一种踝足力量训练器的制作方法
1.本发明涉及医疗器械技术领域,具体为一种踝足力量训练器。
背景技术:
2.踝关节对于人体来说是非常重要的承重关节和运动关节,在人体进行站立和行走时踝关节承载着人体的大部分重量,并且走、跑、跳时都需要通过踝关节的多种角度活动来维持人体的平衡状态。
3.偏瘫又叫半身不遂,是指同一侧上下肢、面肌和舌肌下部的运动障碍,是急性脑血管病的常见症状。轻度偏瘫病人虽然尚能活动,但走起路来,往往上肢屈曲,下肢伸直,瘫痪的下肢走一步划半个圈,这种特殊的走路姿势,叫做偏瘫步态
4.现有的踝关节训练器,如说明书附图一,主要适用于偏瘫患者,主要作用时偏瘫患者踝关节训练时其踝背伸的动作,用于预防下肢静脉血栓。
5.目前,现有的偏瘫患者在进行足踝力量训练时,患者由于患肢一侧的肌肉长时间未进行活动,导致患者脚部的胫前肌力量非常薄弱,而腓骨长肌的力量非常大,脚部两边的肌肉严重失衡导致患者出现足内翻的现象,因此导致出现患肢处无法进行伸直,虽然现有的踝关节训练器,能够对患者进行有效的训练,但是一方面患者患肢位置的脚部常常出现无力以及僵硬的现象,进而导致其脚部无法稳定的放置在脚踏板上,另一方面在将其脚部放置在脚踏板上后,出现脚内翻的现象,若直接使用脚踏板上的固定绑带对患者脚部进行固定,则容易出现导致患者脚踝损伤的现象,为此,我们提出一种踝足力量训练器。
技术实现要素:
6.本发明的目的在于提供一种踝足力量训练器,以解决上述背景技术中提出的问题。
7.为实现上述目的,本发明提供如下技术方案:一种踝足力量训练器,包括座椅、设置在座椅底部的支撑座,支撑座的一端安装有延长板,所述延长板的一端安装有两个脚踏板,两个所述脚踏板之间固定连接有旋转轴,且旋转轴转动连接在延长板上,支撑座上安装有两个手柄,两个所述手柄通过支撑座与延长板之间设有的控制机构对旋转轴进行手动控制,所述脚踏板上设有开口,且开口处设有抚平件,所述抚平件用于对偏瘫患者脚部进行抚平;
8.所述开口外侧设有两个脚扣,两个所述脚扣内侧设有防护垫,所述脚踏板上设有用于对两个防护垫的张合进行控制的闭合机构;
9.所述支撑座靠近延长板的一侧设有两个抬升件,所述抬升件在患者坐在座椅上,对其腿部进行往复抬升训练的同时,辅助其脚部放置在脚踏板上;
10.所述座椅上安装有控制按钮。
11.优选的,所述控制机构包括与两个手柄之间固定连接的连接轴,连接轴转动贯穿支撑座;
12.支撑座上设有容纳槽,且容纳槽处设有传动件,所述延长板对应传动件的位置设有限位槽,且延长板顶部设有与限位槽连通的移动口,所述移动口处滑动连接有移动块,且容纳槽与限位槽之间设有用于对移动块相对于延长板的位置进行调节的调节件,所述移动块上设有连接槽,所述旋转轴连接在移动块上,且传动件的一端位于连接槽处且与旋转轴连接。
13.优选的,所述传动件包括固定套接在连接轴外侧的第一斜齿轮,所述第一斜齿轮外侧啮合连接有第二斜齿轮,所述第二斜齿轮底部固定连接有连接杆,且容纳槽内部安装有用于对连接杆进行支撑的连接块;
14.所述连接杆底部固定连接有第三斜齿轮,且第三斜齿轮外侧啮合连接有第四斜齿轮,所述第四斜齿轮外侧固定连接有转动杆,且转动杆的一端通过轴承转动连接在限位槽处;
15.所述转动杆外侧滑动套接有移动套,且移动套内部设有两个卡槽,所述转动杆外侧设有与两个卡槽滑动连接的卡条,所述移动套外侧转动套接有同步块,所述同步块滑动贯穿移动口且与移动块固定连接,所述移动套一端的外侧设有使旋转轴进行同步转动的同步件。
16.优选的,所述同步件包括固定套接在移动套外侧的第五斜齿轮,所述第五斜齿轮外侧啮合连接有第六斜齿轮,所述第六斜齿轮上固定连接有同步杆,且连接槽内部设有用于对同步杆进行支撑的同步块,所述同步杆顶部固定连接有第七斜齿轮,且第七斜齿轮外侧啮合连接有第八斜齿轮,所述第八斜齿轮处固定套接在旋转轴外侧,通过设有的同步件,从而实现对旋转轴进行驱动的作用。
17.优选的,所述调节件包括贯穿同步块的两个移动丝杆,两个所述移动丝杆的两端分别与容纳槽和限位槽转动连接,容纳槽处设有用于使两个移动丝杆进行同步转动的旋转件,通过设有的调节件,从而实现对同步块进行驱动的作用。
18.优选的,所述抚平件包括滑动连接在开口内部底端的支撑板,且开口内部设有用于对支撑板的支撑高度进行调节的升降件;
19.所述支撑板上固定连接有两个立板,两个所述立板之前转动连接有调节轴,其中一个立板上安装有用于对调节轴进行驱动的调节电机;
20.所述调节轴外侧固定套接有两个固定块,两个所述固定块之间固定连接有平板,所述平板上滑动连接有两个反向板,且平板上设有对两个反向板之间的距离进行同步调节的移动件;
21.所述反向板上转动连接有定位轴,且定位轴外侧固定套接有抚平辊,两个反向板相互靠近的两个定位轴的一端均固定连接有驱动斜齿轮,且平板上设有用于两个驱动斜齿轮进行同步转动的连接件;
22.所述反向板上多个定位轴之间连接有同步转动件,通过设有的抚平件,从而实现对患者脚部进行抚平调节的作用。
23.优选的,所述移动件包括设置在平板上的调节口,且调节口处转动连接有双向螺纹杆,所述平板的一端安装有用于对双向螺纹杆进行驱动的微型电机;
24.所述双向螺纹杆外侧螺纹套接有两个调节块,两个调节块滑动贯穿调节口处且与两个反向板固定连接,通过设有的移动件,从而实现两个反向板进行反向或相向移动的作
用。
25.优选的,所述连接件包括分别与两个驱动斜齿轮啮合连接的旋转斜齿轮,两个所述旋转斜齿轮外侧固定连接有旋转套,两个所述旋转套之间滑动连接有联动杆,所述联动杆外侧设有防护壳,且防护壳通过支杆固定安装在平板上;
26.所述防护壳的一端安装有用于对联动杆进行驱动的联动电机;
27.所述联动杆外侧固定安装有两个联动条,且旋转斜齿轮与旋转套滑动套接在两个联动条外侧,所述旋转套外侧转动套接有导向块,且导向块与反向板固定连接,通过设有的连接件,从而实现对两个驱动斜齿轮进行同步驱动的作用。
28.优选的,所述同步转动件包括与多个定位轴固定连接的同步齿轮,多个所述同步齿轮之间传动连接有同步链,多个所述同步齿轮外侧设有防护罩,且防护罩内部设有用于对同步链进行限位的限位杆,通过设有的同步转动件,从而实现多个定位轴进行同步转动的作用。
29.优选的,所述抬升件包括设置在支撑座外侧的抬升套,所述抬升套上固定连接有抬升杆,且抬升杆通过铰支座转动连接在座椅底部;
30.所述抬升杆背面通过铰支座转动连接有驱动支杆,且支撑座上固定安装有固定框,所述固定框上转动连接有定位丝杆,且定位丝杆外侧螺纹套接有抬升块,所述抬升块通过铰支座与驱动支杆转动连接,所述固定框上安装有用于对驱动支杆进行驱动的转动电机,通过设有的抬升件,从而起到对偏瘫患者脚部腿部进行抬升的作用。
31.本发明至少具备以下有益效果:
32.在对偏瘫患者踝足力量进行训练时,通过抬升件能够首先对患者患腿处进行往复抬升运动,实现对患者腿部进行锻炼以及肌肉放松的作用,防止患者腿部出现肌张力较大的现象,同时该抬升件能够辅助患者将其脚部稳定的放在脚踏板上,且通过抚平件,能够实现对患者内翻的脚部进行稳定抚平的作用,增加患脚处的血液循环,同时起到对患脚处进行放松的作用,进而保证偏瘫患者能够稳定将其脚底平放在脚踏板上,便于其进行踝足力量训练。
附图说明
33.图1为现有的踝关节训练器结构示意图;
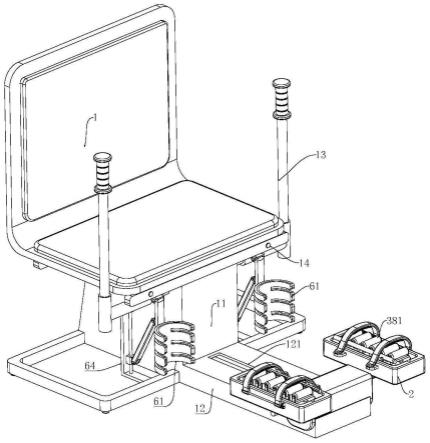
34.图2为本发明整体结构示意图;
35.图3为本发明座椅局部剖视结构示意图;
36.图4为本发明连接轴结构示意图;
37.图5为本发明调节件结构示意图;
38.图6为本发明图5中a区域放大结构示意图;
39.图7为本发明实施例二结构示意图;
40.图8为本发明脚踏板结构示意图;
41.图9为本发明脚扣结构示意图;
42.图10为本发明脚踏板处开口结构示意图;
43.图11为本发明支撑板结构示意图;
44.图12为本发明反向板结构示意图;
45.图13为本发明防护壳结构示意图;
46.图14为本发明抚平辊结构示意图;
47.图15为本发明抬升件结构示意图。
48.图中:1-座椅;11-支撑座;12-延长板;121-移动口;13-手柄;14-控制按钮;2-脚踏板;21-旋转轴;22-开口;3-抚平件;31-支撑板;32-升降件;321-升降丝杆;322-微型马达;33-立板;34-调节轴;35-调节电机;36-固定块;37-平板;38-反向板;381-抚平辊;39-移动件;391-双向螺纹杆;392-微型电机;393-调节块;4-脚扣;41-防护垫;5-闭合机构;51-支撑杆;52-支撑电机;6-抬升件;61-抬升套;62-抬升杆;63-驱动支杆;64-固定框;65-定位丝杆;66-抬升块;67-转动电机;7-控制机构;71-连接轴;72-传动件;721-第一斜齿轮;722-第二斜齿轮;723-连接杆;724-第三斜齿轮;725-第四斜齿轮;726-转动杆;727-移动套;728-同步块;73-移动块;74-调节件;741-移动丝杆;7411-旋转齿轮;7412-主动齿轮;7413-主动电机;7415-定位齿轮;7416-齿轮条;7417-电动推杆;742-旋转件;75-同步件;751-第五斜齿轮;752-第六斜齿轮;753-同步杆;754-第七斜齿轮;755-第八斜齿轮;9-定位轴;91-驱动斜齿轮;92-连接件;921-旋转斜齿轮;922-旋转套;923-导向块;924-联动杆;925-防护壳;926-联动电机;927-联动条;93-同步转动件;931-同步齿轮;932-同步链;933-防护罩。
具体实施方式
49.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
50.请参阅图2-6、7-15,本发明提供一种技术方案:
51.实施例一
52.一种踝足力量训练器,包括座椅1、设置在座椅1底部的支撑座11,支撑座11的一端安装有延长板12,延长板12的一端安装有两个脚踏板2,两个脚踏板2之间固定连接有旋转轴21,且旋转轴21转动连接在延长板12上,支撑座11上安装有两个手柄13,两个手柄13通过支撑座11与延长板12之间设有的控制机构7对旋转轴21进行手动控制;
53.控制机构7包括与两个手柄13之间固定连接的连接轴71,连接轴71转动贯穿支撑座11,连接轴71与支撑座11转动连接;
54.支撑座11上设有容纳槽,且容纳槽处设有传动件72,延长板12对应传动件72的位置设有限位槽,且延长板12顶部设有与限位槽连通的移动口121,移动口121处滑动连接有移动块73,且容纳槽与限位槽之间设有用于对移动块73相对于延长板12的位置进行调节的调节件74,移动块73上设有连接槽,旋转轴21连接在移动块73上,且传动件72的一端位于连接槽处且与旋转轴21连接;
55.传动件72包括固定套接在连接轴71外侧的第一斜齿轮721,第一斜齿轮721外侧啮合连接有第二斜齿轮722,第二斜齿轮722底部固定连接有连接杆723,且容纳槽内部安装有用于对连接杆723进行支撑的连接块;
56.连接杆723底部固定连接有第三斜齿轮724,且第三斜齿轮724外侧啮合连接有第四斜齿轮725,第四斜齿轮725外侧固定连接有转动杆726,且转动杆726的一端通过轴承转
动连接在限位槽处;
57.转动杆726外侧滑动套接有移动套727,且移动套727内部设有两个卡槽,转动杆726外侧设有与两个卡槽滑动连接的卡条,移动套727外侧转动套接有同步块728,同步块728滑动贯穿移动口121且与移动块73固定连接,移动套727一端的外侧设有使旋转轴21进行同步转动的同步件75;
58.同步件75包括固定套接在移动套727外侧的第五斜齿轮751,第五斜齿轮751外侧啮合连接有第六斜齿轮752,第六斜齿轮752上固定连接有同步杆753,且连接槽内部设有用于对同步杆753进行支撑的同步块728,同步杆753顶部固定连接有第七斜齿轮754,且第七斜齿轮754外侧啮合连接有第八斜齿轮755,第八斜齿轮755处固定套接在旋转轴21外侧;
59.调节件74包括贯穿同步块728的两个移动丝杆741,两个移动丝杆741的两端分别与容纳槽和限位槽转动连接,容纳槽处设有用于使两个移动丝杆741进行同步转动的旋转件742,旋转件742能够对两个移动丝杆741进行同步旋转驱动,且旋转件742包括分别固定套接在两个移动丝杆741外侧的旋转齿轮7411,两个旋转齿轮7411外侧设有主动齿轮7412,且主动齿轮7412与两个旋转齿轮7411之间传动连接有同步链932,且容纳槽内部安装有用于对主动齿轮7412进行驱动的主动电机7413,进一步的通过主动电机7413运行,从而使两个旋转齿轮7411在同步链932的传动下进行同步运行,实现对两个移动丝杆741进行同步驱动的作用;
60.具体实施过程:在进行使用时,当根据不同的偏瘫患者,其脚踏板2距离座椅1之间的距离根据患者进行调节时,则通过旋转件742运行,进一步的使两个移动丝杆741同步转动,当移动丝杆741转动的同时,提供同步块728同步驱动力,而由于同步块728在限位槽的限位下,进一步的带动移动套727相对于转动杆726外侧进行移动,且当移动套727移动的同时,进一步的通过同步块728带动移动块73相对于延长板12上进行移动调节,从而进一步的实现对脚踏板2相对于座椅1之间的距离进行调节的作用;
61.同时当需要对脚踏板2进行驱动时,则通过脚踩脚踏板2或者手动摆动手柄13,均可以使脚踏板2进行转动,如当进行手动摆动手柄13时,则其第一斜齿轮721带动第二斜齿轮722进行转动,同时第二斜齿轮722通过连接杆723带动第三斜齿轮724进行转动,而由于第四斜齿轮725与第三斜齿轮724啮合,因此转动杆726则通过卡条带动移动套727进行转动,当移动套727转动的同时,进而使第五斜齿轮751带动第六斜齿轮752进行转动,同时第六斜齿轮752上有同步杆753,进一步的通过第七斜齿轮754与第八斜齿轮755带动旋转轴21相对于移动块73进行转动,进一步的使两个脚踏板2相对于延长板12进行转动的作用。
62.脚踏板2上设有开口22,且开口22处设有抚平件3,抚平件3用于对偏瘫患者脚部进行抚平;
63.开口22外侧设有两个脚扣4,两个脚扣4内侧设有防护垫41,脚踏板2上设有用于对两个防护垫41的张合进行控制的闭合机构5,闭合机构5固定连接在两个脚扣4之间的支撑杆51,且支撑杆51转动连接在脚踏板2外侧,脚踏板2外侧安装有用于对支撑杆51进行驱动的支撑电机52;
64.支撑座11靠近延长板12的一侧设有两个抬升件6,抬升件6在患者坐在座椅1上,对其腿部进行往复抬升训练的同时,辅助其脚部放置在脚踏板2上;
65.座椅1上安装有控制按钮14。
66.抚平件3包括滑动连接在开口22内部底端的支撑板31,支撑板31滑动连接在开口22处,且开口22内部设有用于对支撑板31的支撑高度进行调节的升降件32,升降件32包括与支撑板31一端螺纹连接的升降丝杆321,且升降丝杆321底部转动连接在开口22处,脚踏板2顶部设有凹槽,且凹槽处安装有微型马达322,微型马达322输出端穿过凹槽与升降丝杆321固定连接,且微型马达322输出端与凹槽转动连接,进一步的通过微型马达322运行,从而使升降丝杆321能够相对于开口22处进行转动,并提供支撑板31驱动力,而支撑板31在开口22的限位下,进一步的相对于开口22处的高度进行调节的作用;
67.支撑板31上固定连接有两个立板33,两个立板33之前转动连接有调节轴34,其中一个立板33上安装有用于对调节轴34进行驱动的调节电机35,调节电机35固定安装在其中一个立板33上,且该调节电机35输出端穿过个对应的立板33与调节轴34固定连接,调节电机35输出端与立板33转动连接;
68.调节轴34外侧固定套接有两个固定块36,两个固定块36之间固定连接有平板37,平板37上滑动连接有两个反向板38,且平板37上设有对两个反向板38之间的距离进行同步调节的移动件39,移动件39包括设置在平板37上的调节口,且调节口处转动连接有双向螺纹杆391,平板37的一端安装有用于对双向螺纹杆391进行驱动的微型电机392;
69.双向螺纹杆391外侧螺纹套接有两个调节块393,两个调节块393滑动贯穿调节口处且与两个反向板38固定连接;
70.反向板38上转动连接有定位轴9,且定位轴9外侧固定套接有抚平辊381,该抚平辊381外侧套设有橡胶套,同时橡胶套外侧可设有多个按摩触头,从而同时起到对患者脚底板进行按摩的作用,两个反向板38相互靠近的两个定位轴9的一端均固定连接有驱动斜齿轮91,且平板37上设有用于两个驱动斜齿轮91进行同步转动的连接件92;
71.连接件92包括分别与两个驱动斜齿轮91啮合连接的旋转斜齿轮921,两个旋转斜齿轮921外侧固定连接有旋转套922,两个旋转套922之间滑动连接有联动杆924,联动杆924外侧设有防护壳925,且防护壳925通过支杆固定安装在平板37上;
72.防护壳925的一端安装有用于对联动杆924进行驱动的联动电机926;
73.联动杆924外侧固定安装有两个联动条927,且旋转斜齿轮921与旋转套922滑动套接在两个联动条927外侧,旋转套922外侧转动套接有导向块923,且导向块923与反向板38固定连接
74.反向板38上多个定位轴9之间连接有同步转动件93;
75.同步转动件93包括与多个定位轴9固定连接的同步齿轮931,多个同步齿轮931之间传动连接有同步链932,多个同步齿轮931外侧设有防护罩933,且防护罩933内部设有用于对同步链932进行限位的限位杆。
76.具体实施过程:当患者将其脚部放置在脚踏板2上时,由于偏瘫患者患脚处出现足内翻的现象,因此,此时,多个抚平辊381相对移动至开口22上方,即可按动控制按钮14,则同时通过调节电机35运行,进一步的使两个立板33带动平板37相对于开口22处进行一定角度的转动,直到多个抚平辊381与内翻的脚底进行贴合后,则联动电机926运行,从而使联动杆924相对于防护壳925进行转动,而当联动杆924转动的同时,同步使其上的两个旋转斜齿轮921进行转动,当旋转斜齿轮921转动的同时,通过驱动斜齿轮91,进一步的使对应的抚平辊381进行转动,而两组抚平辊381上分别在其上的连接件92作用下,进而同步转动,实现对
患者脚部肌肉进行推动放松的作用;
77.同时,通过微型电机392正方向转动,进一步的使双向螺纹杆391在调节口处进行转动,而当双向螺纹杆391转动的同时,提供两个反向板38相反方向的驱动力,进一步的使反向板38沿着相向或相反的方向进行转动,进一步的使两个反向板38上的多个抚平辊381相对于患者脚底部进行往复运动,从而加快对患者脚部肌肉进行放松,辅助其脚部稳定张开的作用,同时,平板37逐渐调节至与开口22水平位置,同时沿着开口22下移,直到多个抚平辊381顶部与开口22在同一水平面上,进而起到对患者脚部进行稳定支撑;
78.直到患者将其脚部平稳的放置在脚踏板2上后,则支撑电机52运行,从而使两个脚扣4对患者脚部进行固定的作用,进而便于患者进行踝足力量训练。
79.抬升件6包括设置在支撑座11外侧的抬升套61,抬升套61上固定连接有抬升杆62,且抬升杆62通过铰支座转动连接在座椅1底部;
80.抬升杆62背面通过铰支座转动连接有驱动支杆63,且支撑座11上固定安装有固定框64,固定框64上转动连接有定位丝杆65,且定位丝杆65外侧螺纹套接有抬升块66,抬升块66通过铰支座与驱动支杆63转动连接,固定框64上安装有用于对驱动支杆63进行驱动的转动电机67。
81.具体实施过程:当偏瘫患者坐在座椅1上时,其腿部出现僵硬而无法自主将脚部放在脚踏板2上时,则其小腿部位于抬升套61的位置,通过转动电机67运行,进一步的使定位丝杆65进行转动,而定位丝杆65转动的同时,提供抬升块66驱动力,而抬升块66在驱动支杆63的限位下,进一步的使抬升块66相对于固定框64进行上下移动,而驱动支杆63移动的同时,其另一端推动抬升套61进行移动,进一步的使患者患肢处进行往复锻炼运行,从而不仅能够放松腿部肌肉力量的作用,同时辅助其脚部放置在脚踏板2上,同时便于患者进行后期踝关节处进行锻炼。
82.请参阅图7,实施例2
83.区别于上述实施例1,本技术在此为上述实施例中旋转件742提供另外一种实施方式:
84.旋转件742包括分别固定套接在两个移动丝杆741外侧的两个定位齿轮7415,两个定位齿轮7415之间传动连接有齿轮条7416,且容纳槽内部安装有用于对齿轮条7416进行推动的电动推杆7417,从而通过电动推杆7417运行,进一步的使齿轮条7416带动两个定位齿轮7415进行同步转动,实现两个移动丝杆741进行同步转动的作用。
85.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
86.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1