一种包含非自主运动补偿的穿刺臂路径规划方法
本发明涉及穿刺机器人,具体涉及一种包含非自主运动补偿的穿刺臂路径规划方法。
背景技术:
1、现有的用于微创消融手术的机器人系统包括超声臂和两套位姿分离机械臂,通过超声臂在体外或体内执行超声手段以看到病灶,使两套位姿分离机械臂前端消融针深入人体并刺入病灶,使电极最大限度地、均匀地进入实体肿瘤组织,然后在消融电极针前端伸展出锚形细电极丝,插入到肿瘤组织中,通过射频输出,使病变区组织细胞离子震荡摩擦产生热量,通过加热的温度来杀灭肿瘤组织病变组织发生凝固性坏死。
2、现有技术中在进行穿刺路径规划,在生理运动补偿时,多是采用局部动态规划的方法,获得动态且局部可用的穿刺路径,而将这种局部动态路径直接用于穿刺使用,脱离了全局规划,具有动态随机性,通常会造成穿刺路径变动巨大,穿刺平稳性得不到保证,因此缺乏对生理运动的有效补偿,导致路径规划效果差。
技术实现思路
1、本发明的目的在于提供一种包含非自主运动补偿的穿刺臂路径规划方法,以解决现有技术中缺乏对生理运动的有效补偿,导致路径规划效果差的技术问题。
2、为解决上述技术问题,本发明具体提供下述技术方案:
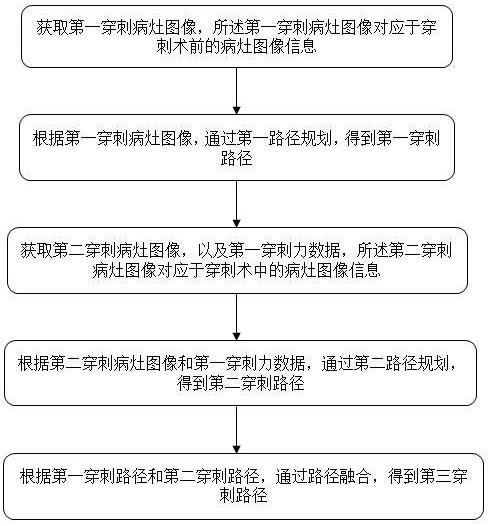
3、一种包含非自主运动补偿的穿刺臂路径规划方法,包括以下步骤:
4、根据第一穿刺病灶图像,对穿刺臂的动作路径进行第一路径规划,得到第一穿刺路径,其中,所述第一路径规划为穿刺术前静态补偿非自住运动的穿刺路径全局性规划;
5、获取第二穿刺病灶图像,以及第一穿刺力数据,所述第二穿刺病灶图像对应于穿刺术中的病灶图像信息,所述第一穿刺力数据对应于穿刺术中穿刺组织对穿刺臂的力反馈属性,其中,穿刺术中的病灶图像信息包含有穿刺对象的非自主运动的实时信息;
6、根据第二穿刺病灶图像和第一穿刺力数据,对穿刺臂的实时动作路径进行第二路径规划,得到第二穿刺路径,其中,所述第二路径规划为穿刺术中实时补偿非自主运动的穿刺路径局部性规划;
7、将所述第一穿刺路径所述和第二穿刺路径进行路径融合,得到第三穿刺路径,其中,所述路径融合为穿刺路径局部性规划与穿刺路径全局性规划的统一,以维持穿刺平稳性;
8、其中,所述病灶图像信息为ct图像信息、超声图像信息、mri图像信息中的至少一种。
9、作为本发明的一种优选方案,所述第一路径规划,包括:
10、在第一穿刺病灶图像中标记出穿刺入体位点和病灶位点;
11、将所述穿刺入体位点和病灶位点分别标定为第一路径起点和第一路径终点;
12、基于第一穿刺病灶图像、第一路径起点和第一路径终点,通过快速扩展随机树算法或改进型快速拓展随机树算法,得到引导穿刺臂由穿刺入体点位行进到病灶位点的所述第一穿刺路径;
13、其中,穿刺入体位点和病灶位点分别为第一穿刺路径的路径起点和路径终点。
14、作为本发明的一种优选方案,所述第二路径规划,包括:
15、对第二穿刺病灶图像,进行非自主运动的实时变动检测,其中,
16、当第二穿刺病灶图像中发生了非自主运动的实时变动,则
17、标记第一穿刺路径中位于第二穿刺病灶图像中局部路径;
18、将所述局部路径中的路径起点和路径节点分别标定为第二路径起点和第二路径终点;
19、根据第二穿刺病灶图像、第二穿刺力数据、第二路径起点和第二路径终点,通过启发式路径规划算法,得到引导穿刺臂由第二路径起点行进至第二路径终点的第二穿刺路径;
20、当第二穿刺病灶图像中未发生非自主运动的实时变动,则将第一穿刺路径中位于第二穿刺病灶图像中的局部路径作为引导穿刺臂由第二路径起点行进至第二路径终点的第二穿刺路径。
21、作为本发明的一种优选方案,所述对第二穿刺病灶图像,进行非自主运动的实时变动检测,包括:
22、分别提取出第二穿刺病灶图像和第一穿刺病灶图像中刚性形变特征;
23、将第二穿刺病灶图像的刚性形变特征和第一穿刺病灶图像的刚性形变特征进行相似性比较,其中,
24、当第二穿刺病灶图像的刚性形变特征和第一穿刺病灶图像的刚性形变特征的相似性低于相似性阈值,则将第二穿刺病灶图像标定为发生了非自主运动的实时变动;
25、当第二穿刺病灶图像的刚性形变特征和第一穿刺病灶图像的刚性形变特征的相似性高于或等于相似性阈值,则将第二穿刺病灶图像标定为未发生非自主运动的实时变动。
26、作为本发明的一种优选方案,所述根据第二穿刺病灶图像、第二穿刺力数据、第二路径起点和第二路径终点,通过启发式路径规划算法,得到所述第二穿刺路径,包括:
27、根据第二穿刺力数据,通过力觉导纳控制策略建立阻抗模型,得到第二穿刺路径的力觉规划模型,所述力觉规划模型的输出项对应于与穿刺组织对穿刺臂的力反馈属性关联的第二穿刺路径,所述力觉规划模型的模型表达式为:;式中,p为对应于第二穿刺力数据的路径节点坐标值,为p的一阶导数,为p的二阶导数,m为惯性系数,fe为第二穿刺力数据,k为刚性系数,b为阻尼系数;根据第二穿刺病灶图像,通过快速扩展随机树算法或改进型快速拓展随机树算法,得到第二穿刺路径的视觉规划模型,所述视觉规划模型的输出项对应于与非自主运动的实时变动关联的第二穿刺路径;
28、将所述视觉规划模型的输出项和所述力觉规划模型的输出项间的均方误差作为第一优化目标,将所述视觉规划模型的输出项与第一穿刺路径中位于第二穿刺病灶图像中局部路径间的均方误差作为第二优化目标;
29、将第二穿刺病灶图像作为求解空间;
30、在求解空间中对第一优化目标和第二优化目标进行最小化求解,得到在力觉和视觉上的局部统一的第二穿刺路径。
31、作为本发明的一种优选方案,所述路径融合,包括:
32、将第二穿刺路径对第一穿刺路径中位于第二穿刺病灶图像中局部路径进行替换,将替换后的第一穿刺路径作为第三穿刺路径。
33、作为本发明的一种优选方案,还包括,通过神经网络对第二穿刺路径进行卷积学习,获得第二穿刺路径的快速规划模型;
34、所述快速规划模型的构建,包括:
35、在第一穿刺病灶图像中截取与第二穿刺病灶图像相对应的局部图像,得到第三穿刺病灶图像;
36、将第三穿刺病灶图像作为第一神经网络的输入项,将第一穿刺路径中位于第二穿刺病灶图像中的局部路径作为第一神经网络的输出项;
37、将第二穿刺病灶图像作为第二神经网络的输入项,将第二穿刺路径作为第二神经网络的输出项;
38、将第一神经网络的输出项和第二神经网络的输出项间的均方误差作为损失函数;
39、基于损失函数对第一神经网络和第二神经网络进行学习训练,得到第二穿刺路径的快速规划模型;
40、所述快速规划模型的模型表达式为:;;
41、式中, loss为损失函数,mse为均方误差运算符,mse( s1, s2)为 s1和 s2的均方误差,s1为第一穿刺路径中位于第二穿刺病灶图像中的局部路径,s2为第二穿刺路径,g2为第二穿刺病灶图像,g3为第三穿刺病灶图像, cnn1为第一神经网络, cnn2为第二神经网络。作为本发明的一种优选方案,所述第二穿刺病灶图像的刚性形变特征和第一穿刺病灶图像的刚性形变特征,由分割-配准的深度学习模型提取得到。
42、作为本发明的一种优选方案,所述第二穿刺力数据、第二穿刺病灶图像和第一穿刺病灶图像通过笛卡尔全局空间坐标系,达到第一穿刺路径和第二穿刺路径全局空间坐标的统一。
43、作为本发明的一种优选方案,所述第一穿刺病灶图像由多组穿刺术前的病灶图像信息进行线性加权得到,所述第二穿刺病灶图像由多组穿刺术中的病灶图像信息进行线性加权得到。
44、本发明与现有技术相比较具有如下有益效果:
45、本发明通过术中的路径规划对术前路径规划进行非自主运动补偿,补偿建立在包含非自主运动的图像信息,以及力反馈属性,达到了视觉和力觉上路径规划统一,保证了补偿兼顾避障和力反馈,而且在补偿非自主运动时,实现了术中的路径规划在术前路径规划基础上保持最小的修正量,保持穿刺平稳性,规避路径更改造成的损伤程度,也能最大程度的继承术前路径规划的优势。
- 还没有人留言评论。精彩留言会获得点赞!