塑形磁刺激仪的自适应参数调节方法和系统与流程
1.本发明涉及磁刺激塑形技术领域,具体为塑形磁刺激仪的自适应参数调节方法和系统。
背景技术:
2.随着社会经济的发展,匀称优美的身体曲线越来越成为爱美人士追求的目标,人体轮廓外形主要由肌肉和脂肪塑造,适量脂肪均匀覆盖在肌肉和骨骼之上,形成人体特有的曲线,产生美学的质感和量感;由于年龄增长、怀孕分娩、久坐办公、缺乏锻炼、过量饮食等原因,脂肪细胞体积和分布的变化以及肌肉不足会使身材走形,显得臃肿、松弛和衰老;目前主流的塑形技术有:脂垫摘除、负压吸收脂肪抽吸术、注射溶脂、自体脂肪填充、超声辅助吸脂、动力辅助吸脂、水射流辅助吸脂技术、射频溶脂、激光溶脂术和磁刺激塑形;其中,近些年兴起的磁刺激塑形技术除了具有冷冻、超声、射频这些非侵入式技术的无创、无痛、不需麻醉、无恢复期、无需长期穿塑身衣、即做即走的优势,还是唯一同时作用于肌肉和脂肪的技术,越来越受到重视和推崇。
3.磁刺激塑形技术通过主机产生高强度变化磁场发送至线圈拍头,穿透脂肪组织,在目标肌群产生感应电流,使运动神经元去极化,诱导肌肉顶峰收缩,从而增加肌力和肌张力,提高肌肉含量,加速脂肪代谢,塑造身体曲线;同时,较高的肌肉含量,可以提高代谢能力,能帮助更好地代谢已有脂肪和防止新的脂肪堆积,形成易瘦体质。
4.但是,目前的传感器材料大量采用金属制成,而磁刺激仪产生的交变强磁场会对有金属部件的传感器有极强的干扰,因而无法精准的采集实时的肌力相关数据;而且目前磁刺激塑形领域还没有科学量化的指标实时监测肌肉收缩状态,主要靠治疗师的个人经验和询问以及用户的主观感觉与口头反馈指导治疗过程,难以保证客观与安全;由于人体耐受机制和肌肉疲劳现象,需要根据疗程的进程,在各个刺激循环对不同的用户进行不同的参数调节;当多个用户同时塑形时,治疗师的数量通常难以满足。同时,治疗过程中,参数设置过低,肌肉收缩不足,塑形效果较差;参数设置过高,则容易引起肌肉损伤,诱导胃部疾病、女性经期问题,甚至癫痫。
技术实现要素:
5.针对现有技术存在的不足,本发明目的是提供塑形磁刺激仪的自适应参数调节方法和系统,可以解决现有磁刺激仪主要靠治疗师的个人经验以及用户的主观感觉与口头反馈指导治疗过程,难以保证客观与安全的问题。
6.为了实现上述目的,本发明是技术方案如下:
7.本发明是通过如下的技术方案来实现:塑形磁刺激仪的自适应参数调节方法:包括
8.调节磁刺激仪的刺激参数,实时采集当前用户目标肌群的肌力值,确定第一循环中的最终刺激参数及肌力值变化幅度;
9.通过所述最终刺激参数及肌力值变化幅度辨识当前用户的肌肉类型;
10.通过所述肌肉类型确定当前用户的自适应强度调节策略;
11.根据所述最终刺激参数和肌力值以及自适应强度调节策略自动调节用户后续循环的刺激参数。
12.进一步的,所述实时采集当前用户目标肌群的肌力值,包括采用信号采集模块采集当前用户目标肌群的肌力值;所述信号采集模块包括压力气囊、导气管、压力传感器、气泵、电磁阀;所述压力气囊连接压力传感器,且所述压力气囊安装在磁刺激仪的线圈拍头上;所述压力气囊连接气泵,且所述压力气囊连接导气管,所述导气管内安装电磁阀。
13.进一步的,还包括对压力气囊进行初始化设置使之处于最优压力状态;包括
14.设定压力气囊的初始默认值;
15.确定压力气囊当前时刻压力值与初始默认值的误差,具体为:
16.p_error(t)=p(t)-p_initial_set;
17.根据当前时刻压力气囊压力值与初始默认值的误差p_error(t)计算出控制信号control_air(t);
18.根据误差p_error(t)的正负,通过单片机发送控制信号控制压力气囊充放气,使压力气囊处于最优压力状态。
19.进一步的,所述刺激参数为数组,包括刺激强度、频率、脉冲数、间隔、时长。
20.进一步的,所述确定第一循环中的最终刺激参数是基于实时肌力值、波形以及当前用户的主观感受确定;其中的第一循环包括热身模式、塑形模式、放松模式。
21.进一步的,所述肌肉类型的辨识为:
22.将肌力值调节至预设参考值p_start_ref,塑形模式共n个脉冲,即进行n次顶峰收缩,收缩均值为p_1_i(i=1,2,
…
,n);
23.根据第一循环中塑形模式最终刺激参数s_1和肌力值变化幅值
△
p,辨识出肌力类型m(i):当threshold_s_lb_i《s_1≤threshold_s_ub_i而且threshold_p_lb_i《
△
p≤threshold_p_ub_i,确定肌肉类型为m(i);
24.其中,threshold_s_lb_i为第i种肌肉类型的刺激参数的判定阈值下限,threshold_s_ub_i为第i种肌肉类型的刺激参数的判定阈值上限;
25.threshold_p_lb_i为第i种肌肉类型的肌力值变化幅值的判定阈值下限,threshold_p_ub_i为第i种肌肉类型的肌力值变化幅值的判定阈值上限。
26.进一步的,所述通过所述肌肉类型确定当前用户的自适应强度调节策略,包括:
27.设定当前时刻肌力值与第一循环达到的参考肌力值的差值为:
28.p_delta(t)=(p_start_ref+
△
p)-p(t);
29.根据当前自适应强度调节策略t(i)和肌力值差值p_delta(t),计算出控制信号control_delta(t):
30.根据肌力值差值p_delta(t)的正负,通过单片机发送控制信号control_delta(t)给磁刺激仪的刺激主机,调低或者调高刺激参数。
31.塑形磁刺激仪的自适应参数调节系统,所述系统包括:
32.信号采集模块:所述信号采集模块用于实时采集当前用户目标肌群的收缩状态;
33.信号处理模块:所述信号处理模块连接信号采集模块,所述信号处理模块用于对
采集信号进行处理,将信号变换成容易分析与识别的肌力值,采集磁刺激仪输出的实时刺激参数;
34.单片机:所述单片机连接所述信号处理模块,所述单片机用于接受、储存、处理肌力值和刺激参数;所述单片机通过控制压力气囊实时气压,结合信号采集模块采集的信息辨识当前用户的肌肉类型,确定当前用户的自适应强度调节策略,确定出用户后续循环的刺激参数;
35.通信模块:所述通信模块连接单片机;
36.显示模块:所述显示模块连接通信模块,所述显示模块用于显示实时肌力曲线、肌力值、磁刺激参数;
37.磁刺激仪:所述磁刺激仪连接通信模块,所述磁刺激仪通过通信模块接受单片机发送的信号,发射相应频率、强度、脉冲数、间隔、时长的电磁波给线圈拍头,线圈拍头将电磁波作用于人体目标肌肉进行塑形。
38.进一步的,所述通信模块包括有线通信和无线通信,所述有线通信包括std和camac总线、isa总线、vxi总线、pci、compact及pxi总线、rs-232c、rs-422a、rs-485、usb、ieee-1943、ieee488、scsi总线、mxi总线中的一种或者多种;所述无线通信包括ieee802.15.4协议、zigbee协议、蓝牙协议、lora以及uwb通信方式中的一种或者多种。
39.与现有技术相比,本发明的有益效果包括:
40.本发明通过实时采集目标肌群肌力值,根据第一循环中时最终刺激参数和肌力值变化幅度辨识出用户肌肉类型,根据辨识的肌肉类型确定当前用户的自适应强度调节策略,在之后的循环中根据刺激参数和肌力值以及自适应强度调节策略自动调节刺激参数,使目标肌群处于最适合的收缩状态,从而保证塑形效果;本发明引入客观指标,使得塑形过程可视化,从而更加安全可靠,每一塑形循环达到最合适当前用户的顶峰收缩,从而提高塑形效果,节省治疗师资源,降低人工成本。
附图说明
41.参照附图来说明本发明的公开内容。应当了解,附图仅仅用于说明目的,而并非意在对本发明的保护范围构成限制,在附图中,相同的附图标记用于指代相同的部件。其中:
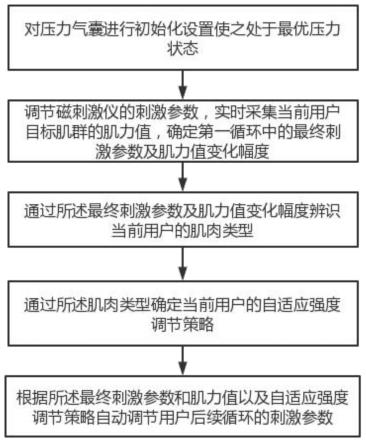
42.图1为本发明塑形磁刺激仪的自适应参数调节方法流程示意图;
43.图2为本发明塑形磁刺激仪的自适应参数调节系统的系统框图;
44.图3为本发明通过肌肉类型确定当前用户的自适应强度调节策略的流程图;
45.图4为本发明通过显示模块的显示界面图;
46.图5为本发明通过佩戴线圈拍头的初始化流程示意图;
47.图6为本发明实施案例的手动调节参数肌力值波形图;
48.图7为本发明实施案例的自适应调节参数肌力值波形图。
具体实施方式
49.容易理解,根据本发明的技术方案,在不变更本发明实质精神下,本领域的一般技术人员可以提出可相互替换的多种结构方式以及实现方式。因此,以下具体实施方式以及附图仅是对本发明的技术方案的示例性说明,而不应当视为本发明的全部或者视为对本发
明技术方案的限定或限制。
50.本发明利用信号采集模块采集磁刺激仪塑形时当前用户目标肌群的肌力值;所述信号采集模块包括压力气囊、导气管、压力传感器、气泵、电磁阀;所述压力气囊连接压力传感器,且所述压力气囊安装在磁刺激仪的线圈拍头上;所述压力气囊连接气泵,所述气泵用于对压力气囊进行打气加压,且所述压力气囊连接导气管,所述导气管内安装电磁阀,开启所述电磁阀可排出压力气囊内的气体,降低压力气囊的气压;利用压力传感器的压力值表征肌肉收缩时的肌力值,实现采集肌肉的状态信号;
51.采集的肌肉状态信号还可以是皮肤表面肌电信号,使用压力传感器和流体装置采集的压力信号,基于机械波(频率在10hz~10
10
hz)或电磁波(频率在10hz~10
20
hz)的图像信号;表面肌电信号使用贴在目标肌群上有缺口的圆形碳纤维电极;压力信号是在采集装置内填充气体或液体等流体,目标肌肉在被刺激时形变引起流体变化而采集到的信号;图像信号可以是超声成像、可见光成像、红外、微波成像、x线成像、x-ct成像、磁共振成像、核素成像、分子成像等。
52.示例性的,本发明采用压力气囊的方式进行肌肉状态的信号采集。
53.本发明提供塑形磁刺激仪的自适应参数调节方法,所述方法如图1所示,包括以下步骤:
54.步骤一:对压力气囊进行初始化设置使之处于最优压力状态;
55.由于在采集过程中,压力气囊的气压过低会导致压力传感器精度过低,从而肌力值不准和算法区分度低;气压过高会导致患者目标肌群和线圈拍头距离过大,磁刺激强度降低,降低塑形效果;因此,在进行信息采集前需要将压力气囊的气压控制在最合适的初始默认气压值p_initial_set。
56.同时由于长时间被不同用户使用,会使得压力气囊不可避免地存在跑气和变形的情况,导致压力值偏离初始设置值;为解决这些问题,本发明公开了智能控压算法,使得每次用户使用前压力气囊处于最优压力状态。
57.其中压力气囊的工作状态分为智能控压模式、塑形模式:
58.相应的,压力气囊的工作状态标值变量为working_flag;
59.当使用开关为关闭状态:working_flag=0;
60.当使用开关为开启状态,而且无人使用压力气囊时:working_flag=1,此时压力气囊的工作状态为智能控压模式,单片机控制气泵和电磁阀对压力气囊进行智能充放气,使其保持为初始默认值:p_initial_set;
61.当使用开关为开启状态,而且用户佩戴压力气囊进行塑形:working_flag=2,此时压力气囊的工作状态为塑形模式,气泵和电磁阀不会自动充放气,只能在用户的指令下工作,根据用户需求调节压力气囊的气压;
62.具体的,当刚开机或者更换磁刺激仪使用的用户时,压力气囊上无线圈拍头和绑带的压力,此时working_flag=1,进行智能控压处理:
63.1.1、设定压力气囊的初始默认值p_initial_set;
64.1.2、确定压力气囊当前压力值p(t)与初始默认值p_initial_set的误差为:
65.p_error(t)=p(t)-p_initial_set;
66.1.3、单片机根据当前压力气囊压力值与初始默认值的误差p_error(t)计算出控
制信号control_air(t);计算地策略原则是,当p_error(t)的绝对值越大,则控制信号control_air(t)的绝对值也应该越大;具体的算法包括但不限于分段线性算法,分段线性算法具体为:
[0067][0068]
式中,kj、threshold_j、threshold_neg_j分别表示的是kj为调节系数,threshold_j正向误差阈值;threshold_neg_j负向误差阈值。
[0069]
1.4、根据误差p_error(t)的正负,通过单片机发送控制信号控制压力气囊充放气,使压力气囊处于最优压力状态,具体为:
[0070]
当p_error(t)为负,即p_error(t)《0,单片机发送控制信号control_air(t)给气泵,对压力气囊进行充气;
[0071]
当p_error(t)为正,即p_error(t)》0,单片机发送控制信号control_air(t)给电磁阀,对压力气囊进行放气;
[0072]
当p_error(t)=0,气泵和电磁阀均不工作。
[0073]
步骤二:调节磁刺激仪的刺激参数,实时采集当前用户目标肌群的肌力值,确定第一循环中的最终刺激参数及肌力值变化幅度;
[0074]
一般一次完整的塑形过程可以分为6个循环,每个循环分为三个模式:热身模式、塑形模式、放松模式;通常热身模式主要频率为30hz,主要作用是肌肉适应、热身运动;塑形模式主要频率为40hz,主要作用是顶峰收缩、塑造线条;放松模式主要频率为5hz,主要作用是排出乳酸、缓解疲劳。
[0075]
在第一循环中:在步骤一的压力气囊调整到最优的压力状态后,将压力气囊固定在线圈拍头上,调节线圈拍头的松紧带,佩戴线圈拍头,如图5所示,在腰部佩戴线圈拍头;塑形开始时调节当前用户的绑带松紧使得压力气囊值(即肌力值)为开始参考值p_start_ref;人工手动调节磁刺激仪的刺激参数;所述刺激参数为数组,包括刺激强度、频率、脉冲数、间隔、时长;刺激参数的表达式可表示为s(t)=[strength(t);frequency(t);cycle(t);gap(t);duration(t)];第一循环开始时,治疗师调节绑带松紧,将压力气囊值调节至开始参考值p_start_ref,塑形模式共n个脉冲,即进行n次顶峰收缩,收缩均值为p_1_i(i=1,2,
…
,n);第一循环结束,根据第一循环中实时肌力值、波形以及当前用户的主观感受确定塑形模式最终刺激参数s_1,并得到肌力值变化幅值
△
p,其中
△
p为:
[0076][0077]
式中n为脉冲个数,p_1_i(i=1,2,
…
,n)为肌肉收缩均值。
[0078]
步骤三:通过所述最终刺激参数及肌力值变化幅度辨识当前用户的肌肉类型;
[0079]
根据步骤二得到的最终刺激参数s_1、肌力值变化幅值
△
p,辨识出肌力类型m(i):
[0080]
当threshold_s_lb_i《s_1≤threshold_s_ub_i而且threshold_p_lb_i《
△
p≤threshold_p_ub_i,确定肌肉类型为m(i)。
[0081]
其中,threshold_s_lb_i为第i种肌肉类型的刺激参数的判定阈值下限,threshold_s_ub_i为第i种肌肉类型的刺激参数的判定阈值上限;
[0082]
threshold_p_lb_i为第i种肌肉类型的肌力值变化幅值的判定阈值下限,threshold_p_ub_i为第i种肌肉类型的肌力值变化幅值的判定阈值上限。
[0083]
步骤四:通过所述肌肉类型确定当前用户的自适应强度调节策略;其流程如图3所示,
[0084]
根据第一循环辨识出的肌肉类型m(i),找到对应的自适应强度调节策略t(i)具体为:
[0085]
4.1、设当前肌力值与第一循环达到的参考肌力值的差值为:
[0086]
p_delta(t)=(p_start_ref+
△
p)-p(t)
[0087]
4.2、单片机根据当前自适应强度调节策略t(i)和肌力值差值p_delta(t),计算出控制信号control_delta(t):
[0088]
control_delta(t)=f(p_delta(t));
[0089]
具体的算法包括但不限于pid算法;pid算法具体为:
[0090][0091]
式中:k
p
(i)为比例项、ti(i)为积分项、td(i)为微分项;k
p
(i)、ti(i)、td(i)的取值将较大地影响肌力值达标的速度和效果,由调节策略t(i)确定;不同的t(i),对应不同的k
p
(i)、ti(i)、td(i)。先确定k
p
(i)、合适的k
p
(i)加快调节的速度;再确定ti(i)、ti(i)可以消除稳态误差;最后确定td(i),td(i)可以反应差值变化速度。
[0092]
4.3、根据肌力值差值p_delta(t)的正负,通过单片机发送控制信号control_delta(t)给磁刺激仪的刺激主机,调低或者调高刺激参数,具体为:
[0093]
当p_delta(t)为正,即p_delta(t)》0,单片机根据当前控制策略t(i),发送控制信号control_delta(t)给刺激主机,调高刺激参数;
[0094]
当p_delta(t)为负,即当p_delta(t)《0,单片机根据当前控制策略t(i),发送控制信号control_delta(t)给刺激主机,调低刺激参数;
[0095]
当p_delta(t)=0,刺激参数不变。
[0096]
步骤五:根据所述最终刺激参数和肌力值以及自适应强度调节策略自动调节用户后续循环的刺激参数;
[0097]
磁刺激仪根据第一个循环的数据自适应调节剩下五个循环的刺激参数,可以节省六分之五的人力成本,根据客观的肌力值能最大限度的保证用户安全和最合适的顶峰收缩,而不受限于治疗师的个人经验水平。
[0098]
实施案例:
[0099]
不失一般性地,以第十次内部实验第二位用户为例;刺激参数s包括刺激强度,频率,脉冲数,间隔,时长等,为方便展示,具体实施例以临床上调节最多的强度为例。
[0100]
压力气囊充气至初始设置值p_initial_set=8mmhg,用户平躺在治疗床上,将压力气囊扣在线圈拍头上,放置在腹部,调节绑带松紧,至压力气囊压力值为开始参考值p_
start_ref=30mmhg。
[0101]
第一次塑形为治疗师手动调节,第一个循环调节至35%强度,随后循环不进行调节,肌力值随着循环的进行不断下降,肌力值幅值从40下降至20,第二循环至第六循环塑形效果不断下降,如图6所示。
[0102]
为方便理解,一种仅基于刺激强度和肌力值幅值的简化版肌肉类型辨识规则(省略频率,脉冲数,间隔,时长等刺激参数)如下:
[0103]
肌肉类型m(1):80《s_1≤100而且
△
p》20,对磁耐受很高,腹部脂肪较多,肌肉较多;
[0104]
肌肉类型m(2):80《s_1≤100而且10《
△
p≤20,对磁耐受很高,腹部脂肪较多,肌肉一般;
[0105]
肌肉类型m(3):80《s_1≤100而且
△
p≤10,对磁耐受很高,腹部脂肪很多,肌肉较少;
[0106]
肌肉类型m(4):60《s_1≤80而且
△
p》20,对磁耐受较高,腹部脂肪一般,肌肉较多
[0107]
肌肉类型m(5):60《s_1≤80而且10《
△
p≤20,对磁耐受高,腹部脂肪一般,肌肉一般
[0108]
肌肉类型m(6):60《s_1≤80而且
△
p≤10,对磁耐受高,腹部脂肪一般,肌肉较少;
[0109]
肌肉类型m(7):20《s_1≤60而且
△
p》20,对磁耐受一般,腹部脂肪一般,肌肉较多;
[0110]
肌肉类型m(8):20《s_1≤60而且10《
△
p≤20,对磁耐一般,腹部脂肪一般,肌肉一般;
[0111]
肌肉类型m(9):20《s_1≤60而且
△
p≤10,对磁耐一般,腹部脂肪一般,肌肉较少;
[0112]
肌肉类型m(10):0《s_1≤20而且
△
p》20,对磁耐受低,腹部脂肪很少,肌肉较多
[0113]
肌肉类型m(11):0《s_1≤20而且10《
△
p≤20,对磁耐低,腹部脂肪很少,肌肉一般;
[0114]
肌肉类型m(12):0《s_1≤20而且
△
p≤10,对磁耐低,腹部脂肪很少,肌肉较少;
[0115]
第二次塑形为本发明公开的自适应调节,根据第一循环的最终刺激强度值s_1=35%和肌力值变化幅值
△
p=40,辨识此用户对此耐受一般,腹部脂肪一般,肌肉较多,选择调节策略t(7);耐受一般,故每次强度变化不能太大;脂肪厚度一般说明对疼痛不会太敏感,调节风险不大;肌肉较多说明较小的刺激参数调节就能抵消耐受和肌肉疲劳带来的影响。
[0116]
调节策略t(7)中,k
p
(i)=2、ti(i)=5、td(i)=3,第二循环强度稳定在38%,第三循环强度稳定在41%,第四循环强度稳定在43%,第五循环强度稳定在45%,第六循环强度稳定在46%。各个循环肌力值幅值稳定在40左右,塑形效果保持较好,如图7所示。
[0117]
本发明提供塑形磁刺激仪的自适应参数调节系统,如图2所示,所述系统包括:
[0118]
信号采集模块:所述信号采集模块用于实时采集当前用户目标肌群的收缩状态;所述信号采集模块包括压力气囊、导气管、压力传感器、气泵、电磁阀;所述压力气囊连接压力传感器,且所述压力气囊安装在磁刺激仪的线圈拍头上;所述压力气囊连接气泵,且所述压力气囊连接导气管,所述导气管内安装电磁阀;利用压力传感器的压力值表征肌肉收缩时的肌力值,实现采集肌肉的状态信号;采集的肌肉状态信号还可以是皮肤表面肌电信号,使用压力传感器和流体装置采集的压力信号,基于机械波(频率在10hz~10
10
hz)或电磁波(频率在10hz~10
20
hz)的图像信号;表面肌电信号使用贴在目标肌群上有缺口的圆形碳纤
维电极;压力信号是在采集装置内填充气体或液体等流体,目标肌肉在被刺激时形变引起流体变化而采集到的信号;图像信号可以是超声成像、可见光成像、红外、微波成像、x线成像、x-ct成像、磁共振成像、核素成像、分子成像等。
[0119]
信号处理模块:所述信号处理模块连接信号采集模块,所述信号处理模块用于对采集信号进行处理,将信号变换成容易分析与识别的肌力值,采集磁刺激仪输出的实时刺激参数;
[0120]
单片机:所述单片机连接所述信号处理模块,所述单片机用于接受、储存、处理肌力值和刺激参数;所述单片机通过控制压力气囊实时气压,结合信号采集模块采集的信息辨识当前用户的肌肉类型,确定当前用户的自适应强度调节策略,确定出用户后续循环的刺激参数;单片机的型号包括但不限于stm32、gd32。
[0121]
通信模块:所述通信模块连接单片机;所述通信模块包括有线通信和无线通信,所述有线通信包括std和camac总线、isa总线、vxi总线、pci、compact及pxi总线、rs-232c、rs-422a、rs-485、usb、ieee-1943、ieee488、scsi总线、mxi总线中的一种或者多种;所述无线通信包括ieee802.15.4协议、zigbee协议、蓝牙协议、lora以及uwb通信方式中的一种或者多种。
[0122]
显示模块:所述显示模块连接通信模块,所述显示模块用于显示实时肌力曲线、肌力值、磁刺激参数;显示模块显示的界面如图4所示。
[0123]
磁刺激仪:所述磁刺激仪连接通信模块,所述磁刺激仪通过通信模块接受单片机发送的信号,发射相应频率、强度、脉冲数、间隔、时长的电磁波给线圈拍头,线圈拍头将电磁波作用于人体目标肌肉进行塑形。
[0124]
塑形磁刺激仪的自适应参数调节系统,还包括
[0125]
安全按钮:所述安全按钮用于启停磁刺激仪;
[0126]
和\或红外遥控器:其中红外发射器处于磁刺激仪实用者可操作的位置,红外接收器通过逻辑控制部件控制磁刺激仪的启停;
[0127]
还可通过语音控制和手势控制启停磁刺激仪,用于解决可能存在参数增加超过用户疼痛阈值而引起不适的情况。
[0128]
本发明通过实时采集目标肌群肌力值,根据第一循环中时最终刺激参数和肌力值变化幅度辨识出用户肌肉类型,根据辨识的肌肉类型确定当前用户的自适应强度调节策略,在之后的循环中根据刺激参数和肌力值以及自适应强度调节策略自动调节刺激参数,使目标肌群处于最适合的收缩状态,从而保证塑形效果;本发明引入客观指标,使得塑形过程可视化,从而更加安全可靠,每一塑形循环达到最合适当前用户的顶峰收缩,从而提高塑形效果,节省治疗师资源,降低人工成本。
[0129]
本发明的技术范围不仅仅局限于上述说明中的内容,本领域技术人员可以在不脱离本发明技术思想的前提下,对上述实施例进行多种变形和修改,而这些变形和修改均应当属于本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1