一种具有柔性转向鞘的单孔多臂手术机器人
本发明涉及医疗器械,尤其涉及一种具有柔性转向鞘的单孔多臂手术机器人。
背景技术:
1、现代外科手术正经历由开放性手术到微创腔镜手术,再到机器人辅助手术的发展趋势。开放性手术术野暴露清晰,但创口大、失血多、瘢痕明显;微创腔镜手术需在病人身上开多个小创口、或单个较大尺寸创口,用以插入内窥镜和各种手术工具,具有失血少、瘢痕小的优点,但细长的刚性手术工具可操作性差,需要多名医护人员协作配合,手术效率较低;机器人辅助手术保留微创腔镜手术优点的同时,机械臂灵活度高、操作直观,可减少医护人员的人数需求,提高手术效率。
2、单孔微创手术机器人通过单一手术创口进入病人体内,在手术区域附近展开各操作臂及成像设备进行手术操作,其可进一步减小手术侵入性。传统单孔微创手术机器人多采用刚性直鞘结合多个操作臂的配置,刚性直鞘具有杠杆效应,即刚性直鞘在体内微小的姿改变需要体外驱动机构大幅度的运动,其难以适应具有弯曲入路的手术场景。此外,当前出现个别具有柔性外鞘的单孔微创手术机器人,但其柔性外鞘结构复杂、刚度不足、尺寸较大,给末端操作臂的稳定操作带来困难。
3、综上所述,如何通过单一小尺寸手术创口传递多个手术工具,如何解决单孔微创手术机器人刚性外鞘的杠杆效应问题是本领域技术人员亟待解决的问题。
技术实现思路
1、本发明的目的是提供一种具有柔性转向鞘的单孔多臂手术机器人,以解决现有单孔微创手术机器人所存在的杠杆效应问题和如何通过单一小尺寸创口传递多个手术工具的问题。
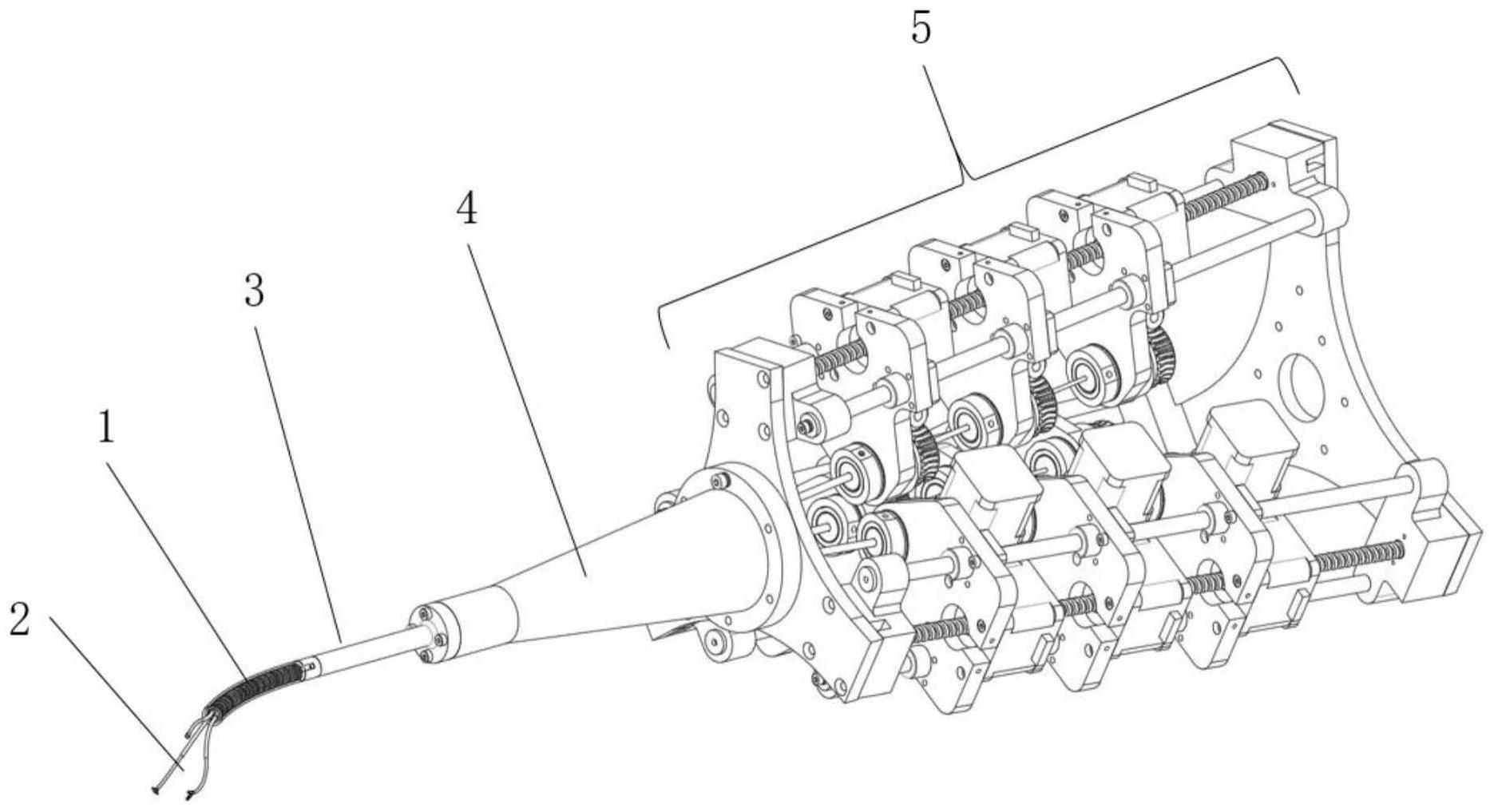
2、为了实现上述目的,本发明提供了一种具有柔性转向鞘的单孔多臂手术机器人,包括柔性转向鞘、柔性臂、刚性直鞘、弯曲单元和驱动单元,其中,所述柔性转向鞘安装于所述刚性直鞘的前端,所述刚性直鞘的后端固定在所述弯曲单元的前端,所述弯曲单元的后端与所述驱动单元相连接,所述驱动单元与所述柔性臂连接,为所述柔性臂提供平移和旋转自由度,所述柔性臂先后穿过所述弯曲单元、刚性直鞘从所述柔性转向鞘的内部伸出,所述驱动单元与所述柔性转向鞘连接,为所述柔性转向鞘提供平移和旋转自由度。
3、作为本发明的进一步改进,所述柔性转向鞘包括预弯曲的高弹性管、限位环和弹性包覆体,所述预弯曲的高弹性管被约束于所述限位环的内部,所述弹性包覆体将所述限位环包覆在其内部。
4、作为本发明的进一步改进,所述预弯曲的高弹性管至少有两根,每一根所述预弯曲的高弹性管的后端与一根高刚性的传动管相固连,所述驱动单元与所述传动管连接,为所述传动管提供平移和旋转自由度。
5、作为本发明的进一步改进,所述预弯曲的高弹性管能够绕中心轴线进行旋转运动,所述限位环将所述预弯曲的高弹性管收束在一起,各个所述预弯曲的高弹性管之间、以及各个所述预弯曲的高弹性管与所述限位环之间具有弹性相互作用,能够使各个所述预弯曲的高弹性管曲率改变,能够使所述柔性转向鞘的弯曲形状产生变化。
6、作为本发明的进一步改进,所述预弯曲的高弹性管的自由状态呈弯曲状。
7、作为本发明的进一步改进,所述限位环至少有两个并且沿所述预弯曲的高弹性管的轴向均匀分布。
8、作为本发明的进一步改进,所述刚性直鞘包括直鞘后段和直鞘前段,所述直鞘后段固定于所述弯曲单元的前端,其将从所述弯曲单元中倾斜穿出的各所述传动管收束进入所述直鞘后段;所述直鞘前段的前端和所述弹性包覆体连接,所述直鞘前段的后端和所述直鞘后段连接,所述预弯曲的高弹性管从所述直鞘前段的内部穿出。
9、作为本发明的进一步改进,所述弯曲单元包括管分离件和塔形连接件,所述管分离件固定于所述塔形连接件后端,所述塔形连接件前端和所述刚性直鞘相连接,其后端固定在所述驱动单元上;各所述传动管倾斜插入所述弯曲单元,所述管分离件将各所述传动管分隔开。
10、作为本发明的进一步改进,所述驱动单元包括前安装板、后安装板和驱动模组,所述前安装板与所述弯曲单元后端连接,所述驱动模组和所述柔性臂一一对应,所述驱动模组倾斜安装于所述前安装板和所述后安装板之间;所述驱动模组包括驱动模组前安装件、驱动模组后安装件、丝杠、光杠和驱动模块,所述驱动模组前安装件与所述驱动单元的前安装板相连接,所述驱动模组后安装件与所述驱动单元的后安装板相连接,所述丝杠和所述光杠的两端分别固定在所述驱动模组前安装件和所述驱动模组后安装件上,所述驱动模块安装在所述丝杠和所述光杠之上,能够为所述传动管提供平移和旋转自由度,每个独立的传动管由一个独立的驱动模块驱动,每个独立的柔性臂由一个独立的驱动模块驱动;所述驱动模块包括移动载板、直线轴承、中空丝杠电机、旋转电机、蜗杆、蜗轮和管连接环,所述直线轴承固定在所述移动载板上,所述直线轴承和所述光杠相配合,所述中空丝杠电机安装在所述移动载板上部,与所述丝杠相配合,所述旋转电机安装在所述移动载板一侧,所述蜗杆与所述旋转电机的输出轴相连接,所述蜗轮安装在所述移动载板下部,其内部为中空,所述蜗杆和蜗轮相互啮合,所述管连接环和所述蜗轮的前端相套接,所述传动管的近端插入所述蜗轮的中空孔内,其与所述蜗轮、管连接环三者相连接。
11、作为本发明的进一步改进,所述柔性臂包括操作臂、视觉臂、手术工具和微型摄像头,所述操作臂从一个预弯曲的高弹性管中伸出,一个独立的操作臂对应一个独立的高弹性管,所述视觉臂从一个预弯曲的高弹性管中伸出,一个独立的视觉臂对应一个独立的高弹性管,所述手术工具安装于所述操作臂末端,所述微型摄像头安装于所述视觉臂末端。
12、本发明的有益效果是:通过上述方案,本发明提出的具有柔性转向鞘的单孔多臂手术机器人,可控制所述柔性转向鞘改变其形状,进而可以适应弯曲的手术入路,解决了传统单孔微创手术机器人刚性外鞘的杠杆效应问题,提升了机器人面对不同手术场景的适应性,同时能够有效增大操作臂的工作空间;所述柔性转向鞘中的每根预弯曲的高弹性管自带一个中空通道,而无需额外再设计工具通道,具有结构简单、方便通过各中空通道安装多个操作臂和手术工具的优点,有利于通过单一小尺寸手术创口传递多臂操作臂。
技术特征:
1.一种具有柔性转向鞘的单孔多臂手术机器人,其特征在于:包括柔性转向鞘、柔性臂、刚性直鞘、弯曲单元和驱动单元,其中,所述柔性转向鞘安装于所述刚性直鞘的前端,所述刚性直鞘的后端固定在所述弯曲单元的前端,所述弯曲单元的后端与所述驱动单元相连接,所述驱动单元与所述柔性臂连接,为所述柔性臂提供平移和旋转自由度,所述柔性臂先后穿过所述弯曲单元、刚性直鞘从所述柔性转向鞘的内部伸出,所述驱动单元与所述柔性转向鞘连接,为所述柔性转向鞘提供平移和旋转自由度。
2.根据权利要求1所述的具有柔性转向鞘的单孔多臂手术机器人,其特征在于:所述柔性转向鞘包括预弯曲的高弹性管、限位环和弹性包覆体,所述预弯曲的高弹性管被约束于所述限位环的内部,所述弹性包覆体将所述限位环包覆在其内部。
3.根据权利要求2所述的具有柔性转向鞘的单孔多臂手术机器人,其特征在于:所述预弯曲的高弹性管至少有两根,每一根所述预弯曲的高弹性管的后端与一根高刚性的传动管相固连,所述驱动单元与所述传动管连接,为所述传动管提供平移和旋转自由度。
4.根据权利要求3所述的具有柔性转向鞘的单孔多臂手术机器人,其特征在于:所述预弯曲的高弹性管能够绕中心轴线进行旋转运动,所述限位环将所述预弯曲的高弹性管收束在一起,各个所述预弯曲的高弹性管之间、以及各个所述预弯曲的高弹性管与所述限位环之间具有弹性相互作用,能够使各个所述预弯曲的高弹性管曲率改变,能够使所述柔性转向鞘的弯曲形状产生变化。
5.根据权利要求3所述的具有柔性转向鞘的单孔多臂手术机器人,其特征在于:所述预弯曲的高弹性管的自由状态呈弯曲状。
6.根据权利要求2所述的具有柔性转向鞘的单孔多臂手术机器人,其特征在于:所述限位环至少有两个并且沿所述预弯曲的高弹性管的轴向均匀分布。
7.根据权利要求3所述的具有柔性转向鞘的单孔多臂手术机器人,其特征在于:所述刚性直鞘包括直鞘后段和直鞘前段,所述直鞘后段固定于所述弯曲单元的前端,其将从所述弯曲单元中倾斜穿出的各所述传动管收束进入所述直鞘后段;所述直鞘前段的前端和所述弹性包覆体连接,所述直鞘前段的后端和所述直鞘后段连接,所述预弯曲的高弹性管从所述直鞘前段的内部穿出。
8.根据权利要求7所述的具有柔性转向鞘的单孔多臂手术机器人,其特征在于:所述弯曲单元包括管分离件和塔形连接件,所述管分离件固定于所述塔形连接件后端,所述塔形连接件前端和所述刚性直鞘相连接,其后端固定在所述驱动单元上;各所述传动管倾斜插入所述弯曲单元,所述管分离件将各所述传动管分隔开。
9.根据权利要求8所述的具有柔性转向鞘的单孔多臂手术机器人,其特征在于:所述驱动单元包括前安装板、后安装板和驱动模组,所述前安装板与所述弯曲单元后端连接,所述驱动模组和所述柔性臂一一对应,所述驱动模组倾斜安装于所述前安装板和所述后安装板之间;所述驱动模组包括驱动模组前安装件、驱动模组后安装件、丝杠、光杠和驱动模块,所述驱动模组前安装件与所述驱动单元的前安装板相连接,所述驱动模组后安装件与所述驱动单元的后安装板相连接,所述丝杠和所述光杠的两端分别固定在所述驱动模组前安装件和所述驱动模组后安装件上,所述驱动模块安装在所述丝杠和所述光杠之上,能够为所述传动管提供平移和旋转自由度,一个独立的传动管由一个独立的驱动模块驱动,一个独立的柔性臂由一个独立的驱动模块驱动;所述驱动模块包括移动载板、直线轴承、中空丝杠电机、旋转电机、蜗杆、蜗轮和管连接环,所述直线轴承固定在所述移动载板上,所述直线轴承和所述光杠相配合,所述中空丝杠电机安装在所述移动载板上部,与所述丝杠相配合,所述旋转电机安装在所述移动载板一侧,所述蜗杆与所述旋转电机的输出轴相连接,所述蜗轮安装在所述移动载板下部,其内部为中空,所述蜗杆和蜗轮相互啮合,所述管连接环和所述蜗轮的前端相套接,所述传动管的近端插入所述蜗轮的中空孔内,其与所述蜗轮、管连接环三者相连接。
10.根据权利要求1所述的具有柔性转向鞘的单孔多臂手术机器人,其特征在于:所述柔性臂包括操作臂、视觉臂、手术工具和微型摄像头,所述操作臂从一个预弯曲的高弹性管中伸出,一个独立的操作臂对应一个独立的高弹性管,所述视觉臂从一个预弯曲的高弹性管中伸出,一个独立的视觉臂对应一个独立的高弹性管,所述手术工具安装于所述操作臂末端,所述微型摄像头安装于所述视觉臂末端。
技术总结
本发明提供了一种具有柔性转向鞘的单孔多臂手术机器人,包括柔性转向鞘、多个柔性臂、刚性直鞘、弯曲单元和驱动单元,所述柔性转向鞘安装于所述刚性直鞘前端,所述多个柔性臂从所述柔性转向鞘的内部伸出,所述刚性直鞘固定在所述弯曲单元前端,所述弯曲单元与所述驱动单元相连接。本发明的有益效果是:本发明提出的具有柔性转向鞘的单孔多臂手术机器人可控制所述柔性转向鞘改变其形状,可适应弯曲的手术入路,增大所述多个操作臂的工作空间;所述柔性转向鞘自带多个工具通道,有利于通过单一小尺寸手术创口传递多个操作臂。
技术研发人员:王焦乐,张弨,宋霜
受保护的技术使用者:哈尔滨工业大学(深圳)(哈尔滨工业大学深圳科技创新研究院)
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!