一种脊柱手术机器人导航定位系统的制作方法
本技术涉及医疗器械,具体而言,涉及一种脊柱手术机器人导航定位系统。
背景技术:
1、脊柱手术是一种常见且复杂的外科手术过程,用于治疗脊柱相关的疾病和损伤。传统的脊柱手术通常需要医生凭借丰富的经验和视觉判断来进行操作,但这种方式存在一定的局限性和风险。近年来,随着机器人技术和计算机辅助手术的发展,脊柱手术机器人逐渐成为一种新兴的技术,为脊柱手术带来了巨大的变革和进步。
2、当前,在引入脊柱手术机器人的情况下,脊柱手术机器人仅参与术前规划,对于术中的这些操作一般都是手动进行的,这种手术方式速度慢,且由于手术经验的差异造成医生的手术水平参差不齐,手术效果可能不及预期。
技术实现思路
1、本技术解决的问题是当前手动手术由于个体不同造成的手术水平参差不齐,手术效果不及预期问题。
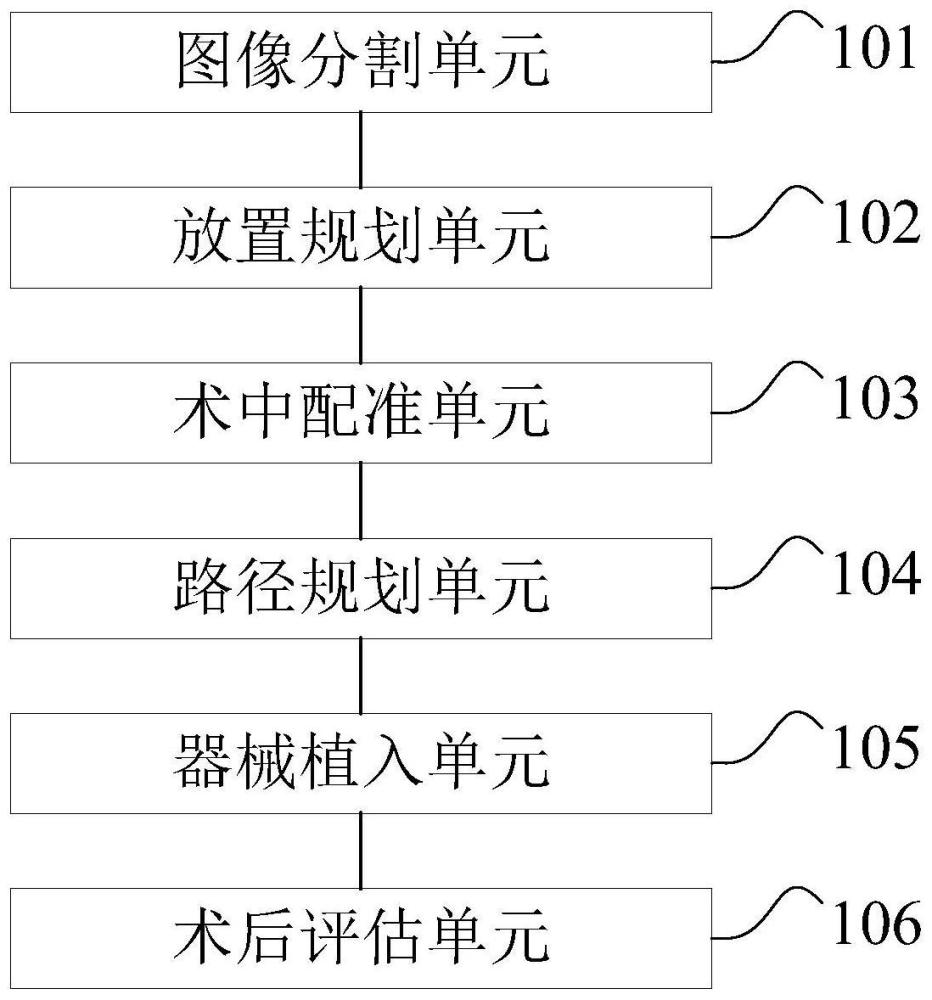
2、为解决上述问题,本技术提供了一种脊柱手术机器人导航定位系统,其包括:
3、图像分割单元,用于对输入的脊柱图像进行处理,识别和分割出脊柱区域;
4、放置规划单元,用于基于强化学习对植入式医疗器械的放置策略进行规划,所述植入式医疗器械包括螺钉、融合器、钛棒和横连中的至少一种;
5、术中配准单元,用于基于深度学习对输入的术中脊柱图像和术前的脊柱图像进行点云配准;
6、路径规划单元,用于根据点云配准结果确定植入式医疗器械的目标位置,并规划机械臂的运动轨迹;
7、器械植入单元,用于根据所述运动轨迹控制所述机械臂执行植入式医疗器械的安装动作;
8、术后评估单元,用于基于术后图像与患者数据对手术结果进行评估。
9、进一步地,所述图像分割单元,在对输入的脊柱图像进行处理,识别和分割出脊柱区域时,具体用于:
10、获取输入的连续ct图像;
11、对输入的所述连续ct图像,进行多次下采样,得到下采样后的特征图;
12、将下采样后的特征图输入transformer模块,得到特征融合后的特征图;
13、对特征融合后的特征图进行多次上采样,得到分割出的脊柱区域,所述上采样次数与所述下采样次数相同,所述脊柱区域中每个脊椎具有不同的标签。
14、进一步地,所述图像分割单元,在对特征融合后的特征图进行多次上采样,得到分割出的脊柱区域时,具体用于:
15、将每次下采样的下采样结果输入多注意力模块,得到多视角的下采样结果;
16、将每次下采样对应的多视角的下采样结果与每次上采样的上采样结果结合,并进行后一次上采样,直至得到所述分割出的脊柱区域。
17、进一步地,所述图像分割单元,在将每次下采样对应的多视角的下采样结果与每次上采样的上采样结果结合,并进行后一次上采样,直至得到所述分割出的脊柱区域时,具体用于:
18、对特征融合后的特征图进行第一次上采样,得到第一上采样结果;
19、将第一上采样结果与多视角的第三下采样结果结合,得到第一融合特征图;
20、对第一融合特征图进行第二次上采样,得到第二上采样结果;
21、将第二上采样结果与多视角的第二下采样结果结合,得到第二融合特征图;
22、对第二融合特征图进行第三次上采样,得到第三上采样结果;
23、将第三上采样结果与多视角的第一下采样结果结合,得到第三融合特征图;
24、对第三融合特征图进行第四次上采样,得到所述分割出的脊柱区域;所述多视角的第一下采样结果、第二下采样结果、第三下采样结果分别为将第一次下采样、第二次下采样、第三次下采样的下采样结果输入对应的多注意力模块得到的。
25、进一步地,所述图像分割单元,在将每次下采样的下采样结果输入多注意力模块,得到多视角的下采样结果时,具体用于:
26、将每次下采样的下采样结果进行冠状位转换,得到冠状位视图;
27、将所述冠状位视图输入transformer模块,得到特征融合后的冠状位重排图;
28、将每次下采样的下采样结果进行矢状位转换,得到矢状位视图;
29、将所述矢状位视图输入transformer模块,得到特征融合后的矢状位重排图;
30、将所述下采样结果、所述冠状位重排图和所述矢状位重排图进行融合,得到所述多视角的下采样结果。
31、进一步地,所述放置规划单元,在基于强化学习对植入式医疗器械的放置策略进行规划时,具体用于:
32、获取待放置植入式医疗器械的放置信息,所述放置信息包括类别、数量及放置位置;
33、基于所述放置信息选取与类别、数量及放置位置对应的放置策略;
34、基于选取的所述放置策略对设定类别、数量及放置位置的所述植入式医疗器械的放置过程进行规划。
35、进一步地,所述放置规划单元,在基于强化学习对植入式医疗器械的放置策略进行规划之前,还用于:
36、获取植入式医疗器械训练数据,所述植入式医疗器械训练数据包括术前的3d脊柱图像、每个螺钉、每个融合器、每个钛棒和每个横连的位置信息和姿态信息、每个植入式医疗器械的放置结果;
37、基于所述植入式医疗器械训练数据建立多智能体强化学习环境,确定智能体的状态空间、动作空间和奖励函数,每个螺钉、每个融合器、每个钛棒、每个横连均为一个智能体;
38、构建每个智能体的放置策略以及智能体之间的协作策略,相同类别且不同个体的智能体的策略网络结构相同;
39、基于所述放置策略和协作策略,对智能体进行训练,得到每个智能体优化后的放置策略。
40、进一步地,所述螺钉的状态空间包括入钉点、直径、长度、横断面倾角和矢状面倾角;所述螺钉的奖励函数由螺钉中心与椎弓根中轴线的偏移、螺钉是否突破椎体前缘、螺钉直径与椎弓根直径的相对关系、螺钉长度与椎体长度的相对关系确定。
41、进一步地,所述融合器的状态空间包括位置、长度、高度、宽度和倾角;所述融合器的奖励函数由添加融合器后脊柱的评测生理曲度以及脊柱的评测融合率确定。
42、进一步地,所述钛棒的状态空间包括位置、直径、长度和弯曲度;所述融合器的奖励函数由钛棒螺钉连接的稳定性确定。
43、进一步地,所述横连的状态空间包括位置和长度;所述融合器的奖励函数由评测结果稳定性、横连的结构刚性评估确定。
44、进一步地,所述术中配准单元,在基于深度学习对输入的术中脊柱图像和术前的脊柱图像进行点云配准时,具体用于:
45、获取术中x光图像,所述x光图像包括冠状位图像和矢状位图像;
46、基于已训练的第一深度学习网络对x光图像进行识别和分割,得到识别后的3d脊柱图像;
47、确定3d脊柱图像中的各个待手术脊椎;
48、基于已训练的第二深度学习网络将术前的3d脊柱图像分别与各个待手术脊椎配准。
49、本技术中,通过图像分割单元对脊柱区域进行识别和分割,通过放置规划单元对植入式医疗器械的放置进行术前规划,通过术中配准单元对术前的3d脊柱图像和术中的x光进行配准,以实现术前-术中的高精度对应,从而在此基础上完成脊柱植入式医疗器械的安装。
50、本技术中,可以基于术前-术中的高精度配准,控制机械臂完成自主植入式医疗器械安装操作,实现脊柱手术机器人在手术过程中的自动化操作,减少人为干预,进而减小由于人为干预所带来的误差,提高了手术的准确性、稳定性以及手术效率。
- 还没有人留言评论。精彩留言会获得点赞!