一种主动跟踪式手术导航系统的制作方法
本发明涉及手术机器人领域,尤其涉及到一种主动跟踪式手术导航系统。
背景技术:
1、近年来,手术机器人领域发展迅速。手术机器人是一种整合计算机技术、影像技术和机器人技术的新兴手术方案,能较好地克服传统徒手操作手术精度不足、辐射过多、操作疲劳等问题。手术导航系统一般包括图像工作站、定位系统、手术器械等。从定位系统层面又可分为机械定位、超声定位、电磁定位和光学定位等。
2、在光学信息引导的机器人系统中,摄像机有两种典型的安装方式:
3、(1)眼固定构型(fixedcamera或eye-to-hand)。摄像机安装在机器人的正前方或斜侧方,视场能完全覆盖机器人的工作空间。
4、(2)眼在手上构型(eye-in-hand)。摄像机安装在机器人的末端执行器上,随机器人末端的运动而运动,扩大了摄像机的工作范围。
5、手术机器人系统通常采用眼固定构型安装摄像头,可同时获得机器人及工作环境的全局视觉信息。
6、对光学信息引导的手术机器人,靶点定位的精度主要依赖于术前手眼标定的精度。通过手眼标定可以得到机器人和光学定位系统之间的位置和方向关系。这需要准确计算机器人基座与光学定位系统间、机器人末端与手术器械间的空间关系。
7、现有的手术机器人存在以下缺点:
8、(1)手眼标定首先需要控制机器人在光学定位系统的视场范围内运动,采集后续标定计算所需数据,耗时长。
9、(2)由于采集数据耗时长,为使所采集数据正确,需要保证在整个采集的过程中环境不受干扰,因而对环境要求较为苛刻,容错率低。
10、(3)手眼标定需要做一系列复杂的矩阵运算,验证标定结果的过程也较为复杂,且可能引入机器人运动误差。
11、(4)标定完成后,如果光学定位系统位置发生改变,其与机器人之间的相对位置关系也将改变,计算目标位姿时会出现不可预测的错误,导致定位失败。
12、(5)手术场景中存在的诸多仪器设备与医务人员使得上述情况发生的概率增大,重复计算和更新标定结果将引入新的机器人运动误差并降低机器人运动跟随与靶区定位的实时性。
13、(6)标定完成后,控制机器人运动需要进行一系列的坐标系转换,运算量大,难以对运动目标进行实时跟踪。
14、为了解决上述问题,申请号为202210329570.x的专利申请文件公开了一种基于手术机器人系统的无标定靶区定位跟踪方法,包括以下步骤:s1:由两个标记球构建模拟穿刺路径;s2:构建图像雅可比矩阵;s3:由容积卡尔曼滤波器滤波得到下一时刻的机械臂控制量估计值;s4:目标关节角度通过pid算法转换为机械臂关节速度域控制量;s5:重复s3~s4,直至滤波误差小于预设阈值,此时滤波停止,目标定位完成。
15、上述方案采用无标定视觉伺服的技术路线,术前无需进行手眼标定操作,既能大幅节省术前准备时间,同时也能避免因“手眼”位置改变导致标定好的系统坐标系转换关系失效,增强手术机器人系统的抗干扰性,提升系统整体效率。
16、但是,在传统的手术导航系统中,常常因为医生的站位,设备的摆放以及患者的移动,导致光学跟踪系统的光路被遮挡,或者目标对象,如患者等在光学跟踪系统的视野以外,造成光学跟踪系统跟踪失败。
17、因此,我们有必要对这样一种结构进行改善,以克服上述缺陷。
技术实现思路
1、本发明的目的是提供一种主动跟踪式手术导航系统,在光学跟踪系统上安装主动执行机构,该执行机构可根据目标对象相对光学跟踪系统的实时位置,自动调整光学跟踪系统的位姿,使得目标对象始终处于光学跟踪系统的可视范围内,从而更好地帮助医生开展手术。
2、本发明的上述技术目的是通过以下技术方案实现的:
3、一种主动跟踪式手术导航系统,包括主动跟踪系统、以及设置在主动跟踪系统上的光学定位系统;
4、所述光学定位系统包括双目摄像机,其用于实时获取跟踪对象在光学定位系统中的位姿坐标;
5、所述光学定位系统刚性固定在主动跟踪系统上,其通过标定方法得到光学定位系统与主动跟踪系统的坐标系相对位置关系,并通过主动跟踪系统自动控制光学定位系统沿着光学定位系统的x轴、y轴和z轴运动。
6、进一步的,所述标定方法包括如下步骤:
7、1)将光学定位系统固定在主动跟踪系统上,并将跟踪对象设置在光学定位系统中;
8、2)在主动跟踪系统的可运动范围内,运动预设的8个位姿,并同时记录下这8个位姿下跟踪对象在光学定位系统中的位姿坐标,以及主动跟踪系统的运动姿态;
9、3)根据跟踪对象的位姿坐标和主动跟踪系统的运动姿态,标定光学定位系统与主动跟踪系统的关联关系。
10、进一步的,所述光学定位系统与主动跟踪系统的关联关系的标定方法如下:
11、3.1)将主动追踪系统围绕一个固定点多次旋转变换姿态,并每次旋转记录变换矩阵
12、3.2)记录光学定位系统的安装位置以及主动跟踪系统在各位姿状态下的关节角信息;
13、3.3)根据主动跟踪系统正运动学建立相互关系式:假定基坐标b与机器人的末端坐标系e之间的变换矩阵为工具坐标系与末端坐标系的变换矩阵为工具与机器人的末端法兰面的位置关系固定不变,其标定过程是标定工具所在坐标系t与机器人的末端坐标系e的关系;
14、3.4)使用最小二乘法计算出值,获得光学定位系统与主动跟踪系统的关联关系。
15、进一步的,所述主动跟踪系统的控制策略如下:
16、当目标对象在光学定位系统安全区域内时,主动跟踪系统不移动;
17、当目标对象在光学定位系统可跟踪区域内,但在安全区域以外时,主动跟踪系统根据相对位置姿态,计算调节角度,并控制光学定位系统运动,
18、当目标对象因为光路被遮挡而不可见时,根据实际情况执行策略。
19、进一步的,当目标对象参考架不可见,主动跟踪系统的机械臂姿态偏转较大或者关节位置处于边界时,则执行以下运动控制测策略:
20、首先,基于远程操控方式对机械臂进行复位运动,恢复机械臂正常的关节角度;若此时目标对象参考架可见,则保持当前姿态;若参考架不可见,则启动以下自主运动控制策略:
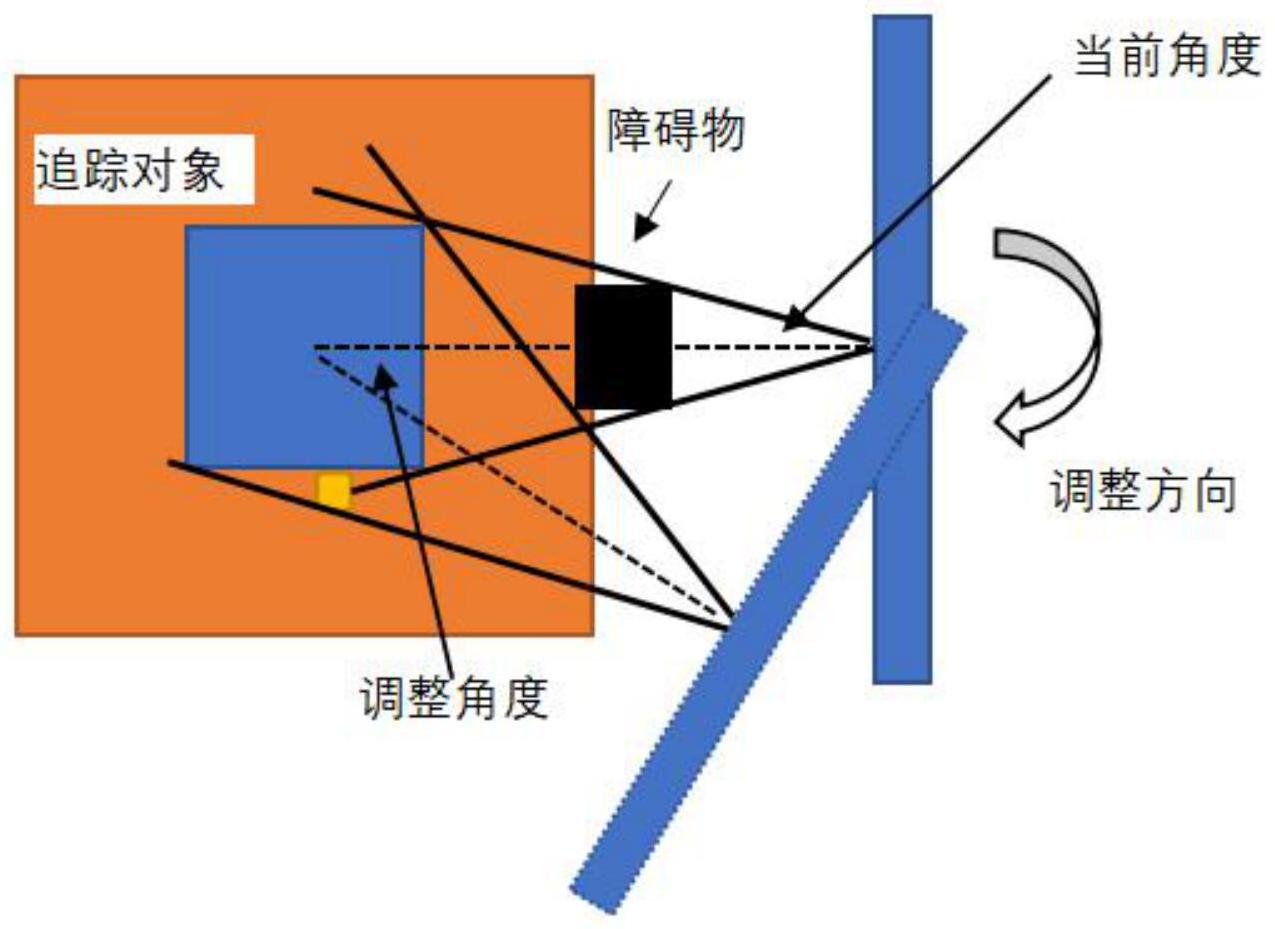
21、基于前景检测算法对参考架前景进行检测,计算当前机械臂位姿,计算当前视野角度;远程控制机械臂顺时针进行运动,过程中基于生成式跟踪搜索新的图像帧中与目标参考架外观模型最相似的区域,若旋转角度大于调整角度且目标对象参考架完全匹配可见,则结束自主运动控制。
22、进一步的,当目标对象参考架不可见,机械臂处于比较好的关节姿态时,则执行以下运动控制测策略:
23、基于前景检测算法对参考架前景进行检测,计算当前机械臂位姿,计算当前视野角度;远程控制机械臂顺时针进行运动,过程中基于生成式跟踪搜索新的图像帧中与目标参考架外观模型最相似的区域,若旋转角度大于调整角度且目标对象参考架完全匹配可见,则结束自主运动控制。
24、进一步的,当目标对象参考架可见,主动跟踪系统的机械臂已经处于姿态偏转较大或者关节位置处于边界时,则执行以下运动控制测策略:
25、首先提示机械臂处于比较糟糕状态,询问是否继续使用;若是,则继续使用,否则进入机械臂操控模式;可自动或手动基于远程操控方式对机械臂进行微调运动,保证运动过程中目标对象参考架可见。
26、综上所述,本发明具有以下有益效果:
27、在目标对象可能离开光学定位系统可视范围时,本发明会自动调整光学定位系统位姿,确保目标对象处于可视范围内。
28、在光学定位系统的光路发生遮挡时,本发明会通过弹窗、灯光或者警报的方式提示用户进行人为干预,以最快的方式恢复系统工作状态。
- 还没有人留言评论。精彩留言会获得点赞!