一种主被动平衡训练模块及动态平衡训练系统的制作方法
1.本实用新型涉及康复器械技术领域,特别是涉及一种主被动平衡训练模块及动态平衡训练系统。
背景技术:
2.平衡控制是一种复杂的运动,人行走和站立、以及各种动作都依赖于正确的平衡能力才能顺利完成。人体姿势平衡的维持是个复杂的过程,依赖于中枢系统对视觉、本体感觉和前庭觉信息的协调和对运动效应器的控制,几者缺一不可,相辅相成。视觉系统提供周围环境信息、身体运动和运动方向等信息,尤其是在本体感觉受到破坏时,视觉系统发挥重要作用。位于关节、肌腱和肌肉部位的本体感受器,传递与身体即时姿势有关的状态信息。而前庭觉则是传递维持平衡、以及机体与周围环境相关的信息,如传递加速度和头部在空间的位置等信息,再由前庭运动系统调节眼位保持清晰的视觉,调节有关骨骼肌张力,保持头位及正确姿势。
3.据统计,我国脑血管病、帕金森病、颅脑外伤、脊髓损伤年发病率逐年增加。这些疾病和损伤会造成平衡功能障碍乃至残疾。而平衡功能障碍是主要致残因素。多个循证医学证据表明,包括平衡功能及下肢功能在内的训练是改善功能的重要方式。
4.现有的平衡训练产品主要针对站姿训练,分为被动适应型和主动适应型两类产品,被动适应型产品自带动力系统,通过电力驱动踏板的轻微摆动带动训练者进行适应性训练,在训练者平衡感较差或力量不足时容易受到损伤,主动适应型产品自身不带驱动,是通过训练者自身调整重心来促使踏板向训练计划的方向倾斜,目前动态平衡训练产品踏板支撑结构不够合理,容易导致踏板摆动时阻尼过小或过大,当踏板的摆动阻尼较小时,导致训练者训练时因不适应而受到损伤,当踏板的摆动阻尼较大时,因体力原因难以持续训练。
技术实现要素:
5.本实用新型的目的是提供一种主被动平衡训练模块及动态平衡训练系统,以解决上述现有技术存在的问题,满足多功能训练需求,实现主被动训练,减轻治疗师的工作压力。
6.为实现上述目的,本实用新型提供了如下方案:
7.本实用新型提供了一种主被动平衡训练模块,包括旋转板,x轴驱动结构和y轴驱动结构,所述x轴驱动结构和所述y轴驱动结构通过传动结构传动连接,所述旋转板设置在所述x轴驱动结构上,所述旋转板上设置有x向传感器。
8.优选的,所述传动结构包括相互啮合的蜗杆和蜗轮,所述蜗杆与所述 y轴驱动结构的动力输出端连接,所述蜗轮与所述x轴驱动结构通过连接件连接,所述连接件与所述蜗轮固定连接,所述连接件与所述x轴驱动结构的动力输出端转动连接,所述x轴驱动结构的动力输出端与所述旋转板连接。
9.优选的,所述x轴驱动结构包括x轴电机和x轴减速机,所述x轴电机的动力输出端
与所述x轴减速机传动连接,所述x轴减速机的动力输出端与所述旋转板传动连接;
10.所述y轴驱动结构包括y轴电机和y轴减速机,所述y轴电机的动力输出端与所述y轴减速机传动连接,所述y轴减速机的动力输出端与所述动结构传动连接。
11.本实用新型还提供了一种动态平衡训练系统,包括座椅运动组件、座椅训练组件、平衡训练组件和显示组件,所述座椅训练组件设置在所述座椅运动组件上,所述平衡训练组件设置在所述座椅训练组件的一侧,所述平衡训练组件和所述座椅训练组件中均设置有一所述的主被动平衡训练模块,所述座椅训练组件朝向所述显示组件设置,所述平衡训练组件设置在所述显示组件和所述座椅训练组件之间;所述显示组件包括互动球幕。
12.优选的,所述平衡训练组件还包括平台,所述平台包括内平台和外平台,所述外平台设置在所述内平台的外侧,所述内平台的底部设置有承重板,所述承重板与所述主被动平衡训练模块连接,所述承重板通过定位套与所述内平台连接,所述承重板的底部设置有若干重力传感器;所述外平台的下端设置有第一外法兰,所述内平台的下端设置有内法兰,所述内法兰和所述第一外法兰之间设置有第二外法兰,所述内平台和所述外平台通过若干拨杆机构实现分离和结合。
13.优选的,各所述拨杆机构均包括限位块、转换拨杆和拨杆支架,所述限位块设置在所述内平台上,所述转换拨杆和所述拨杆支架均设置在所述外平台上,所述拨杆支架上设置有第一滑槽,所述限位块中设置有第二滑槽,所述转换拨杆能够在所述第一滑槽和所述第二滑槽中滑动,所述拨杆支架上还设置有第一限位槽和第二限位槽。
14.优选的,所述座椅训练组件包括座椅底座,所述主被动平衡训练模块设置在所述座椅底座的下端,所述主被动平衡训练模块设置在所述座椅运动组件上,所述座椅底座的两侧设置有座椅扶手,各所述座椅扶手上设置有调节旋钮;
15.所述座椅扶手包括滑动连接的滑槽支架和导向支架,所述滑槽支架外部包裹有皮质海绵,所述滑槽支架上设置有第一条形孔,所述导向支架上设置有第二条形孔,所述第一条形孔和所述第二条形孔相匹配,所述调节旋钮伸入所述第一条形孔和所述第二条形孔并通过螺母固定。
16.优选的,所述座椅运动组件包括底架、x向移动机构、y向移动机构和z向移动机构,所述座椅训练组件设置在所述y向移动机构上,所述y 向移动机构设置在所述z向移动机构上,所述z向移动机构设置在所述x 向移动机构上,所述x向移动机构设置在所述底架上。
17.优选的,所述x向移动机构包括x向推杆和x向螺母,所述y向移动机构包括y向推杆、第一y向底板、第二y向底板,所述z向移动机构包括z向升降柱和z向底板;
18.所述x向推杆设置在所述底架的一侧,所述x向推杆上设置有与所述 x向推杆匹配的所述x向螺母,所述z向底板与所述x向螺母连接,所述 z向底板的下端与设置在所述底架上的x向导轨滑动连接,所述z向底板上设置有所述z向升降柱,所述z向升降柱的上端与所述第一y向底板连接,所述第一y向底板上设置有所述y向推杆,所述y向推杆与所述第二y向底板连接,所述第二y向底板的下端与设置在所述第一y向底板上的 y向导轨滑动连接,所述第二y向底板的上端与所述座椅训练组件连接。
19.优选的,所述底架上设置有第一链轮和第二链轮,所述第一链轮和所述第二链轮通过链条传动连接,所述链条上设置有若干链条挡板,所述第二链轮设置有涨紧结构。
20.本实用新型相对于现有技术取得了以下技术效果:
21.本实用新型的主被动平衡训练模块通过x轴驱动结构和y轴驱动结构对旋转板实现360度翻转控制,平台通过x向传感器与旋转板连接,从而实现对病人训练的控制。本实用新型能够满足平衡训练系统的多功能训练需求,外观美观,可以实现主被动训练,结构简单,可靠性高,便于维护,智能化程度高,能够减轻治疗师的工作压力。
附图说明
22.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
23.图1为本实用新型的主被动平衡训练模块示意图一(视角一);
24.图2为本实用新型的主被动平衡训练模块示意图二(视角二);
25.图3为本实用新型的主被动平衡训练模块俯视图;
26.图4为图3的a
‑
a剖视图;
27.图5为图3的b
‑
b剖视图;
28.图6为本实用新型的传动结构示意图;
29.图7为图6的c
‑
c剖视图;
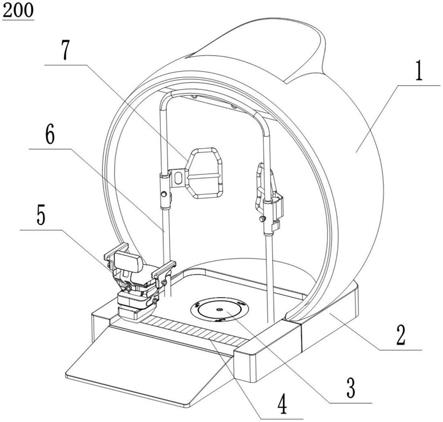
30.图8为本实用新型的动态平衡训练系统示意图;
31.图9为本实用新型的平台示意图一(视角一);
32.图10为本实用新型的平台示意图二(视角二);
33.图11为本实用新型的平台俯视图;
34.图12为本实用新型的座椅训练组件示意图;
35.图13为本实用新型的座椅扶手示意图;
36.图14为本实用新型的座椅运动组件示意图;
37.其中:100
‑
主被动平衡训练模块;200
‑
动态平衡训练系统;1
‑
显示组件; 2
‑
设备底座;3
‑
平衡训练组件;4
‑
座椅运动组件;5
‑
座椅训练组件;6
‑
吊架; 7
‑
扶手;8
‑
内平台;9
‑
外平台;10
‑
转换拨杆;11
‑
第一外法兰;12
‑
内法兰; 13
‑
第二外法兰;14
‑
定位套;15
‑
重力传感器;16
‑
拨杆支架;17
‑
限位块;18
‑ꢀ
承重板;19
‑
旋转板;20
‑
限位开关;21
‑
x轴电机;22
‑
连接件;23
‑
蜗轮;24
‑ꢀ
蜗杆;25
‑
加强轴;26
‑
y轴电机;27
‑
训练底板;28
‑
x向传感器;29
‑
x轴减速机;32
‑
y轴减速机;33
‑
第一y向底板;34
‑
链条挡板;35
‑
第一链轮;36
‑
z 向升降柱;37
‑
链条;38
‑
x向导轨;39
‑
x向推杆;40
‑
第二链轮;41
‑
底架; 42
‑
座椅底座;43
‑
座椅扶手;44
‑
调节旋钮;46
‑
x轴驱动结构;47
‑
y轴驱动结构;48
‑
传动结构;49
‑
拨杆机构;50
‑
第一滑槽;51
‑
第二滑槽;52
‑
第一限位槽;53
‑
第二限位槽;54
‑
x向移动机构;55
‑
y向移动机构;56
‑
z向移动机构;57
‑
x向螺母;59
‑
涨紧结构;102
‑
轴承盖;103
‑
轴承;104
‑
左立柱板; 105
‑
连接件挡板;106
‑
右立柱板;107
‑
左侧板;108
‑
x轴旋转轴承座;109
‑ꢀ
右侧板;110
‑
限位板;111
‑
法兰板;120
‑
蜗杆轴承挡板;121
‑
蜗杆挡板;122
‑ꢀ
蜗杆轴承座;123
‑
推力轴承;124
‑
滚珠轴承;126
‑
滚针轴承;127
‑
减速机法兰;301
‑
升降立柱连接件;302
‑
z向底板;303
‑
y向导轨;304
‑
y向导轨连接件;305
‑
第二y向底板;306
‑
y向运动底板连接件;307
‑
y向推杆;308
‑
y 向推杆连接件;401
‑
滑槽支架;402
‑
导向支架;403
‑
螺母;404
‑
第一条形孔; 405
‑
第二条形孔。
具体实施方式
38.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有付出创造性劳动的前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
39.本实用新型的目的是提供一种主被动平衡训练模块及动态平衡训练系统,以解决上述现有技术存在的问题,满足多功能训练需求,实现主被动训练,减轻治疗师的工作压力。
40.为使本实用新型的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本实用新型作进一步详细的说明。
41.实施例一
42.如图1
‑
图7所示:本实施例提供了一种主被动平衡训练模块100,包括旋转板19,x轴驱动结构46和y轴驱动结构47,x轴驱动结构46和y 轴驱动结构47通过传动结构48传动连接,旋转板19设置在x轴驱动结构 46上,旋转板19上设置有x向传感器28。主被动平衡训练模块100采用 x轴驱动结构46和y轴驱动结构47控制x轴和y轴的旋转运动,以实现主动和被动训练,同时主动训练时,x轴驱动结构46和y轴驱动结构47 可以实现阻尼控制,满足不同阻尼等级的康复训练。本实施例的主被动平衡训练模块通过x轴驱动结构46和y轴驱动结构47对旋转板19实现360 度翻转控制,平台通过x向传感器与旋转板连接,从而实现对病人训练的控制。本实施例能够满足平衡训练系统的多功能训练需求,外观美观,可以实现主被动训练,结构简单,可靠性高,便于维护,智能化程度高,能够减轻治疗师的工作压力。
43.本实施例中,传动结构48包括相互啮合的蜗杆24和蜗轮23,蜗杆24 与y轴驱动结构47的动力输出端连接,蜗轮23与x轴驱动结构46通过连接件22连接,连接件22与蜗轮23固定连接,连接件22与x轴驱动结构46的动力输出端转动连接,x轴驱动结构46的动力输出端与旋转板19 连接。
44.本实施例中,x轴驱动结构46包括x轴电机21和x轴减速机29,x 轴减速机29结构紧凑空间小,扭矩大,x轴电机21的动力输出端与x轴减速机29传动连接,x轴减速机29的动力输出端与旋转板19传动连接; y轴驱动结构47包括y轴电机26和y轴减速机32,y轴电机26的动力输出端与y轴减速机32传动连接,y轴减速机32的动力输出端与动结构传动连接。y轴电机26通过y轴减速机32减速,再带动蜗杆24、蜗轮23 转动,实现x轴驱动结构46整体绕y轴转动,x轴电机21通过x轴减速机29减速,实现旋转板19绕x轴转动。
45.本实施例中,x轴与图3中a
‑
a剖面线方向平行,y轴与图3中b
‑
b 剖面线b平行。
46.本实施例中,y轴驱动结构47固定在训练底板27上,蜗杆24的一端套设有蜗杆轴承座122,蜗杆轴承座122内部安装有推力轴承123和滚珠轴承124,推力轴承123和滚珠轴承124分别保证蜗杆24的轴向和径向受力。蜗杆轴承座122上安装有蜗杆轴承挡板120防止推力轴承123和滚珠轴承 124轴向移动,蜗杆24的一端安装有蜗杆挡板121,以防止蜗杆24轴向移动。蜗杆24的另一端套设有减速机法兰127,蜗杆24与减速机法兰127 之间设置有滚针轴承126,减速机法兰127用于y轴减速机32的连接,滚针轴承126用于蜗杆24的滚动。
47.本实施例中,连接件22设置左立柱板104和右立柱板106,连接件22 与左立柱板104和右立柱板106均通过轴承103转动连接,左立柱板104 与右立柱板106通过螺钉固定在
训练底板27上,左立柱板104和右立柱板 106之间通过加强轴25连接,保证稳定性。旋转板19与左侧板107和右侧板109连接成一体,可以整体旋转。右侧板109与x轴减速机29的输出法兰连接,左侧板107通过轴承103与x轴旋转轴承座108连接,x轴旋转轴承座108与连接件22连接为一体。x轴减速机29安装有减速机限位板 110防止x轴减速机29的内圈移动。
48.本实施例中,蜗杆24通过蜗轮23带动连接件22旋转,从而连接件22 带动x轴电机21、x轴减速机29和旋转板19整体跟随y轴电机26围绕 y轴做旋转运动。当x轴电机21转动时会带动x轴减速机29、旋转板19、左侧板107、右侧板109整体围绕x轴做旋转运动,从而实现平台的360 度翻转运动。
49.本实施例中,在训练底板27的右立柱板106和连接件22上安装有限位开关20,以实现x轴和y轴旋转角度的位置限位,确保平台运动安全。旋转板19上安装有x向传感器28以便检测病人前后方向的力量反馈。主被动平衡训练模块100的运动带着平台上的病人进行各种被动康复训练,同时,主动训练时,x轴电机21和y轴电机26可以提供阻尼控制,及时反馈位置和扭力并自适应补偿,完成不同等级阻尼的康复训练。
50.实施例二
51.如图8
‑
图14所示:本实施例提供了一种动态平衡训练系统200,包括座椅运动组件4、座椅训练组件5和平衡训练组件3,座椅训练组件5设置在座椅运动组件4上,平衡训练组件3设置在座椅训练组件5的一侧,平衡训练组件3和座椅训练组件5中均设置有一实施例一的主被动平衡训练模块100,座椅训练组件5可以实现座椅的360度翻转控制,满足病人的坐姿训练,当病人不需要坐姿训练时,座椅训练组件5可以不动保持水平,方便病人坐在座椅训练组件5上,然后将脚部放在平衡训练组件3上进行脚部关节训练。主被动平衡训练模块100使座椅训练组件5和平衡训练组件3在360度范围内实现13度
‑
28度的翻转。
52.本实施例中,动态平衡训练系统200还包括显示组件1,座椅训练组件 5朝向显示组件1设置,平衡训练组件3设置在显示组件1和座椅训练组件 5之间;显示组件1包括互动球幕,互动球幕是大型180度互动球幕,互动球幕包括球幕本体、固定底座、激光投影仪、光学反射镜,球幕本体由多块弧形球幕组成,弧形球幕由纵向龙骨和球幕横向龙骨组成,弧形球幕之间用螺栓连接,以保证球幕本体的稳定性,弧形球幕内表面由模具生成,并进行抛光处理,保证球幕内表面的光洁度,组装后的球幕本体内表面再进行专业的喷涂处理,保证整体球面的光洁度、高反光率。互动球幕主机内的游戏图像传输到激光投影仪,激光投影仪将游戏图像经过光学反射镜反射到球幕本体内表面,球幕本体内表面就会显示完整清晰的游戏画面。显示组件1外形类似宇宙天体的外型,而且视野广阔,内部配置高质量音箱,给人机互动提供了清晰逼真的视觉效果和前所未有的游戏体验,增加了训练过程中的乐趣,避免了长期而乏味的训练影响患者的康复进程,导致康复效果不理想的情况。
53.本实施例中,动态平衡训练系统200还包括设备底座2,座椅运动组件 4、平衡训练组件3和显示组件1均设置在设备底座2上,设备底座2上还设置有吊架6,吊架6设置在平衡训练组件3的外侧,吊架6上设置有扶手 7,吊架6和扶手7可以提供吊起防摔和手扶功能,保护患者的安全。
54.本实施例中,平衡训练组件3还包括平台,平台包括内平台8和外平台9,外平台9设置在内平台8的外侧,外平台9提供人体站立训练,内平台8提供坐姿时的脚部关节训练。内平台8的底部设置有承重板18,承重板18与主被动平衡训练模块100连接,承重板18通过定
位套14与内平台 8连接,承重板18的底部设置有若干重力传感器15,实现位置检测与力量反馈;外平台9的下端设置有第一外法兰11,内平台8的下端设置有内法兰12,内法兰12和第一外法兰11之间设置有第二外法兰13,第一外法兰 11、第二外法兰13和内法兰12起防护作用,内平台8和外平台9通过若干拨杆机构49实现分离和结合。
55.本实施例中,各拨杆机构49均包括限位块17、转换拨杆10和拨杆支架16,限位块17设置在内平台8上,转换拨杆10和拨杆支架16均设置在外平台9上,拨杆支架16上设置有第一滑槽50,限位块17中设置有第二滑槽51,转换拨杆10能够在第一滑槽50和第二滑槽51中滑动,拨杆支架 16上还设置有第一限位槽52和第二限位槽53。当不需要脚部关节训练时,转换拨杆10向内拨入限位块17里,转换拨杆10的把手放入第二限位槽53 中,实现内平台8和外平台9的结合,平台可以整体翻转;当需要脚部关节训练时,转换拨杆10向外拨入设备底座2里的转换拨杆限位块里,转换拨杆10的把手放入第一限位槽52中,实现内平台8和外平台9的分离,内平台8可以单独翻转。
56.本实施例中,座椅训练组件5包括座椅底座42,主被动平衡训练模块 100设置在座椅底座42的下端,座椅底座42上设置有若干重力传感器15,主被动平衡训练模块100设置在座椅运动组件4上,座椅底座42的两侧设置有座椅扶手43,各座椅扶手43上设置有调节旋钮44,座椅扶手43可以通过调节旋钮44调节高度以适应不同身高的病人。
57.本实施例中,座椅扶手43包括滑动连接的滑槽支架401和导向支架 402,滑槽支架401外部包裹有皮质海绵,滑槽支架401上设置有第一条形孔404,导向支架402上设置有第二条形孔405,第一条形孔404和第二条形孔405相匹配,调节旋钮44伸入第一条形孔404和第二条形孔405并通过螺母403固定。
58.本实施例中,座椅运动组件4实现座椅的x、y和z三个方向移动,以便不同身高的病人做不同类型的训练。座椅运动组件4包括底架41、x 向移动机构54、y向移动机构55和z向移动机构56,底架41焊接而成,座椅训练组件5设置在y向移动机构55上,y向移动机构55设置在z向移动机构56上,z向移动机构56设置在x向移动机构54上,x向移动机构54设置在底架41上。座椅运动组件4便于各种情况的使用,当病人需要站立训练时,座椅训练组件5可以移到设备的侧边,方便病人进行各种训练,而且还可以把坐轮椅的病人推上平台移走轮椅后进行训练;当需要坐姿和脚部关节训练时,座椅训练组件5会移动到中间位置,待病人坐好后就可进行康复训练。为了适合身高不同病人,座椅运动组件4可以实现前后、左右和上下位置移动,使得设备的应用范围很广。
59.本实施例中,x向移动机构54包括x向推杆39和x向螺母57,y向移动机构55包括y向推杆307、第一y向底板33、第二y向底板305,z 向移动机构56包括z向升降柱36和z向底板302;x向推杆39设置在底架41的一侧,x向推杆39上设置有与x向推杆39匹配的x向螺母57, z向底板302与x向螺母57通过升降立柱连接件301连接,z向底板302 的下端通过滑块与设置在底架41上的x向导轨38滑动连接,实现沿x向推杆39轴向(左右)的运动,z向底板302上设置有z向升降柱36,z向升降柱36为标准的医用级升降立柱,z向升降柱36的上端与第一y向底板33连接,z向升降柱36的升降实现沿z向升降柱36轴向(上下)的升降,第一y向底板33上设置有y向推杆307,y向推杆307与第一y向底板33通过y向推杆连接件308连接,y向推杆307通过y向运动底板连接件306与第二y向底板305连接,第二y向底板305的下端与设置在第一y向底板33上的y向导轨303通过y向导轨连接件304滑动连接,第二y向底板305的上端
与座椅训练组件5连接,y向推杆307带动座椅训练组件5实现沿y向导轨303轴向(前后)的运动。
60.本实施例中,底架41上设置有与底架41转动连接的第一链轮35和第二链轮40,第一链轮35和第二链轮40通过链条37传动连接,链条37上设置有若干链条挡板34,起防护作用,座椅运动组件4设置在两组链条37 之间且设置座椅运动组件4的位置不设置链条挡板34,第二链轮40设置有涨紧结构59,涨紧结构59为可调节轴承座,方便调整,底架41结构稳定、安装方便。
61.本实施例可以通过x向传感器28和重力传感器15统计病人在平衡训练中的各种数据,如位置、速度、扭力等,通过对这些数据的分析,在每次训练结束后给出一份评估报告给治疗师分析训练效果,并提供和上次训练结果的对比分析报告。
62.本实施例结构简单,平台控制简单,仅两个电机控制,可以提供阻尼控制实时反馈,可靠性高。本实施例给病人提供更加丰富的游戏训练项目,病人可以与球幕里清晰逼真的游戏人物进行互动,及时反馈修正,更好的完成训练。本实施例实现了一机多用,可适用于不同身高的人群,可实现坐姿和站姿的训练,可以实现主动和被动训练,而且可以实现阻尼控制,智能反馈,根据病人的训练状态实时反馈,跟踪训练,确保训练的安全性、科学性、合理性,满足平衡训练的多功能需求,本实施例外观美观,可以实现不同人群、各种关节的多样化训练,结构简单,可靠性高,便于维护,智能化程度高,能够减轻治疗师的工作压力。
63.本说明书中应用了具体个例对本实用新型的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本实用新型的方法及其核心思想;同时,对于本领域的一般技术人员,依据本实用新型的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本实用新型的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1