器械控制装置及器械控制系统的制作方法
本发明属于介入机器人,具体涉及一种器械控制装置及器械控制系统。
背景技术:
1、血管介入技术是一项新兴的心脑血管疾病诊疗手段,医生在医学影像的引导下,通过导管沿血管腔直接到达体内病变部位(如冠状动脉和脑部、肝脏、肾脏等部位的血管),然后利用导管输送诊疗剂或手术器械(如球囊、支架、弹簧圈等),对体内较远的病变实施微创性诊断和治疗。
2、目前,血管微创介入疗法多借助血管介入手术机器人操作,将导丝/导管在病人血管内的进行定位操作,其导丝/导管的夹持部件都是在操作平台上实现推送的。
3、当细长型医疗器械使用数量较多时,因手术消毒车的台面面积有限,细长型医疗器械在操作平台的拆装效率较低,特别是套筒式夹具的拆装,容易出现缠绕甚至打结的情况,延长了手术时间,降低了手术效率;尤其当危重症或复杂介入手术时,可能延误抢救时机而造成无法弥补的后果。
技术实现思路
1、本发明的目的是至少解决现有的介入手术机器人无法实现细长型医疗器械的快速拆装的问题。该目的是通过以下技术方案实现的:
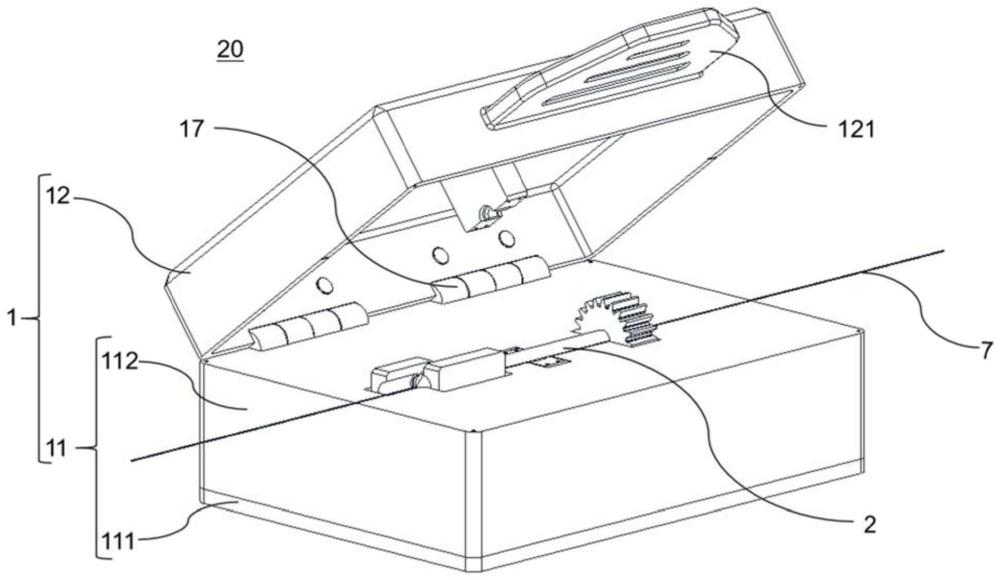
2、本发明的第一方面提出了一种器械控制装置,用于控制细长型医疗器械,所述器械控制装置包括固定组件、动力机构和套筒式夹持件;
3、所述固定组件包括第一固定件,所述第一固定件中空设置形成一封闭空间;所述第一固定件开设有一连通所述封闭空间的开槽,所述开槽与所述套筒式夹持件适配,以放置所述套筒式夹持件;
4、所述动力机构,安装在所述第一固定件的封闭空间内,用于驱动所述套筒式夹持件运动;
5、所述套筒式夹持件放置在所述开槽时,与所述动力机构可拆卸连接,且部分露出于所述第一固定件外。
6、本发明所述的器械控制装置,包括固定组件、动力机构和套筒式夹持件。通过设置具有开槽的第一固定件,以用于套筒式夹持件的放置,且在套筒式夹持件处于放置状态时,其部分露出于第一固定件外,使得套筒式夹持件在固定组件的拆装变得更为简单快捷,由于套筒式夹持件用于夹持细长型医疗器械,进而实现了细长型医疗器械在固定组件上快速拆装,使得在手术中医生放置和更换细长型医疗器械的步骤变得更加简单快捷,有助于减少操作步骤和手术时间。同时,通过设置与套筒式夹持件可拆卸连接的动力机构,保障了细长型医疗器械在使用过程中的运动。此外,将动力机构设置在固定组件的封闭空间中,有利于减少外部环境对动力机构的影响,实现隔离消毒的效果。
7、另外,根据本发明的器械控制装置,还可具有如下附加的技术特征:
8、在本发明的一些实施例中,所述套筒式夹持件包括:
9、主体,所述主体具有供所述细长型医疗器械穿经的容置通道,且所述主体上设置有夹持部,所述夹持部用于夹紧所述细长型医疗器械;所述夹持部包括若干弹性件,相邻弹性件之间形成沿细长型医疗器械轴向方向的狭缝,所述狭缝与所述容置通道连通;
10、盖帽,所述盖帽用于套设在所述夹持部的外侧,且所述盖帽设置有与所述容置通道相连通的通孔;
11、所述盖帽具有套设在所述夹持部上并挤压所述弹性件的第一状态,以及与所述夹持部分离的第二状态,在所述第一状态下,所述夹持部夹紧所述细长型医疗器械;在所述第二状态下,所述细长型医疗器械可移动地设于所述容置通道中。
12、在本发明的一些实施例中,所述固定组件还包括活动装设于所述第一固定件上的第二固定件,所述第一固定件设置有第一固定部,所述第二固定件设置有第二固定部,所述第二固定部用于与所述第一固定部配合夹持所述套筒式夹持件;所述第一固定部和第二固定部通过无油衬套与所述主体的周面连接;
13、所述主体上设置有第一啮合部,所述动力机构包括第一驱动件,所述第一驱动件的输出轴设置有第二啮合部,所述第二啮合部与所述第一啮合部啮合连接;
14、所述第一固定件设置有容置槽,所述容置槽与所述第一啮合部适配,且位于所述第二啮合部上方。
15、在本发明的一些实施例中,所述器械控制装置还包括自动装配组件,所述自动装配组件包括:
16、夹持机构,所述夹持机构用于夹持所述盖帽;
17、装配机构,所述装配机构用于驱使所述夹持机构移动,以使所述盖帽与所述主体保持抵接状态;
18、所述动力机构还用于驱使所述主体转动,以实现所述盖帽于所述第一状态和所述第二状态之间的切换。
19、在本发明的一些实施例中,所述第一固定件还设有与所述开槽连通的第一活动槽和第二活动槽,所述第一活动槽和第二活动槽错位设置且延伸方向垂直于所述细长型医疗器械轴向方向;
20、所述夹持机构包括:
21、安装件,所述安装件可移动地设置在所述第一固定件上;
22、第一挤压件,所述第一挤压件装设于所述安装件上,用于与所述盖帽和主体的部分外周面部分抵接;
23、第二挤压件,所述第二挤压件装设于所述安装件上,用于与所述盖帽的另一部分外周面部分抵接,且所述第二挤压件与所述第一挤压件之间的间距可调;
24、驱动件,所述驱动件装设于所述安装件上,用于驱使所述第一挤压件和/或所述第二挤压件移动,以夹持或松开所述盖帽。
25、在本发明的一些实施例中,所述装配机构包括牵引件,所述牵引件设置在所述第一固定件上,且所述牵引件用于驱使所述安装件移动,以使所述盖帽和所述主体保持抵接状态。
26、在本发明的一些实施例中,所述第一固定部和第二固定部磁吸配合,以使所述第二固定件盖合在所述第一固定件上。
27、在本发明的一些实施例中,所述弹性件设置有检测件,所述检测件与所述细长型医疗器械的周面抵接,所述检测件用于检测若干所述弹性件对所述细长型医疗器械的夹持力;
28、所述第一驱动件用于根据所述夹持力驱使所述主体转动的圈数。
29、本发明的另一方面还提出了一种器械控制系统,包括两个如本发明所述的器械控制装置,还包括第二驱动件、丝杠轴、第一输送件和第二输送件;
30、所述第二驱动件通过联轴器与所述丝杠轴连接;所述丝杠轴包括转向相反的第一丝杆和第二丝杆,所述第一输送件与所述第一丝杆连接,所述第二输送件与所述第二丝杆连接,两个所述器械控制装置分别安装在所述第一输送件和第二输送件上;
31、所述第一输送件和第二输送件沿丝杠轴作同步靠近运动或同步远离运动时,其中一个所述器械控制装置夹持所述细长型医疗器械。
32、在本发明的一些实施例中,还包括控制器;
33、所述控制器用于获取预期位移和/或预期角度,采用模糊pid算法对预期位移和/或预期角度进行处理,得到控制参数;根据所述第二驱动件的计算公式和/或所述动力机构的计算公式建立所述第二驱动件的动力模型和/或所述动力机构的动力模型;基于所述控制参数控制所述第二驱动件的动力模型和/或所述动力机构的动力模型,以得到实际位移和/或实际角度;
34、其中,所述动力机构的计算公式为:
35、
36、其中,t1为所述第一驱动件的驱动力矩,j1为所述第一驱动件的转动惯量,j2为所述第一啮合部的转动惯量,j3为所述无油衬套的转动惯量,j4为所述套筒式夹持件的转动惯量,θ4为所述套筒式夹持件的旋转角度,b2为所述第一驱动件的阻尼系数,δ2为不确定性的扰动干扰;
37、所述套筒式夹持件的旋转角度与所述第一驱动件的旋转角度相同;
38、所述第二驱动件的计算公式为:
39、
40、其中,t2为所述第二驱动件的驱动力矩,k1为所述第二驱动件的转动惯量,k2为所述联轴器的转动惯量,k3为所述丝杠轴的转动惯量,b1为所述第二驱动件的阻尼系数,pb为所述丝杠轴的导程,ms为所述器械控制装置的质量,η1为所述丝杠轴的传递正效率,xs为所述器械控制装置的轴向位移,μv为粘性摩擦系数,μc为库伦摩擦系数,δ1为不确定性的扰动干扰。
- 还没有人留言评论。精彩留言会获得点赞!