一种踝泵运动训练装置及训练方法
1.本发明涉及康复保健技术领域,具体涉及一种踝泵运动训练装置及训练方法。
背景技术:
2.踝泵运动是指通过下肢肌肉收缩带动踝关节运动,使下肢肌肉起到像泵一样的作用,促进下肢血液和淋巴循环。踝泵运动对于长期卧床病人的心肺功能保持,下肢术后患者的功能恢复,以及久坐办公的亚健康人士预防心脑血管隐患有着至关重要的作用。可以明显促进下肢肿胀消退、预防深静脉血栓形成。以上人群往往缺乏踝泵运动意识或主动运动能力。冒然随性运动易造成损伤。
3.现有技术中机电控制技术具有通用性,有利于形成复杂的控制过程。通常利用存储器存储机电控制过程的程序代码,利用处理器处理程序代码形成控制信号,控制信号直接或经功率放大驱动执行机构。机电结构与机电控制技术配合可以满足适用人群的踝泵运动期望。形成能够复现真实踝泵动作细节的机械动作结构是实现踝泵运动仿真的关键。
技术实现要素:
4.鉴于上述问题,本发明实施例提供一种踝泵运动训练装置及训练方法,协助使用者安全、有效地完成踝泵运动。
5.本发明实施例的踝泵运动训练装置,包括:
6.机电控制模块,用于根据预置运动策略响应使用者需求,形成机电控制信号序列,控制相应动作机构动作;
7.机电动作结构,用于在脚踝部位形成支撑下肢关节的动作机构,根据控制信号序列带动脚踝运动或随动脚踝运动。
8.本发明一实施例中,所述机电控制模块包括:
9.存储器,用于存储与预置运动策略对应的程序代码和控制数据;
10.处理器,用于根据用户需求形成预置运动策略的机电控制信号序列,控制对应动作机构动作;
11.控制面板,用于接收使用者需求形成运动策略选择和参数配置数据;
12.压力传感器,用于采集脚踝部不同部位的压力变化信号,形成调整预置运动策略的反馈数据;
13.旋转编码器,用于采集动作机构中的电机输出轴转速信号,形成调整预置运动策略的反馈数据。
14.本发明一实施例中,所述机电动作结构包括:
15.脚踝定位机构,用于提供踝部、足跟部和趾掌部的固定结构;
16.足底转动机构,用于在脚踝定位机构的足跟部形成受控转动的支撑结构;
17.基座,用于形成机电部件容纳空间的刚性壳体并设置固定移动轨迹;
18.足底支撑机构,用于形成沿固定移动轨迹受控移动的与足底转动机构配合的支撑
结构;
19.背伸调节机构,用于在脚踝定位机构的趾掌部形成受控调节结构张力的支撑结构。
20.本发明一实施例中,所述基座包括支撑结构,在支撑结构上形成第一驱动电机容纳空间、固定移动轨迹和固定移动轨迹上方的开放性移动空间。
21.本发明一实施例中,所述足底支撑机构包括第一驱动电机、与第一驱动电机输出轴传动连接的第一配合结构,通过第一驱动电机带动第一配合结构沿固定移动轨迹移动。
22.本发明一实施例中,所述脚踝定位机构包括脚踝固定结构固定单脚,在脚踝固定结构中设置脚趾部分的受限转动结构。
23.本发明一实施例中,所述背伸调节机构包括之间形成牵引连接的第三驱动电机和弹性储能部件,第三驱动电机固定在受限转动结构转动一侧,弹性储能部件固定在受限转动结构相对固定一侧。
24.本发明一实施例中,所述足底转动机构包括第二驱动电机、与第二驱动电机传动连接的第二配合结构、与第二驱动电机固定连接的第三配合结构,第二配合结构固定连接脚踝固定结构足跟部,第三配合结构与第一配合结构配合连接。
25.本发明实施例的踝泵运动训练方法,包括:
26.初始化随动运动模式:各驱动电机断电,各动作机构随动使用者脚踝的自主运动;
27.根据输入需求,建立主动运动模式:各驱动电机得电,根据预置主动运动策略结合输入需求形成控制信号序列,驱动对应动作机构带动使用者脚踝作被迫运动;
28.根据输入需求,建立被动运动模式:各驱动电机得电,根据使用者的自主运动状态,量化对抗自主动作的反向动作和动作强度形成控制信号序列,驱动对应动作机构抵制自主运动。
29.本发明实施例的踝泵运动训练装置,包括:
30.存储器,用于存储上述的踝泵运动训练方法中处理过程对应的程序代码;
31.处理器,用于执行所述程序代码。
32.本发明实施例的踝泵运动训练装置及训练方法通过形成机电控制结构,有效利用机电动作结构形成的动作自由度和控制维度,构建主动模式、被动模式、随动模式下的踝泵运动建立控制-采集-反馈的整体硬件架构和训练控制过程。可以实现促进下肢静脉回流,预防下肢深静脉血栓,增强下肢肌力和下肢肌肉量。进而增加身体活动和能量消耗,改善血压、血糖、血脂和体脂等指标。
附图说明
33.图1所示为本发明一实施例踝泵运动训练装置的架构示意图。
34.图2所示为本发明一实施例踝泵运动训练装置的机电动作结构中基座的侧视示意图。
35.图3所示为本发明一实施例踝泵运动训练装置的机电动作结构中基座的主视剖视示意图。
36.图4所示为本发明一实施例踝泵运动训练装置的机电动作结构的侧视视剖视示意图。
37.图5所示为本发明一实施例踝泵运动训练装置的机电动作结构中脚踝定位机构、足底转动机构和背伸调节机构的配合结构示意图。
38.图6所示为本发明一实施例踝泵运动训练装置的机电动作结构中脚踝定位机构和足底转动机构结合的后视示意图。
39.图7所示为本发明一实施例踝泵运动训练方法的流程示意图。
具体实施方式
40.为使本发明的目的、技术方案及优点更加清楚、明白,以下结合附图及具体实施方式对本发明作进一步说明。显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
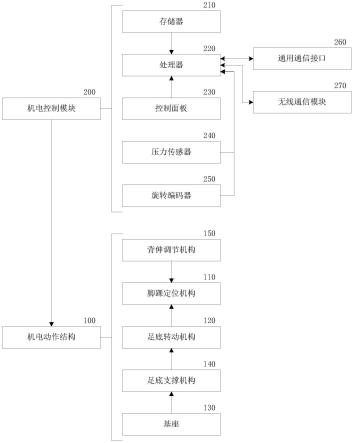
41.本发明一实施例的踝泵运动训练装置如图1所示,在图1中,包括:
42.机电控制模块200,用于根据预置运动策略响应使用者需求,形成机电控制信号序列,控制相应动作机构动作。
43.机电动作结构100,用于在脚踝部位形成支撑下肢关节的动作机构,根据控制信号序列带动脚踝运动或随动脚踝运动。
44.本领域技术人员可以理解,踝泵运动包括的运动状态具有多样性,不同的运动状态具有参与肌肉群、肌肉运动强度、运动姿态等明显区别。例如,跖屈(绷脚尖)时,小腿三头肌收缩变短,胫骨前肌放松伸长;背伸(勾脚尖)时,胫骨前肌收缩变短,小腿三头肌放松伸长。肌肉收缩时,血液和淋巴液受挤压回流,肌肉放松时,新鲜血液补充。通过这样简单的屈伸脚踝,可以有效促进整个下肢的血液循环。
45.仿真运动状态的多样性是对踝泵运动训练装置运动有效性的关键评价指标。真实踝泵运动在跖屈(绷脚尖)和背伸(勾脚尖)的过程中可以分解为包括但不限于踝部转动、脚掌踩踏、踮脚趾、勾脚趾、抬脚掌等动作状态,每个动作状态涉及一组肌肉肌腱的拉伸。机电动作结构可以形成针对仿真运动多样性的独立结构技术方案。本发明实施例的踝泵运动训练装置在提供了通过电信号驱动机械结构进行踝泵运动仿真的机电动作结构的同时,结合现有技术形成了驱动电信号生成数据处理过程的硬件配置环境。保证了踝泵运动运动仿真过程中具体预置运动策略和运动效果的实现。
46.如图1所示,在本发明一实施例中,机电动作结构100包括以下动作机构:
47.脚踝定位机构110,用于提供踝部、足跟部和趾掌部的固定结构。
48.本领域技术人员可以理解,利用现有冰鞋、拖鞋、休闲平底鞋或划船机等运动器械的脚部支撑结构,以及鞋带、粘扣和绑带等常用的绑定结构可以获得对脚踝部的可靠固定支撑。
49.足底转动机构120,用于在脚踝定位机构的足跟部形成受控转动的支撑结构。
50.采用驱动电机,通过设定电机固定基准,以脚踝定位机构与电机输出轴间通过配件形成固定连接,可以使得脚踝定位机构相对固定基准转动。
51.基座130,用于形成机电部件容纳空间的刚性壳体并设置固定移动轨迹。
52.通过刚性壳体上设置固定移动轨迹形成对脚踝的运动限制,考虑到适用人群多为病患或运动量小的久坐人士,为预防运动风险,运动限制在于限制踝泵运动中过于复杂的
踝部转动和踝部摆动。刚性壳体还用于形成稳定的固定基础。
53.足底支撑机构140,用于形成沿固定移动轨迹受控移动的与足底转动机构配合的支撑结构。
54.沿固定移动轨迹受控移动在足底转动机构对脚踝定位机构110形成转动支撑基础上,对足底转动机构构成移动支撑,为受限的踝泵运动提供额外的运动控制维度。
55.采用驱动电机,通过设定电机固定基准,电机输出轴与足底转动机构间通过传动配件形成固定连接,可以使得足底转动机构沿固定移动轨迹受控移动,使得脚踝定位机构形成相对移动。
56.本发明实施例中,脚踝定位机构110指向、足底转动机构120转动方向与固定移动轨迹朝向一致。
57.本发明实施例的踝泵运动训练装置通过机电动作结构在踝泵运动中确定固定运动朝向,在运动朝向上形成转动和移动两个动作机构,提供了两个控制维度的机电结构,实现了三个运动自由度的有效控制,扩展了脚踝部在确定运动方向上的运动灵活性。可以充分适用不同使用者的运动差异。
58.如图1所示,在发明一实施例中,还包括:
59.背伸调节机构150,用于在脚踝定位机构的趾掌部形成受控调节结构张力的支撑结构。
60.趾掌部关节较多,参与脚掌踩踏、踮脚、勾脚趾、抬脚掌等动作时存在与使用者运动生理习惯相关的独立动作,需要特定结构针对性配合。
61.采用驱动电机,通过设定电机固定基准,电机输出轴与储能装置建立牵引连接可以使得脚踝定位机构的局部结构张力形成改变。
62.本发明实施例的踝泵运动训练装置通过背伸调节机构构成独立的运动自由度,可以适配使用者个体运动特征,有针对性的改善用户动作体验。同时,作为额外提供的一个控制维度,可以满足踝泵运动仿真中机电控制过程的进一步优化。
63.如图1所示,在本发明一实施例中,机电控制模块200包括:
64.存储器210,用于存储与预置运动策略对应的程序代码和控制数据。
65.处理器220,用于根据用户需求形成预置运动策略的机电控制信号序列,控制对应动作机构动作。
66.处理器可以采用dsp(digital signal processor)数字信号处理器、fpga(field-programmable gate array)现场可编程门阵列、mcu(microcontroller unit)系统板、soc(system on a chip)系统板或包括i/o的plc(programmable logic controller)最小系统。
67.控制面板230,用于接收使用者需求形成运动策略选择和参数配置数据。
68.控制面板包括但不限于常用的键盘、触摸屏或开关按钮。
69.压力传感器240,用于采集脚踝部不同部位的压力变化信号,形成调整预置运动策略的反馈数据。
70.压力传感器可以根据脚踝定位机构的承压结构特点独立设置、线性设置或矩阵设置,形成同类型信号不同部位的并行采集结构。以更好地获得足底压力变化反馈。
71.旋转编码器250,用于采集动作机构中的电机输出轴转速信号,形成调整预置运动
策略的反馈数据。
72.控制信号形成电机的预期转速和功率。通过旋转编码器反馈的实时转速可以评估电机工作状态,进而形成预置运动策略中输出功率、动作频率、动作幅值或动作角度的调整。
73.本发明实施例的踝泵运动训练装置通过形成机电控制结构,有效利用机电动作结构形成的动作自由度和控制维度,构建主动模式、被动模式、随动模式下的踝泵运动建立控制-采集-反馈的整体硬件架构。
74.如图1所示,本发明一实施例中,机电控制模块包括:还包括:
75.通用通信接口260,用于与其他踝泵运动训练装置进行数据通信。
76.通用通信接口可以采用的类型包括但不限于usb接口或com接口。
77.无线通信模块270,用于与其他数据终端形成无线通信链路。
78.无线通信模块以采用的类型包括但不限于wifi或蓝牙。
79.处理器220,还用于控制通用通信接口和无线通信链路的建立和数据交换。
80.处理器利用通用通信接口可以形成传统的主从通信方式传输数据,利用无线通信模块形成传统的对等通信方式传输数据。
81.本发明一实施例踝泵运动训练装置的机电动作结构中基座如图2、图3所示。其中:基座包括支撑结构,在支撑结构上形成第一驱动电机容纳空间、固定移动轨迹和固定移动轨迹上方的开放性移动空间。
82.具体的,结合图2和图3,基座130包括平行的轴对称设置的一对中空的矩形箱体131、一个后端板132、一个底端板133和一个弧形挡板134,后端板132竖直固定在两个矩形箱体131后端,底端板133水平固定在两个矩形箱体131底部,后端板132与底端板的相邻端形成整体连接棱135。弧形挡板134展平为一矩形,弧形挡板轴向与矩形箱体131垂直固定,两端固定在两个矩形箱体131的相邻侧壁上。弧形挡板134与整体连接棱135两侧的后端板132与底端板围成一个横置腔体136,横置腔体内壁向两侧矩形箱体131投影范围内矩形箱体131的相邻侧壁消除,形成横置腔体136对称的横置通孔137。本发明一实施例踝泵运动训练装置的机电动作结构中足底支撑机构如图3、4所示。结合图3和图4,在矩形箱体131间的相邻侧壁上且在横置腔体136上方轴对称设置固定移动轨迹,固定移动轨迹为一劣弧通孔141,劣弧通孔141的弧形圆心位于相邻侧壁前上部,处于弧形远离横置腔体136一侧。劣弧通孔141中沿延伸方向的相对孔壁间距保持一致。
83.本发明实施例的训练装置的基座构型可以保证安置稳定性。整体重量靠近整体连接棱,移动轨迹为劣弧形,在沿整体连接棱站东90度后仍可以保持稳定,这样有利于一套装置可以适用于坐姿和正卧的使用。
84.本发明一实施例踝泵运动训练装置的机电动作结构中,足底支撑机构包括第一驱动电机、与第一驱动电机输出轴传动连接的第一配合结构,通过第一驱动电机带动第一配合结构沿固定移动轨迹移动。
85.具体的,结合图2和图3所示,足底支撑机构140包括两套,分别轴对称设置在两个矩形箱体131中。结合图3和图4,足底支撑机构140包括第一驱动电机142、第一传导齿轮143、第二传导齿轮144、第三传导齿轮145、第四传导齿轮146、传导连杆147和同步齿轮带148,第一驱动电机142固定在横置腔体中,与横置腔体136共轴向,电机输出轴142a指向矩
形箱体131的相邻侧壁在伸出横置腔体136的横置通孔137后在输出轴142a端部固定第一传导齿轮143,第一传导齿轮143随输出轴142a转动。在劣弧通孔141两端外侧分别设置第二传导齿轮144和第三传导齿轮145,第二传导齿轮144和第三传导齿轮145的固定中心轴两端转动固定在矩形箱体131的相对侧壁上。第四传导齿轮146的固定中心轴位于劣弧通孔141弧形圆心处,固定中心轴两端转动固定在矩形箱体131的相对侧壁上。传导连杆147的固定端包括贯通通孔,第四传导齿轮146的固定中心轴穿过贯通通孔,传导连杆147的固定端固定在第四传导齿轮146轮面(或固定中心轴)上,随第四传导齿轮146转动,传导连杆147的移动端位于劣弧通孔141延伸方向的相对孔壁范围内。同步齿轮带148顺序围绕第一传导齿轮143、第二传导齿轮144、第三传导齿轮145和第四传导齿轮146外周形成封闭路径且保持张力,传输带内壁设置与各传导齿轮啮合的轮齿。第一传导齿轮143、第二传导齿轮144、第三传导齿轮145和第四传导齿轮146的固定中心轴平行且轮齿位于于同一平面。
86.如图2所示,还包括同步连杆149,用于随动传导连杆147与足底转动机构120适配固定。同步连杆149的两端分别固定在两套足底支撑机构140的传导连杆147的移动端。同步连杆149随第四传导齿轮146转动,传导连杆147带动同步连杆149在劣弧通孔141中移动。
87.同步连杆149包括一对平行的适配短杆149a,适配短杆149a垂直固定在同步连杆149侧壁上,适配短杆149a与传导连杆147共延伸方向。
88.在实际应用中,两套足底支撑机构140同步受控。第一驱动电机142输出转动功率至第一传导齿轮143,通过同步齿轮带148将驱动力传递至第四传导齿轮146带动传导连杆147沿劣弧通孔141延伸轨迹摆动,两侧的传导连杆147带动同步连杆149在劣弧通孔141中移动,提供x、y两个运动自由度的既定合成运动方向。
89.本发明实施例的踝泵运动训练装置,通过两套足底支撑机构提供移动轨迹上足够的受控功率输出并形成驱动冗余度。利用传到轮奸的齿数比优化移动速率和移动精度。保证了脚踝部支撑结构可以与主体基座分离,实现了使用者应用的灵活性。
90.本发明一实施例踝泵运动训练装置的机电动作结构中结合的脚踝定位机构、足底转动机构和背伸调节机构如图5所示。脚踝定位机构包括脚踝固定结构固定单脚,在脚踝固定结构中设置脚趾部分的受限转动结构。
91.具体的,在图5中,脚踝定位机构110包括足跟部支撑平板111、脚掌部支撑平板112和趾掌部支撑平板113,足跟部支撑平板111与脚掌部支撑平板112间通过伸缩结构114固定连接,脚掌部支撑平板112和趾掌部支撑平板113间通过铰接结构115固定连接。足跟部支撑平板111顶部后端设置包覆足跟及脚踝部分的韧性鞋帮111a,韧性鞋帮111a两端设置相互配合的卡扣、粘扣或系带,用于将足跟及脚踝固定在足跟部支撑平板111顶部。趾掌部支撑平板113的顶部前端设置包覆脚趾的韧性鞋面113a,用于将脚趾容纳固定在韧性鞋面113a与趾掌部支撑平板113之间。
92.如图5所示,伸缩结构114包括固定在足跟部支撑平板111前端的调节板114a和开设在脚掌部支撑平板112后端的调节深槽114b,调节板114a和调节深槽114b的轮廓相互配合。调节板114a底面上沿伸展方向等距开设定位盲孔114c,在脚掌部支撑平板112后端底部,在调节深槽114b上开设一个定位销孔114d,在定位销孔114d弹性固定一个定位销114e,定位销受弹性弹簧约束可以在定位销孔114d中进出移动。通过定位销114e与不同定位盲孔114c配合固定可以调节脚踝定位机构110的整体长度,以适应使用者生理需求。
93.如图5所示,铰接结构115设置在脚掌部支撑平板112前端和趾掌部支撑平板113后端的顶部,脚掌部支撑平板112的前端和趾掌部支撑平板113的后端贴合。交接位置使得趾掌部支撑平板113可以向上转动,但由于脚掌部支撑平板112的前端和趾掌部支撑平板113的后端贴合而使得趾掌部支撑平板113与脚掌部支撑平板112平齐后不能向下转动。
94.本发明实施例的踝泵运动训练装置,提供了对脚踝部的适应性固定结构。同时针对脚趾的灵活性和生理功能提供了功能性活动支撑结构。保证了踝关节以下各活动关节的固定稳定性和灵活性。
95.本发明一实施例踝泵运动训练装置的机电动作结构中背伸调节机构包括之间形成牵引连接的第三驱动电机和弹性储能部件,第三驱动电机固定在受限转动结构转动一侧,弹性储能部件固定在受限转动结构相对固定一侧。
96.具体的,如图5所示,在本发明一实施例中,背伸调节机构150包括第三驱动电机151、一对立柱弹簧152和一对固定凸起153,在趾掌部支撑平板113的前端底部开设电机凹槽154,将第三驱动电机151的壳体固定在电机凹槽154中,第三驱动电机151的两端伸出输出轴,输出轴的轴向与趾掌部支撑平板113的延伸方向垂直,输出轴的两个端部分别共轴固定牵引轮155,牵引轮155部分边缘突出趾掌部支撑平板113底部,牵引轮155的周向轮面为中部低于两侧的弧面。一对固定凸起153轴对称固定在脚掌部支撑平板112的前端底部两侧。每个立柱弹簧152的前端通过低延展线缆固定在同侧牵引轮155的轮面上。每个立柱弹簧152的后端通过低延展线缆固定在同侧固定凸起153上。低延展性线缆采用超高分子量聚乙烯纤维、aramid纤维等有机材料制成。通过第三驱动电机151受控带动牵引轮155转动可以改变立柱弹簧152的拉力,进而改变脚趾参与勾脚动作时克服立柱弹簧152拉力的肌肉群的紧张程度。
97.本发明实施例的踝泵运动训练装置,通过背伸调节机构实现对真实踝泵运动中脚趾动作的训练针对性。对脚趾行为辨识度的适应性结构保证了后续模式控制中运动策略的适应性,有效提升了了踝泵运动仿真质量。
98.本发明一实施例踝泵运动训练装置的机电动作结构中脚踝定位机构和足底转动机构结合如图6所示。足底转动机构包括第二驱动电机、与第二驱动电机传动连接的第二配合结构、与第二驱动电机固定连接的第三配合结构,第二配合结构固定连接脚踝固定结构足跟部,第三配合结构与第一配合结构配合连接。
99.具体的,结合图5和图6,在本发明一实施例中,足底转动机构120包括第二驱动电机121、一对t形固定板122和一个适配挡块123,第二驱动电机121位于足跟部支撑平板111的下方与足跟部支撑平板111保持间隔,输出轴由电机两端伸出,输出轴轴线与足跟部支撑平板111的延展轴向垂直。一对t形固定板122轴对称固定在足跟部支撑平板111的两侧端面上,t形固定板122的水平部分固定在足跟部支撑平板111上,固定板122的竖直部分的末端固定在驱动电机121的同侧输出轴上,t形固定板122随第二驱动电机121的输出轴转动。适配挡块123固定在第二驱动电机121壳体上,适配挡块123底部形成两个倾斜角度的固定面123a,每个固定面123a包括与同步连杆149上适配短杆149a配套的适配盲孔124。
100.在实际应用中,第二驱动电机121以适配挡块123与足底支撑机构的同步连杆149适配连接形成第二驱动电机121的转动基准,以第二驱动电机121的输出轴带动足底转动机构120受控转动,进而形成被支撑足部的受力矢量变化。同时,利用铰接结构115和背伸调节
机构150配合形成趾掌部支撑平板113的平衡张力,背伸调节机构150的第三驱动电机151调节平衡张力并作用在脚趾踮脚或勾脚动作上。
101.如图5所示,在本发明一实施例中,在脚踝定位机构110的足跟部支撑平板111、脚掌部支撑平板112和趾掌部支撑平板113的顶部设置鞋垫116,在鞋垫116和足跟部支撑平板111、脚掌部支撑平板112和趾掌部支撑平板113之间设置压力传感器240。
102.在本发明一实施例中,对应各驱动电机设置旋转编码器,用于采集输出轴转速。
103.本发明一实施例踝泵运动训练方法如图7所示。包括:
104.s100:设置机电动作结构形成。
105.机电动作结构可以采用上述实施例的训练装置。
106.如图7所示,在本发明一实施例中,具体的设置过程,包括:
107.s110:设置支撑结构,在支撑结构上形成第一驱动电机容纳空间、固定移动轨迹和固定移动轨迹上方的开放性移动空间;
108.s120:设置第一驱动电机、与第一驱动电机输出轴传动连接的第一配合结构,通过第一驱动电机带动第一配合结构沿固定移动轨迹移动。
109.s130:设置脚踝固定结构固定单脚,在脚踝固定结构中设置脚趾部分的受限转动结构。
110.s140:设置第二驱动电机、与第二驱动电机传动连接的第二配合结构、与第二驱动电机固定连接的第三配合结构,第二配合结构固定连接脚踝固定结构足跟部,第三配合结构与第一配合结构配合连接。
111.s150:设置之间形成牵引连接的第三驱动电机和弹性储能部件,第三驱动电机固定在受限转动结构转动一侧,弹性储能部件固定在受限转动结构相对固定一侧。
112.s200:初始化随动运动模式:各驱动电机断电,各动作机构随动使用者脚踝的自主运动。
113.在训练装置中,第一驱动电机可以带动使用者脚踝沿固定轨迹移动,第二驱动电机可以带动使用者脚踝在移动过程中以足跟为支点转动,第三驱动电机可以带动使用者脚趾进行转动。当各驱动电机断电时,电机处于自由随动状态,各电机所处的足底支撑机构140、足底转动机构120和背伸调节机构150仅用作使用者脚踝的灵活支撑和固定。在满足动作机构运动范围的前提下,动作机构的机械传动随动使用者脚踝的自主运动。
114.s300:根据输入需求,建立主动运动模式:各驱动电机得电,根据预置主动运动策略结合输入需求形成控制信号序列,驱动对应动作机构带动使用者脚踝作被迫运动。
115.输入需求包括通过控制面板获取的量化需求,包括但不限于运动策略选择、运动策略执行时长和运动强度等运动预期的量化参数。预置主动运动策略经量化参数调整形成控制信号序列。控制信号序列用于对各驱动电机进行同步控制,使得脚踝的相关关节做出预期动作,带动与脚踝部关联的肌肉肌腱作被迫运动。
116.s400:设置第二机电动作结构,复制机电控制信号序列形成第二机电控制信号序列,在第二机电控制信号序列中提供动作整体延后的偏移时序参数,两个机电控制信号序列驱动对应动作机构带动使用者双脚脚踝交替作被迫运动。
117.两个机电动作结构可以通过内置的通用通信接口形成通信链路并形成数据传输实现数据复制。通过偏移时序参数形成两个机电控制信号序列间的可预期动作差异,实现
使用者双脚脚踝交替作被迫运动。
118.s500:根据输入需求,建立被动运动模式:各驱动电机得电,根据使用者的自主运动状态,量化对抗自主动作的反向动作和动作强度形成控制信号序列,驱动对应动作机构抵制自主运动。
119.输入需求包括通过控制面板获取的量化需求,包括但不限于运动动作选择、相应运动策略执行时长和运动强度等运动预期的量化参数。预置被动运动策略是针对踝泵运动中确定动作的专项训练控制过程,经量化参数调整形成控制信号序列。控制信号序列用于对专项训练中的各驱动电机进行同步控制,在使用者的动作过程中根据动作状态形成对抗性的电机功率受控输出,使得使用者动作阻力增加,迫使动作关联的肌肉肌腱增强运动。
120.本发明实施例的踝泵运动训练方法充分利用机电动作结构中各动作机构的机械结构特点,根据踝泵运动的适用场景形成运动模式差异。随动运动模式利用电机断电形成,以适应使用者的自主运动,作为约束踝泵运动方式减小运动损伤,满足使用者在狭小空间内的基础运动需求。主动运动模式通过有序控制驱动电机的输出功率迫使使用者下肢做出预期运动,形成对肌肉肌腱、深层血管血液循环和基础代谢量的主动促进,克服久坐、久卧潜在风险。被动运动模式针对使用者主观意愿控制驱动电机做出增加使用这动作难度的对抗性的输出功率,通过逐渐增强对抗强度,促使脚踝部特定关节和肌肉群的功能增长,满足患者或高危人群的保健康复。可以实现促进下肢静脉回流,预防下肢深静脉血栓,增强下肢肌力和下肢肌肉量。进而增加身体活动和能量消耗,改善血压、血糖、血脂和体脂等指标。
121.如图7所示,在本发明一实施例中,主动模式包括:
122.s310:获取使用者姿态;使用者存在正坐或正卧姿态,姿态改变会使传感器采集信号阈值、对结构的压力跳变位置以及使用者耐受程度产生趋势性影响,需要作为控制权重数据量化。
123.s320:根据使用者姿态量化各驱动电机初始输出功率水平;直接的控制权重数据体现在各驱动电机初始输出功率水平,例如正卧时第一驱动电机的初始输出功率是正坐时的70%,正卧时第二驱动电机的初始输出功率是正向大于反向50%,正卧时第三驱动电机的初始输出功率是降低50%。
124.s330:根据交互输入确定主动运动策略集合;通过交互输入获得必要的、格式化的单一动作选择、连续动作选择和动作调整数据的输入集合。
125.s340:根据交互输入量化主动运动策略集合中每个主动运动策略的控制参数;输入集合中的动作调整数据包括但不限于动作时长、动作强度和动作频率等,通过动作调整数据修正主动运动策略对应的标准动作参数形成修正动作参数。
126.s350:根据控制参数和初始输出功率水平,初始化足跟部的移动起始位置和转动起始位置,脚趾部初始张力;根据修正动作参数、初始输出功率水平和第一个运动动作设置初始状态并保持固定。
127.s360:根据控制参数形成主动运动策略集合的机电控制信号序列并缓存;对应修正动作参数将主动运动策略集合中的动作转换为控制信号序列,实现运动过程缓存。
128.s370:使能各驱动电机形成踝泵运动。使能形成供电运行,形成时序化运动过程。
129.如图7所示,在本发明一实施例中,被动模式包括:
130.s510:获取使用者姿态;使用者姿态会形成控制权重数据。
131.s520:获取使用者输入的抵制强度;
132.s530:采集各动作机构中驱动电机的即时转速;转速包括速率和方向,通过转动编码器获得。
133.s540:采集施压面积内压力变化数据,形成施压面积内各区域即时压力的受力矢量分布趋势;通过布设的压力传感器器获得。
134.s550:通过受力矢量分布趋势形成各驱动电机的电机驱动方向上的即时受力合成矢量;电机驱动方向通常处于正向或反向。
135.s560:根据即时转速和即时受力合成矢量形成对应各驱动电机的被动功率状态;即与各驱动电机对应的由使用者施压形成的等效功率。
136.s570:形成克服各驱动电机被动功率状态的各驱动电机的抵制功率,通过抵制强度和使用者姿态调整功率实时输出,抵制自主运动。
137.本发明一实施例踝泵运动训练方法中主动运动策略,试举例如下表:
[0138][0139]
本发明一实施例踝泵运动训练装置,包括:
[0140]
存储器,用于存储上述实施例的踝泵运动训练方法中处理过程对应的程序代码;
[0141]
处理器,用于执行上述实施例的踝泵运动训练方法中处理过程对应的程序代码。
[0142]
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应该以权利要求书的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1