一种用于脑卒中的智能理疗装置
本发明涉及智能理疗,尤其涉及一种用于脑卒中的智能理疗装置。
背景技术:
1、脑卒中是一种急性脑血管疾病,脑卒中偏瘫是因脑内缺氧性闭塞引起的脑内血液循环受阻引发的肢体活动障碍疾病,恢复困难且恢复期长,严重影响了患者的运动能力和生活质量,虽然随着现代医学的进步和诊疗水平的提高逐渐减少了脑卒中患者的死亡率,但病发后引起的患者偏瘫现象在临床上依旧常见,因此,积极对患者进行康复理疗及护理至关重要,通过带动患者肢体进行被动关节活动训练能够维持关节活动度,预防关键僵硬及肌肉萎缩,促进血液循环,在一定程度上减少恢复周期。
2、中国专利公开号:cn109009916a,公开了一种适用于脑卒中患者的康复理疗床;其技术点是通过设置的多组按摩装置,实现对脑卒中患者进行全身性的按摩;由此可见,在现有的脑卒中理疗装置中均为以主动按摩为主的理论活动,但脑卒中患者肢体往往缺少知觉,对于主动按摩的按摩程度并不能带来主观的疼痛或不适反馈,这也导致了大多数脑卒中患者的肢体在康复训练中受到不同程度的损伤,延迟了康复恢复周期。
技术实现思路
1、为此,本发明提供一种用于脑卒中的智能理疗装置,用以克服现有技术中脑卒中患者肢体训练中缺少智能监控的辅助装置,导致出现康复训练损伤的问题。
2、为实现上述目的,本发明提供一种用于脑卒中的智能理疗装置,包括,
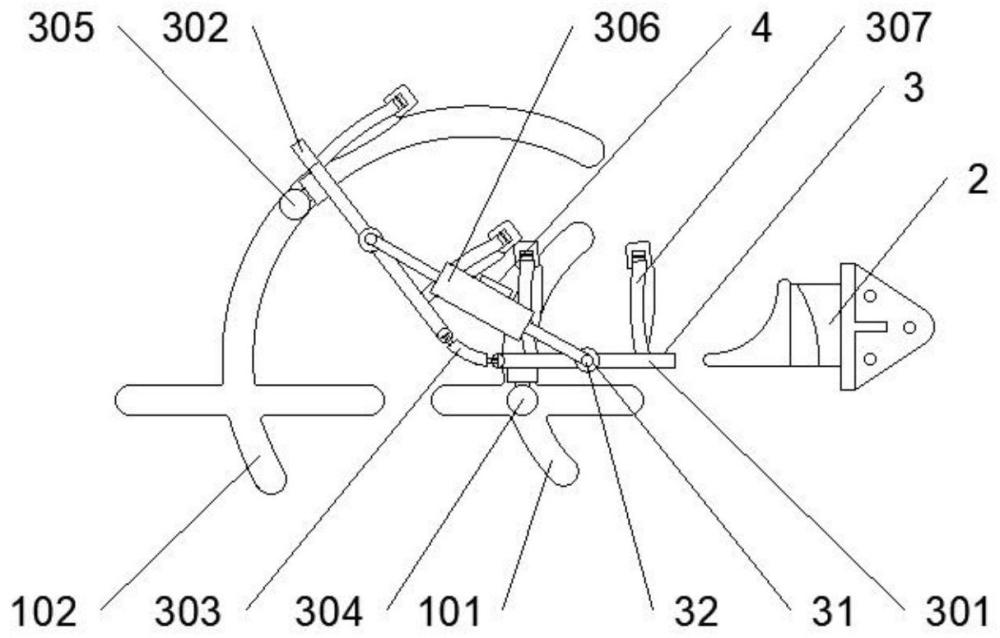
3、理疗床,其用以承载待理疗患者,所述理疗床内设置有第一滑槽与第二滑槽,且在理疗床的顶面设置有与所述第一滑槽和所述第二滑槽位置对应的开口;
4、定位护肩,其固定在所述理疗床顶面,用以对待理疗患者肩部进行定位包裹;
5、活动支架,其用以带动患者肢体移动,所述活动支架包括第一活动板、第二活动板以及用以连接所述第一活动板与所述第二活动板的橡胶套,第一活动板下部设置有第一伸缩杆,第二活动板下部设置有第二伸缩杆,第一活动板与第二活动板的顶侧分别与第三伸缩杆的两端相连;
6、监测器,其与所述第一伸缩杆、所述第二伸缩杆以及所述第三伸缩杆分别相连,用以监测各伸缩杆的伸缩长度数据;
7、电子水平仪,其设置在所述第三伸缩杆一侧,用以监测第三伸缩杆相对于水平方向的实时倾角;
8、应力传感器,其设置在所述橡胶套内部,用以检测橡胶套受到的实时应力,
9、控制器,其与所述活动支架、所述监测器、所述电子水平仪以及所述应力传感器分别相连,所述控制器能够根据所述监测器监测的第三伸缩杆的实时第三长度,确定所述活动支架的状态,并在活动支架中所述第一活动板与所述第二活动板之间未出现弯折时,根据所述第一伸缩杆的实时第一长度对所述第二伸缩杆的伸出长度进行锁定,控制还能在第一活动板与第二活动板之间未出现弯折且第一伸缩杆与第二伸缩杆的伸出长度差小于等于零时,根据第三伸缩杆的实时第三长度与电子水平仪监测的实时倾角,确定对所述第二伸缩杆的伸出长度的锁定。
10、进一步地,所述第一活动板一侧设置若干柔性固定带,所述柔性固定带用以固定患者肢体,第一活动板另一侧设置有第一凸扣,所述第一凸扣的一侧设置在第一活动板侧面的重心位置,且第一活动板能够以第一凸扣为中心做平面旋转,第一凸扣的另一侧设置有第一连接块,所述第一连接块用以连接所述第一伸缩杆。
11、进一步地,所述第一连接块为圆柱体,所述圆柱体内部设置有球形空腔,所述球形空腔与圆柱体侧表面相交,且在圆柱体侧表面形成圆形开口,所述圆形开口直径小于球形空腔直径,所述圆柱体由两块半圆柱体拼接得到,且两块半圆柱体平分所述球形空腔。
12、进一步地,所述第一伸缩杆顶部设置有球头,所述球头能够卡合至所述第一连接块的球形空腔内,第一伸缩杆底部设置有卡块,所述卡块能够将第一伸缩杆卡合在所述理疗床内的所述第一滑槽内,使所述第一伸缩杆能够沿第一滑槽的方向移动。
13、进一步地,所述第二活动板一侧设置若干柔性固定带,第二活动板另一侧设置有第二凸扣,所述第二凸扣上设置有第二连接块,所述第二连接块与所述第一连接块设置相同;所述第二伸缩杆与所述第一伸缩杆设置相同,第二伸缩杆顶部通过球头与第二连接块相连,底部通过卡块与所述第二滑槽卡合。
14、进一步地,所述第一活动板与所述第二活动板的顶面中心分别设置有第三凸扣与第四凸扣,所述第三凸扣上设置有第三连接块,所述第四凸扣上设置有第四连接块,所述第三连接块和所述第四连接块均与所述第一连接块设置相同;所述第三伸缩杆两端均设置有球头,且分别与第三连接块和第四连接块相连。
15、进一步地,所述控制器能够获取所述第三伸缩杆的实时第三长度,并在所述第三伸缩杆的实时第三长度大于标准活动长度时判定所述第一活动板与所述第二活动板之间未出现弯折,根据所述第一伸缩杆的实时第一长度对所述第二伸缩杆的伸出长度进行锁定;
16、其中,l2d=[l1×(lc+l3)]/lc,l2d为所述第二伸缩杆锁定的伸出长度,l1为所述第一伸缩杆的实时第一长度,l3为所述第三伸缩杆的实时第三长度,lc为所述定位护肩与所述第一伸缩杆在初始状态下水平投影的相对距离。
17、进一步地,所述控制器在所述第三伸缩杆的实时第三长度小于等于标准活动长度时,判定所述第一活动板与所述第二活动板之间出现弯折,并计算伸出长度差;
18、若所述第一伸缩杆与所述第二伸缩杆的伸出长度差小于等于零时,所述控制器判定所述第一活动板与所述第二活动板出现反向运动,控制器根据所述第三伸缩杆的实时第三长度与所述电子水平仪监测的实时倾角,确定对所述第二伸缩杆的伸出长度的锁定;
19、其中,le=l2-l1,le为伸出长度差,l2为实时所述第二伸缩杆的实时第二长度,l1为实时所述第一伸缩杆的实时第一长度。
20、进一步地,所述控制器内设置有反向运动角度系数,在所述控制器判定所述第一活动板与所述第二活动板出现反向运动时,控制器将根据所述第三伸缩杆的实时第三长度与反向运动角度系数计算当前最大倾角,并实时锁定所述第二伸缩杆的伸出长度,使所述电子水平仪监测的实时倾角不超过计算的当前最大倾角;
21、其中,cr=(lm-l3)×fc,fc=ch/(lm-ln),cr为计算的当前最大倾角,l3为所述第三伸缩杆的实时第三长度,fc为反向运动角度系数,ch为反向运动最大角度,lm为所述第三伸缩杆可伸长到的最大长度,ln为所述第三伸缩杆可收缩到的最小长度。
22、进一步地,所述控制器一侧设置有报警器,控制器在所述第一伸缩杆与所述第二伸缩杆的伸出长度差大于零时,所述控制器判定所述第一活动板与所述第二活动板为正向运动,控制器将根据内部设定的标准最大应力对所述应力传感器检测的实时应力进行判定,
23、若实时应力大于标准最大应力,所述控制器判定当前为未正常运动,将控制所述报警器进行报警,并锁定所述第一伸缩杆、所述第二伸缩杆以及所述第三伸缩杆的当前状态。
24、与现有技术相比,本发明的有益效果在于,通过在理疗床上设置各滑槽,保障了第一活动板与第二活动板能够在三根伸缩杆的带动下进行多角度的移动,增加了康复训练的动作幅度,同时通过设置监测器监测各伸缩杆的伸缩长度数据,设置电子水平仪监测第三伸缩杆的实时倾角,设置应力传感器检测橡胶套内的实时应力,准确的判定康复训练中肢体的运动状态,并通过设置控制器对各伸缩杆进行锁定,保障了各伸缩杆在不同程度下的限位,使智能理疗装置可以在人为移动肢体时进行限位保护,同时通过设置的控制器控制各伸缩杆的伸缩,也能够在控制器内输入驱动程序进行被动理疗,结合控制器内的限位判定方式,有效地避免肢体训练中由于动作的幅度或是力度造成的训练损伤。
25、进一步地,通过在第一活动板与第二活动板的侧面设置凸扣,并在凸扣上对应设置连接块,以配合对应的伸缩杆上的球头连接,采用球头连接的方式能够有效地提高第一活动板与第二活动板的运动自由度,同时能够准确地配合各伸缩杆的伸缩运动,保障了智能理疗装置的正常理疗功能。
26、进一步地,通过设置第三伸缩杆将第一活动板与第二活动板的顶面相连,可准确的确定待理疗肢体的运动状态,同时通过设置的第三伸缩杆能够对第一活动板与第二活动板的自由度进行一定的限制,进一步提高了智能理疗装置的安全性。
27、尤其,在第三伸缩杆的实时第三长度大于标准活动长度时判定所述第一活动板与所述第二活动板之间未出现弯折,此时表面当前固定的肢体自身未出现弯折状态,故控制器根据第一伸缩杆的实时第一长度对第二伸缩杆的伸出长度进行实时锁定,使该状态下,待理疗肢体仅能够以肩部为轴进行理疗运动,减小肢体训练中出现损伤的情况,提高了智力理疗装置的安全性。
28、进一步地,在控制器判定第一活动板与第二活动板出现反向运动时,即第一伸缩杆伸出的长度高于第二伸缩杆伸出的长度,此时待理疗肢体小臂以手肘为轴向内侧运动,此时更容易出现手肘损伤,而此时小臂向内侧可运动的程度与手臂的弯曲程度成相对的正相关,因此根据第三伸缩杆的实时第三长度判定手臂的弯曲程度,对应的以实时倾角控制第二伸缩杆的伸出长度,避免出现理疗训练中的手肘损伤,提高了智力理疗装置的安全性。
- 还没有人留言评论。精彩留言会获得点赞!