的任何一个达到了对应的预设距离阈值时,表明便携式设备用户在短时或瞬时内发生了移动,便携式设备用户有可能发生了跌倒。为了进一步准确地确定该变化是否为跌倒,此时检测便携式设备在第二预设时长中是否存在超过第三预设时长的持续静止时间。其中,第二预设时长为5秒,第三预设时长为2秒,以准确判断便携式设备用户在短时或瞬时移动后是否静止。
20.在一优选实施方式中,在检测便携式设备在第二预设时长中是否存在超过第三预设时长的持续静止时间时,计算便携式设备沿x、y、z轴在第二预设时长中连续采样点中相邻采样点对应的加速度差分,当加速度差分位于预设差分范围的对应持续时长超过第三预设时长、且便携式设备在连续采样点的姿态角位于预设角度范围时,确定便携式设备在第二预设时长中存在超过第三预设时长的持续静止时间,否则不存在超过第三预设时长的持续静止时间。
21.具体地,判断相邻采样点对应的加速度差分、、是否位于预设差分范围,例如,约等于0的范围,且判断这些采样点覆盖的时长是否超过第三预设时长,另外,还需判断便携式设备在这些连续采样点便携式设备的姿态角是否位于预设角度范围,例如,约等于0的范围,若相邻采样点对应的加速度差分、、位于预设差分范围,且这些采样点覆盖的时长超过第三预设时长,另外,便携式设备在这些连续采样点便携式设备的姿态角(即俯仰角、偏航角和翻滚角)位于预设角度范围,此时,可确定便携式设备用户发生了跌倒,否则可确认便携式设备用户没有发生跌倒。
22.在一优选实施方式中,考虑到便携式设备用户身高、体重不同,跌倒时短时移动距离也不同,因此,为了进一步提高便携式设备用户跌倒检测的精确度,可根据便携式设备用户身高、体重,差异化地设置步骤s104中的距离阈值。具体地,在检测便携式设备在第二预设时长中是否存在超过第三预设时长的持续静止时间之前,获取便携式设备沿x、y、z轴对应的佩戴高度拟合函数,根据便携式设备用户的身高、体重以及对应的佩戴高度拟合函数,计算便携式设备沿x、y、z轴对应的距离阈值,以准确确定不同身高、体重的用户是否发生了跌倒。
23.进一步地,在一优选实施方式中,在根据便携式设备用户的身高、体重以及对应的
佩戴高度拟合函数计算便携式设备沿x、y、z轴对应的距离阈值时,通过公式s
x
=f
x
* pitch、sy=fy* roll、sz=fz* yaw计算便携式设备沿x、y、z轴对应的距离阈值,其中,f
x
、f
y 以及fz分别表示便携式设备沿x、y、z轴对应的佩戴高度拟合函数,pitch、roll和yaw分别表示沿x、y、z轴对应的角度阈值,佩戴高度拟合函数f
x
、f
y 以及fz为线性方程,作为示例地,沿x轴对应的角度阈值f
x
可表示为:f
x
= a
1 * x
1 + a
2 * x
2 + b,其中x1代表身高,x2代表体重,a1、a2、b表示拟合得到的参数,这样,当接收到便携式设备用户的身高、体重后,即可求出针对该用户的、用于差异化跌倒判断的距离阈值,从而提高后续用户跌倒判断的准确性。
24.在步骤s105中,若检测到便携式设备在第二预设时长中存在超过第三预设时长的持续静止时间,则确认便携式设备用户发生了跌倒。
25.在本发明实施例中,若检测到便携式设备在第二预设时长中存在超过第三预设时长的持续静止时间,则确认便携式设备用户发生了跌倒,否则确认便携式设备用户未发生跌倒。
26.在本发明实施例中,通过便携式设备中的三轴加速度传感器获取当前时间点便携式设备在x、y、z轴的加速度,根据便携式设备在x、y、z轴的加速度,计算便携式设备的姿态角,当姿态角中的俯仰角、偏航角和翻滚角中的任何一个达到预设的角度阈值时,获取便携式设备在第一预设时长内沿x、y、z轴的移动距离,当便携式设备在第一预设时长内沿x、y、z轴的移动距离中的任何一个达到对应的预设距离阈值时,检测便携式设备在第二预设时长中是否存在超过第三预设时长的持续静止时间,若存在,则确认便携式设备用户发生了跌倒,从而提高了便携式设备用户跌倒检测的准确度。
27.实施例二:图2示出了本发明实施例二提供的跌倒检测装置的结构,为了便于说明,仅示出了与本发明实施例相关的部分,其中包括:加速度获取单元21,用于通过便携式设备中的三轴加速度传感器获取当前时间点便携式设备在x、y、z轴的加速度;姿态角计算单元22,用于根据便携式设备在x、y、z轴的加速度,计算便携式设备的姿态角,姿态角包括俯仰角、偏航角和翻滚角;距离获取单元23,用于当俯仰角、偏航角和翻滚角中的任何一个达到预设的角度阈值时,获取便携式设备在第一预设时长内沿x、y、z轴的移动距离;静止检测单元24,用于当便携式设备在第一预设时长内沿x、y、z轴的移动距离中的任何一个达到对应的预设距离阈值时,检测便携式设备在第二预设时长中是否存在超过第三预设时长的持续静止时间;以及跌倒确认单元25,用于若存在超过第三预设时长的持续静止时间,则确认便携式设备用户发生了跌倒。
28.在本发明实施例中,通过便携式设备中的三轴加速度传感器获取当前时间点便携式设备在x、y、z轴的加速度,根据便携式设备在x、y、z轴的加速度,计算便携式设备的姿态角,当姿态角中的俯仰角、偏航角和翻滚角中的任何一个达到预设的角度阈值时,获取便携式设备在第一预设时长内沿x、y、z轴的移动距离,当便携式设备在第一预设时长内沿x、y、z轴的移动距离中的任何一个达到对应的预设距离阈值时,检测便携式设备在第二预设时长中是否存在超过第三预设时长的持续静止时间,若存在,则确认便携式设备用户发生了跌
倒,从而提高了便携式设备用户跌倒检测的准确度。
29.在本发明实施例中,跌倒检测装置的各单元可由相应的硬件或软件单元实现,各单元可以为独立的软、硬件单元,也可以集成为一个软、硬件单元,在此不用以限制本发明。各单元的具体实施方式可参考前述方法实施例的描述,在此不再赘述。
30.实施例三:图3示出了本发明实施例三提供的便携式设备的结构,为了便于说明,仅示出了与本发明实施例相关的部分。
31.本发明实施例的便携式设备3包括处理器30、存储器31以及存储在存储器31中并可在处理器30上运行的计算机程序32。该处理器30执行计算机程序32时实现上述跌倒检测方法实施例中的步骤,例如图1所示的步骤s101至s105。或者,处理器30执行计算机程序32时实现上述跌倒检测装置实施例中各单元的功能,例如图2所示单元21至25的功能。
32.在本发明实施例中,通过便携式设备中的三轴加速度传感器获取当前时间点便携式设备在x、y、z轴的加速度,根据便携式设备在x、y、z轴的加速度,计算便携式设备的姿态角,当姿态角中的俯仰角、偏航角和翻滚角中的任何一个达到预设的角度阈值时,获取便携式设备在第一预设时长内沿x、y、z轴的移动距离,当便携式设备在第一预设时长内沿x、y、z轴的移动距离中的任何一个达到对应的预设距离阈值时,检测便携式设备在第二预设时长中是否存在超过第三预设时长的持续静止时间,若存在,则确认便携式设备用户发生了跌倒,从而提高了便携式设备用户跌倒检测的准确度。
33.本发明实施例的便携式设备可以为智能手表、手环等。该便携式设备3中处理器30执行计算机程序32时实现跌倒检测方法时实现的步骤可参考前述方法实施例的描述,在此不再赘述。
34.实施例四:在本发明实施例中,提供了一种计算机可读存储介质,该计算机可读存储介质存储有计算机程序,该计算机程序被处理器执行时实现上述跌倒检测方法实施例中的步骤,例如,图1所示的步骤s101至s105。或者,该计算机程序被处理器执行时实现上述跌倒检测装置实施例中各单元的功能,例如图2所示单元21至25的功能。
35.本发明实施例的计算机可读存储介质可以包括能够携带计算机程序代码的任何实体或装置、记录介质,例如,rom/ram、磁盘、光盘、闪存等存储器。
36.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1