超声探头的归零控制方法、系统和存储介质与流程
本申请涉及超声探头,特别是涉及超声探头的归零控制方法、系统和存储介质。
背景技术:
1、目前超声三维成像模式使用的探头通常为机械容积探头,在三维模式扫查时探头的换能器会在内部电机的带动下进行往返摆动,在非三维模式下换能器需要静止在归零位置。探头的归零控制即为令探头的换能器位置停止在归零位置。因目前机械容积探头的结构限制,在进行探头归零控制时,无论换能器转动角度是处于归零位置左侧,或是归零位置右侧,传感器输出的信号状态往往都是高电平。因此,相关技术中无法直接基于传感器的信号状态确定换能器的归零方向,而需要反复尝试调整换能器的转动角度,结合传感器的信号状态的变化,确定归零方向,再基于确定的归零方向控制换能器归零。另外由于系统传递延时和系统响应延时,换能器也无法准确停止在预设的归零位置。因而,相关技术中在进行归零控制时,往往需要耗费较长时间,且无法准确地控制换能器回归至预设的归零位置。
2、针对相关技术中存在换能器归零效率较低,且准确度较低的问题,目前还没有提出有效的解决方案。
技术实现思路
1、在本实施例中提供了一种超声探头的归零控制方法、系统和存储介质,以解决相关技术中换能器归零效率较低,且准确度较低的问题。
2、第一个方面,在本实施例中提供了一种超声探头的归零控制方法,所述超声探头上设置有传感器和遮挡件,所述遮挡件与所述超声探头的换能器同步转动,所述传感器固定设置于所述换能器的预设归零位置;所述方法包括:
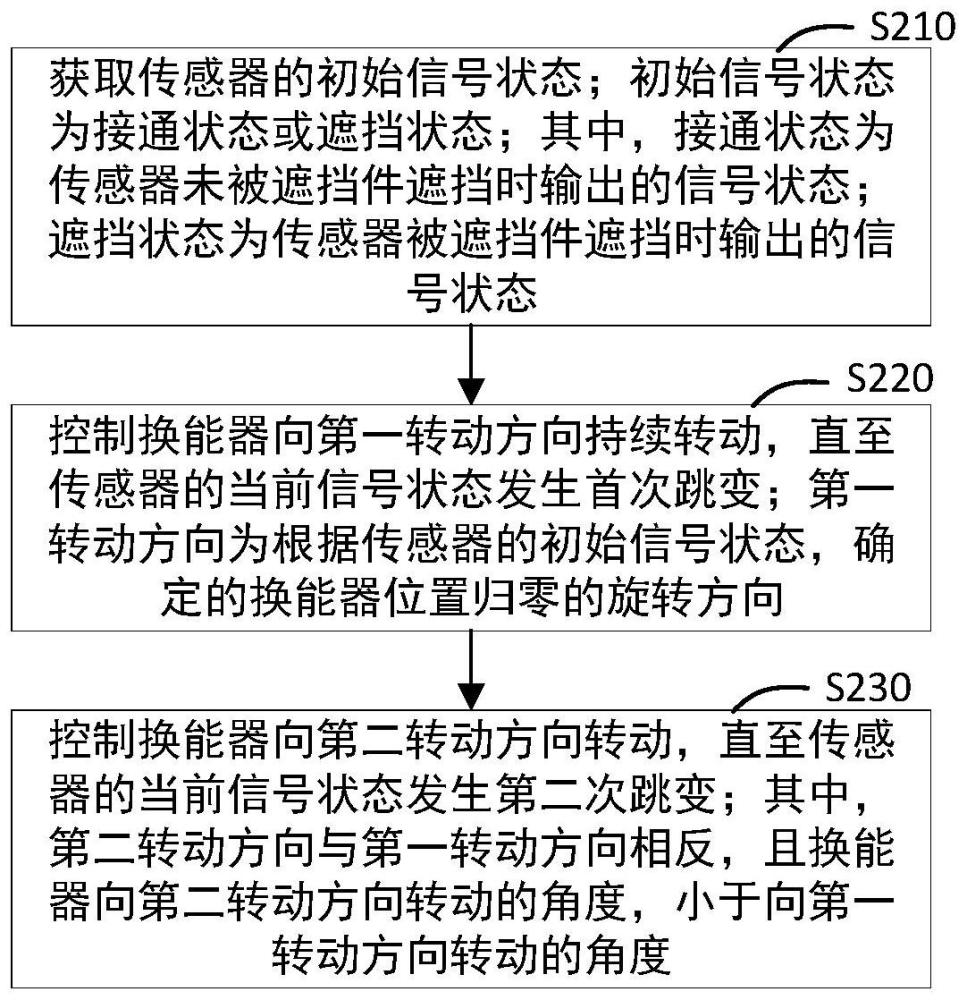
3、获取所述传感器的初始信号状态;所述初始信号状态为接通状态或遮挡状态;其中,所述接通状态为所述传感器未被所述遮挡件遮挡时输出的信号状态;所述遮挡状态为所述传感器被所述遮挡件遮挡时输出的信号状态;
4、控制所述换能器向第一转动方向持续转动,直至所述传感器的当前信号状态发生首次跳变;所述第一转动方向为根据所述传感器的初始信号状态,确定的所述换能器位置归零的旋转方向;
5、控制所述换能器向第二转动方向转动,直至所述传感器的当前信号状态发生第二次跳变;其中,所述第二转动方向与所述第一转动方向相反,且所述换能器向所述第二转动方向转动的角度,小于向所述第一转动方向转动的角度。
6、在其中的一些实施例中,在所述初始信号状态为接通状态时,所述换能器的第一转动方向为使所述传感器的信号状态跳变为遮挡状态的方向。
7、在其中的一些实施例中,所述方法还包括:
8、在所述传感器的当前信号状态发生第二次跳变后,控制所述换能器向第三转动方向转动,直至所述传感器的当前信号状态发生第三次跳变;所述第三转动方向与所述第二转动方向相反。
9、在其中的一些实施例中,所述方法还包括:
10、当所述初始信号状态为接通状态和遮挡状态的其中一种状态时,在所述传感器的当前信号状态发生第二次跳变后,控制所述换能器向第三转动方向转动,直至所述传感器的当前信号状态发生第三次跳变;所述第三转动方向与所述第二转动方向相反;
11、当所述初始信号状态为接通状态和遮挡状态的其中另一种状态时,在所述传感器的当前信号状态发生第二次跳变后,控制所述换能器停止转动。
12、在其中的一些实施例中,在所述初始信号状态为遮挡状态时,所述换能器的第一转动方向为使所述传感器的信号状态跳变为接通状态的方向。
13、在其中的一些实施例中,所述控制所述换能器向第二转动方向转动,直至所述传感器的当前信号状态发生第二次跳变,包括:
14、控制所述换能器以预设步进角度向第二转动方向步进转动,直至所述传感器的当前信号状态发生第二次跳变。
15、在其中的一些实施例中,所述控制所述换能器以预设步进角度向第二转动方向步进转动,直至所述传感器的当前信号状态发生第二次跳变,包括:
16、每当控制所述换能器以预设步进角度向所述第二转动方向转动一次之后,判断所述传感器的当前信号状态是否发生第二次跳变,若是,则控制所述换能器停止步进转动;否则,控制所述换能器继续向所述第二转动方向转动一次。
17、在其中的一些实施例中,所述控制所述换能器向第一转动方向持续转动,直至所述传感器的当前信号状态发生首次跳变,包括:
18、在所述换能器的极限旋转角度之内,控制所述换能器向第一转动方向持续转动,直至所述传感器的当前信号状态发生首次跳变。
19、第二个方面,在本实施例中提供了一种超声探头的归零控制系统,包括:超声探头和控制器;其中,所述超声探头上设置有遮挡件和传感器,所述遮挡件与所述超声探头的换能器同步转动,所述传感器固定设置于所述换能器的预设归零位置;
20、所述超声探头用于对检测对象进行超声三维成像;
21、所述控制器用于执行上述第一个方面所述的超声探头的归零控制方法。
22、第三个方面,在本实施例中提供了一种存储介质,其上存储有计算机程序,该程序被处理器执行时实现上述第一个方面所述的超声探头的归零控制方法。
23、与相关技术相比,在本实施例中提供了超声探头的归零控制方法、系统和存储介质,其中的超声探头的归零控制方法,首先获取传感器的初始信号状态;初始信号状态为接通状态或遮挡状态;其中,接通状态为传感器未被遮挡件遮挡时输出的信号状态;遮挡状态为传感器被遮挡件遮挡时输出的信号状态;再控制换能器向第一转动方向持续转动,直至传感器的当前信号状态发生首次跳变;第一转动方向为根据传感器的初始信号状态,确定的换能器位置归零的旋转方向;最后控制换能器向第二转动方向转动,直至传感器的当前信号状态发生第二次跳变;其中,第二转动方向与第一转动方向相反,且换能器向第二转动方向转动的角度,小于向第一转动方向转动的角度。其能够基于传感器的信号状态实现对换能器所处位置的判断,从而实现对换能器转动的准确控制,且通过检测两次信号跳变令换能器准确处于预设的归零位置,从而提高换能器归零控制的效率和准确度。
24、本申请的一个或多个实施例的细节在以下附图和描述中提出,以使本申请的其他特征、目的和优点更加简明易懂。
技术特征:
1.一种超声探头的归零控制方法,其特征在于,所述超声探头上设置有传感器和遮挡件,所述遮挡件与所述超声探头的换能器同步转动,所述传感器固定设置于所述换能器的预设归零位置;所述方法包括:
2.根据权利要求1所述的超声探头的归零控制方法,其特征在于:
3.根据权利要求1所述的超声探头的归零控制方法,其特征在于,所述方法还包括:
4.根据权利要求1所述的超声探头的归零控制方法,其特征在于,所述方法还包括:
5.根据权利要求1所述的超声探头的归零控制方法,其特征在于:
6.根据权利要求1所述的超声探头的归零控制方法,其特征在于,所述控制所述换能器向第二转动方向转动,直至所述传感器的当前信号状态发生第二次跳变,包括:
7.根据权利要求6所述的超声探头的归零控制方法,其特征在于,所述控制所述换能器以预设步进角度向第二转动方向步进转动,直至所述传感器的当前信号状态发生第二次跳变,包括:
8.根据权利要求1至7中任一项所述的超声探头的归零控制方法,其特征在于,所述控制所述换能器向第一转动方向持续转动,直至所述传感器的当前信号状态发生首次跳变,包括:
9.一种超声探头的归零控制系统,其特征在于,包括:超声探头和控制器;其中,所述超声探头上设置有遮挡件和传感器,所述遮挡件与所述超声探头的换能器同步转动,所述传感器固定设置于所述换能器的预设归零位置;
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至8中任一项所述的超声探头的归零控制方法的步骤。
技术总结
本申请涉及一种超声探头的归零控制方法、系统和存储介质,其中的超声探头的归零控制方法,首先获取传感器的初始信号状态;初始信号状态为接通状态或遮挡状态;再控制换能器向第一转动方向持续转动,直至传感器的当前信号状态发生首次跳变;最后控制换能器向第二转动方向转动,直至传感器的当前信号状态发生第二次跳变;其中,第二转动方向与第一转动方向相反,且换能器向第二转动方向转动的角度,小于向第一转动方向转动的角度。其能够基于传感器的信号状态实现对换能器所处位置的判断,从而实现对换能器转动的准确控制,且通过检测两次信号跳变令换能器准确处于预设的归零位置,从而提高换能器归零控制的效率和准确度。
技术研发人员:杨作为
受保护的技术使用者:武汉联影医疗科技有限公司
技术研发日:
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!