一种基于VR的吞咽障碍训练方法及其设备
一种基于vr的吞咽障碍训练方法及其设备
技术领域
1.本发明涉及老龄康复训练领域,尤其是涉及一种基于vr的吞咽障碍训练方法及其设备。
背景技术:
2.老年人由于从口腔前部到贲门的吞咽通道中的某一部分发生病变,吞咽反射径路的某一部位受损或受到邻近病变的影响,皆可导致不同程度的吞咽障碍,出现吞咽不畅、食管内食物积留、饮食向鼻腔反流或部分进入气管等病征,即吞咽障碍(deglutition disorder,dd)。吞咽障碍表现为呛咳,流口水、饭后总是清嗓子、进餐时间过长等。年龄是个重要的吞咽障碍相关因素,不仅老年脑卒中患者、老年性痴呆患者、帕金森患者多数伴有吞咽障碍,许多看起来正常的老年人其实已患有慢性吞咽障碍。据调查,约有50%老年人进食有困难,并因此而营养不足,体质量减轻。另一报道,老年人的吞咽障碍由多种因素造成,包括牙齿缺失、口腔敏感性减退、味觉和嗅觉改变、视力减退、目光注视与手的协调动作减退、独自进食、情绪抑郁等。吞咽障碍可导致营养不足和肌肉萎缩,后者加重了吞咽障碍的程度,这些因素在许多老年人中可能已经构成一种不良循环,相互影响,日益趋于严重。
3.目前吞咽障碍的康复训练可分为基础训练及摄食训练。
4.基础训练是针对那些与摄食、吞咽活动有关的器官进行训练,不用食物、针对吞咽功能障碍的间接训练。例如呼吸道训练(深吸气—憋气—咳出)的目的是提高咳出能力和防止误咳;反复轮换吞咽训练(进食吞咽后进行多次空吞咽)的目的是强化吞咽意识,除去咽部残留物。
5.摄食训练是实际进食的训练,在进食的同时,通过调整体位及食物种类/量,应用辅助吞咽动作练习的直接进食训练。
6.综上所述,对老年吞咽障碍的康复训练是非常重要的,对吞咽障碍患者进行康复护理训练越早越好,系统的康复训练可显著地提高吞咽功能。然而,目前针对吞咽障碍训练的设备较少:
7.(1)《一种用于吞咽障碍的吞咽训练及辅助的进食勺》(cn214260519u)提供了一种新型的进食勺,能够对患者进行咬合训练的同时,给与患者吞咽信号,使得患者的吞咽功能逐渐恢复;
8.(2)《一种新型吞咽训练器》(cn213994725u)提供了一种新型的吞咽训练器,满足咀嚼吞咽训练的需求,同时壳体的设计便于抓握,设计人性化,在吞咽训练的过程中通过小孔将食物吞咽至口腔,达到触觉、味觉的双重刺激,避免误吸,同时本实用新型结构简单,使用方便,为病患以及医护人员提高便利。
9.上述现有技术的功能比较单一,对患者缺乏足够的引导,并且没有评估功能。康复医院的吞咽障碍训练主要由康复科医生进行指导,临床护理人员协助进行训练。临床护理人员工作繁重,也没有经过系统训练;病人在进行基础训练过程中易出现动作不标准的情况,康复训练师根据经验指导病人训练,无定量评价标准;另进食训练存在一定的危险性,
容易出现呛咳甚至窒息等危险情况。
技术实现要素:
10.针对现有技术存在的上述问题,本技术提供了一种基于vr的吞咽障碍训练方法及其设备,通过vr技术和机械臂对训练者的吞咽训练进行正确的引导和辅助,并且能对患者的吞咽障碍情况给出定量评分,给训练计划的制订提供更科学的指导。
11.本发明的技术方案如下:
12.基于vr的吞咽障碍训练设备,包括吞咽状态识别设备、头戴式吞咽障碍康复训练vr设备;
13.所述吞咽识别设备包括加速度传感器1、角速度传感器2、pvdf压力传感器3、麦克风4和通信模块,用于识别张口、吞咽、反复吞咽、呛咳和窒息时的喉部状态;
14.所述加速度传感器1和角速度传感器2设置在下颌下方、喉部上方的位置,用于测量喉部软骨的微小上下运动;
15.所述pvdf压力传感器3设置在喉部的左侧或右侧位置,用于测量吞咽相关肌肉的机械肌电信号;
16.所述麦克风4用于记录吞咽音;
17.所述加速度传感器1、角速度传感器2、pvdf压力传感器3和麦克风4通过电缆连接到通信模块;通信模块通过蓝牙或wifi连接到头戴式吞咽障碍康复训练vr设备的计算模块5,并将来自加速度传感器1、角速度传感器2、pvdf压力传感器3和麦克风4的测量数据传输到计算模块5;所述计算模块5包括桌面个人电脑和软件;
18.所述头戴式吞咽障碍康复训练vr设备包括计算模块5、数据传输模块、显示模块6、机械臂8、摄像头9;
19.所述显示模块6通过vr电缆7连接到计算模块5,用于显示来自计算模块5的vr视频数据;
20.所述摄像头9设置在机械臂8上,其位置靠近机械臂8的触手,用于监测机械臂8的触手是否移动到位;
21.所述机械臂8一共有两个,分别设置在喉部的两侧;
22.所述机械臂8和摄像头9通过电缆连接到数据传输模块;数据传输模块通过机械臂电缆10连接到计算模块5,并将摄像头9的视频数据传输到计算模块5。
23.一种基于vr的吞咽障碍训练设备的吞咽训练方法,所述训练方法包括基础吞咽训练和虚拟摄食吞咽训练;
24.所述基础吞咽训练包括5种训练模式:
25.(1)口唇闭锁练习,即:紧闭口唇;
26.(2)下颌运动训练,即:先尽量张口,然后松弛并且下颌向两侧运动;
27.(3)声带内收训练,即:先深吸气,两手按住桌子或在胸前对掌,然后用力推压并且闭唇、憋气5秒钟;
28.(4)促进吞咽反射训练,即:用手指上下摩擦甲状软骨至下颌下方的皮肤,引起下颌的上下运动和舌部的前后运动,继而引发吞咽;
29.(5)声门上吞咽训练,即:由鼻腔深吸一口气,然后屏住气进行空吞咽,吞咽后立即
咳嗽。
30.进一步的,所述口唇闭锁练习的方法如下:
31.s1-1、训练者按照头戴式吞咽障碍康复训练vr设备的提示和演示,拿起系于两侧机械臂8的大纽扣,并放置于口中内衔,紧闭口唇;
32.s1-2、两侧机械臂8通过系线对大纽扣施加拉力;
33.s1-3、如果加速度传感器1的测量值的变化幅度小于预定的阈值,就认为口唇闭锁练习成功。
34.进一步的,所述下颌运动训练的方法如下:
35.s2-1、训练者按照头戴式吞咽障碍康复训练vr设备的提示和演示,执行张口和松弛下颌的动作;
36.s2-2、如果加速度传感器1和角速度传感器2的测量值的变化幅度都大于预定的阈值,就认为下颌运动训练成功。
37.进一步的,所述声带内收训练的方法如下:
38.s3-1、训练者按照头戴式吞咽障碍康复训练vr设备的提示和演示,先深吸气,两手按住桌子或在胸前对掌,然后用力推压并且闭唇、憋气5秒钟;
39.s3-2、如果pvdf压力传感器3的测量值的变化幅度大于预定的阈值,就认为声带内收训练成功。
40.进一步的,所述声带内收训练的方法如下:
41.s4-1、训练者按照头戴式吞咽障碍康复训练vr设备的提示和演示,静坐;
42.s4-2、单侧机械臂8的触手触摸患者的甲状软骨,并沿着皮肤往上移动至下颌下方,整个过程中单侧机械臂8的触手对患者施加的压力为定值;
43.s4-3、计算模块5通过pvdf压力传感器3获取颈部压力值和肌电曲线图。
44.进一步的,所述声门上吞咽训练的方法如下:
45.s5-1、训练者按照头戴式吞咽障碍康复训练vr设备的提示和演示,执行空吞咽和咳嗽的操作;
46.s5-2、计算模块5通过pvdf压力传感器3获取颈部压力值和肌电曲线图。
47.进一步的,所述虚拟摄食吞咽训练的方法如下:
48.s6-1、训练者按照头戴式吞咽障碍康复训练vr设备的提示和演示,调整坐姿至30
°
仰卧、颈部前倾体位;
49.s6-2、单侧机械臂8将汤勺送至患者嘴边;
50.s6-3、训练者按照头戴式吞咽障碍康复训练vr设备的提示和演示,依次完成以下四项操作:
51.(1)进食一口量流食;
52.(2)执行两次空吞咽;
53.(3)进食一口量流食;
54.(4)执行点头样吞咽;
55.s6-4、计算模块5通过pvdf压力传感器3获取步骤s6-3的颈部压力值和肌电曲线图。
56.本发明的吞咽识别设备,其设计原理如下:
57.(1)吞咽时引发喉部的微小复杂的震动,其吞咽音可以被麦克风捕捉到,麦克风可以采集到不同频率的声音;
58.(2)吞咽时,喉部软骨会有微小上下运动,这可以通过加速度计观测到;
59.(3)吞咽时需要颈部肌肉的参与,通过测量表面肌电信号可以来监测吞咽状态(吞咽、反复吞咽、窒息、呛咳等)。表面肌电信号是人体肌肉收缩时在皮肤表面通过电极引导、记录下来的神经肌肉系统活动时的生物电信号,它在一定程度上反应了人体神经肌肉的功能状态。
60.本发明使用pvdf膜来测量吞咽相关肌肉(咽部肌肉和咽下肌肉群)的表面机械肌电信号,分析肌肉的起搏时间和持续时间,定量评价不同的吞咽动作/运动,定量评价不同的喉部状态。此外,此技术还可以作为功能性电刺激触发器,提供一种有效的生物反馈,诱导吞咽运动,帮助患者在吞咽困难的治疗和康复过程中自愿吞咽。
61.本发明有益的技术效果在于:
62.(1)不同于目前吞咽障碍训练设备只能提供单一的训练模式,本发明提供了多种吞咽障碍训练模式,能够有效提高康复师对老年吞咽障碍患者的训练效率;
63.(2)本发明结合虚拟现实技术,老年吞咽障碍患者可以在进行针对吞咽障碍的间接训练(不用食物的基础训练)时更直观模仿学习vr设备显示屏中立体的标准吞咽障碍训练动作,提高训练效率与效果。其次,因摄食训练具有一定危险性,容易出现呛咳、窒息等情况,使用本发明,老年吞咽障碍患者可在虚拟情况下看到多种类食物形状、颜色,并调整体位/坐姿模拟进行摄食训练,有效降低摄食训练的危险性;
64.(3)本发明提供训练评估功能,吞咽状态识别设备(加速度传感器、角速度传感器、pvdf膜)采集喉部肌肉状态数据来评价吞咽训练动作是否标准,是否出现呛咳或反复吞咽等状态。喉部肌肉状态数据通过后期处理,可形成用户可视化结果,帮助康复师或者医生进行诊断吞咽状态是否得到改善,帮助制定下一步训练计划。
附图说明
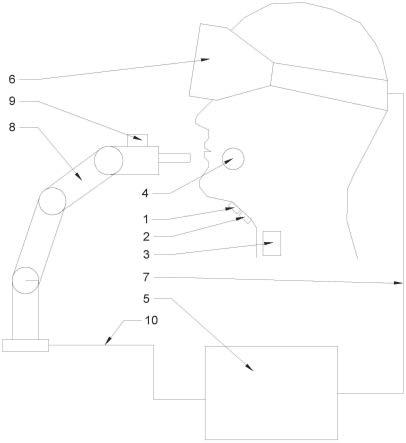
65.图1是本发明训练设备的结构示意图;
66.图2是训练模式示意图;
67.图3是主程序的流程图;
68.图4是口唇闭锁练习的流程图;
69.图5是下颌运动训练的流程图;
70.图6是声带内收训练的流程图;
71.图7是促进吞咽反射训练的流程图;
72.图8是声门上吞咽训练的流程图;
73.图9是虚拟摄食吞咽训练的流程图。
74.图中,部件名称与附图编号的对应关系为:1、加速度传感器;2、角速度传感器;3、pvdf压力传感器;4、麦克风;5、计算模块;6、显示模块;7、vr电缆;8、机械臂;9、摄像头;10、机械臂电缆。
具体实施方式
75.下面结合附图和实施例,对本发明进行具体描述。显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
76.如图1所示,实施例包括吞咽状态识别设备、头戴式吞咽障碍康复训练vr设备;
77.所述吞咽识别设备包括加速度传感器1、角速度传感器2、pvdf压力传感器3、麦克风4和通信模块,用于识别张口、吞咽、反复吞咽、呛咳和窒息时的喉部状态;
78.加速度传感器为惯性传感器mpu6050;角速度传感器为陀螺仪(epson,xv7001bb);pvdf薄膜传感器型号为ldt0-028k;
79.加速度传感器1和角速度传感器2设置在下颌下方、喉部上方的位置,用于测量喉部软骨的微小上下运动;
80.pvdf压力传感器3设置在喉部的左侧或右侧位置,用于测量吞咽相关肌肉的机械肌电信号;
81.麦克风4用于记录吞咽音;
82.加速度传感器1、角速度传感器2、pvdf压力传感器3和麦克风4通过电缆连接到通信模块;通信模块通过蓝牙或wifi连接到头戴式吞咽障碍康复训练vr设备的计算模块5,并将来自加速度传感器1、角速度传感器2、pvdf压力传感器3和麦克风4的测量数据传输到计算模块5;计算模块5包括桌面个人电脑和软件;
83.头戴式吞咽障碍康复训练vr设备包括计算模块5、数据传输模块、显示模块6、机械臂8、摄像头9;
84.显示模块6通过vr电缆7连接到计算模块5,用于显示来自计算模块5的vr视频数据;
85.摄像头9设置在机械臂8上,其位置靠近机械臂8的触手,用于监测机械臂8的触手是否移动到位;
86.机械臂8一共有两个,分别设置在喉部的两侧;
87.机械臂8和摄像头9通过电缆连接到数据传输模块;数据传输模块通过机械臂电缆10连接到计算模块5,并将摄像头9的视频数据传输到计算模块5。
88.如图2所示,实施例的训练模式包括基础吞咽训练和虚拟摄食吞咽训练b。其中,基础吞咽训练又包括5种训练模式:
89.(1)口唇闭锁练习a1,即:紧闭口唇;
90.(2)下颌运动训练a2,即:先尽量张口,然后松弛并且下颌向两侧运动;
91.(3)声带内收训练a3,即:先深吸气,两手按住桌子或在胸前对掌,然后用力推压并且闭唇、憋气5秒钟;
92.(4)促进吞咽反射训练a4,即:用手指上下摩擦甲状软骨至下颌下方的皮肤,引起下颌的上下运动和舌部的前后运动,继而引发吞咽;
93.(5)声门上吞咽训练a5,即:由鼻腔深吸一口气,然后屏住气进行空吞咽,吞咽后立即咳嗽。
94.如图3~9所示,实施例的工作流程如下:
95.s1、训练者佩戴好吞咽状态识别设备和头戴式吞咽障碍康复训练vr设备,静坐于
空旷空间;
96.s2、在计算模块5中输入训练者的个人信息,比如:年龄、体重、性别等;
97.s3、在计算模块5中选择训练模式;
98.s4、根据选择的训练模式执行不同的步骤:
99.如果选择的是口唇闭锁练习a1,则执行子任务1;
100.如果选择的是下颌运动训练a2,则执行子任务2;
101.如果选择的是声带内收训练a3,则执行子任务3;
102.如果选择的是促进吞咽反射训练a4,则执行子任务4;
103.如果选择的是声门上吞咽训练a5,则执行子任务5;
104.如果选择的是虚拟摄食吞咽训练b,则执行子任务6。
105.(1)子任务1的流程如图4所示:
106.s1-1、显示模块6上显示文字:“请拿起系线于单侧机械臂的大纽扣,并放置口中1内衔,紧闭口唇”,同时显示医生的虚拟影像,演示口唇闭锁练习的正确动作;
107.s1-2、训练者按照提示将大纽扣衔在口中并紧闭口唇;
108.s1-3、获取加速度传感器1的测量值a1;将口唇闭锁次数n重置为1;
109.s1-4、两侧机械臂同时对系线施加0.1n的拉力,此时的总拉力f=0.1n;
110.s1-5、两侧机械臂同时对系线增加0.1n的拉力,此处的总拉力f=0.2n;
111.s1-6、获取加速度传感器1的测量值a2,如果a1-5≤a2≤a1+5,就执行s1-7,否则执行s1-5;
112.s1-7、两侧机械臂同时对系线减少0.1n的拉力,此处的总拉力f=0.1n;
113.s1-8、等待30秒后,将口唇闭锁次数n加1;
114.s1-9、如果口唇闭锁次数n=5,就在显示模块6上显示文字:“结束口唇闭锁练习”。
115.(2)子任务2的流程如图5所示:
116.s2-1、显示模块6上显示文字:“请开始下颌运动训练”,同时显示医生的虚拟影像,演示下颌运动训练的正确动作;
117.s2-2、获取加速度传感器1的测量值a0和角速度传感器2的测量值w0;将下颌运动次数i重置为1;
118.s2-3、显示模块6上显示文字:“请张口”;
119.s2-4、获取加速度传感器1的测量值ai和角速度传感器2的测量值wi,并等待10秒;
120.s2-5、如果ai大于预先设定的加速度阈值amin,并且wi也大于预先设定的角速度阈值wmin,就在显示模块6上显示文字:“请松弛,本次动作标准”,并将下颌运动次数i加1,否则在显示模块6上显示文字:“请松弛,本次动作不标准,请重来”,并且重新播放医生的演示动作;
121.s2-6、如果下颌运动次数i=15,就在显示模块6上显示文字:“结束下颌运动训练”,否则重复执行s2-3至s2-6。
122.(3)子任务3的流程如图6所示:
123.s3-1、显示模块6上显示文字:“请开始声带内收训练,站立并且两手按在桌前”,同时显示医生的虚拟影像,演示声带内收训练的正确动作;
124.s3-2、等待5秒;
125.s3-3、获取pvdf压力传感器3的测量值bi;将声带内收次数i重置为1;
126.s3-4、如果bi大于预先设定的压力阈值bmin,就等待10秒,然后在显示模块6上显示文字:“请放松,本次动作标准”,并且将声带内收次数i加1,否则在显示模块6上显示文字:“请放松,本次动作不标准,请重来”,并且重新播放医生的演示动作;
127.s3-5、如果声带内收次数i=10,就在显示模块6上显示文字:“结束声带内收训练”,否则重复执行s3-2至s3-6。
128.(4)子任务4的流程如图7所示:
129.s4-1、显示模块6上显示文字:“请静坐,开始促进吞咽反射训练”,同时显示医生的虚拟影像,演示促进吞咽反射训练的正确动作;
130.s4-2、将促进吞咽反射训练次数i重置为1;
131.s4-3、单侧机械臂8触摸训练者的“甲状软骨”,同时促进吞咽反射训练次数i加1;
132.s4-4、单侧机械臂8沿着训练者的皮肤往上位移,位移过程中保持对皮肤的压力为定值;获取pvdf压力传感器3的测量值pi和肌电曲线图ei;
133.s4-5、摄像头9判断单侧机械臂8是否已经到达训练者的“下颌下方皮肤”,如果是,就执行s4-6,否则执行s4-4;
134.s4-6、如果促进吞咽反射训练次数i大于11,就在显示模块6上显示文字:“结束促进吞咽反射训练”,否则重复执行s4-4至s4-6;
135.s4-7、将十次pi和ei存入计算模块5的数据库中,等待后续分析处理吞咽时的喉部状态。
136.(5)子任务5的流程如图8所示:
137.s5-1、显示模块6上显示文字:“请静坐,开始声门上吞咽训练”,同时显示医生的虚拟影像,演示声门上吞咽训练的正确动作;
138.s5-2、将声门上吞咽训练次数i重置为1;
139.s5-3、将声门上吞咽训练次数i加1,同时在显示模块6上显示文字:“请由鼻腔深吸一口气,并屏住呼吸”,同时显示医生的演示动作;
140.s5-4、等待3秒;
141.s5-5、显示模块6上显示文字:“请进行空吞咽”,同时显示医生的演示动作;
142.s5-6、等待9秒,并在等待过程中获取pvdf压力传感器3的测量值pi和肌电曲线图ei;
143.s5-7、如果pi小于预先设定的压力阈值,就重复执行s5-6,否则执行s5-8;
144.s5-8、显示模块6上显示文字:“请进行咳嗽”,同时显示医生的演示动作;
145.s5-9、等待20秒,并在等待过程中获取pvdf压力传感器3的测量值pi和肌电曲线图ei;
146.s5-10、如果声门上吞咽训练次数i大于11,就在显示模块6上显示文字:“结束声门上吞咽训练”,否则重复执行s5-3至s5-10;
147.s5-11、将十次pi和ei存入计算模块5的数据库中,等待后续分析处理吞咽时的喉部状态。
148.(6)子任务6的流程如图9所示:
149.s6-1、从计算模块5的数据库中提取训练者的既往吞咽障碍训练数据,并且根据这
些数据对训练者进行评分,得到的评分即为吞咽障碍评分grade;
150.s6-2、如果grade不大于预先设定的阈值,就在显示模块6上显示文字:“请继续进行基础训练”,否则执行s6-3;
151.s6-3、在显示模块6上显示文字:“请开始3d虚拟摄食吞咽训练”;
152.s6-4、在显示模块6上显示文字:“请按照虚拟影像调整坐姿”,同时显示坐姿为30
°
仰卧并且颈部前倾的3d虚拟影像;
153.s6-5、在显示模块6上显示文字:“请进食一口流食”,同时显示吞咽流食的3d虚拟影像;单侧机械臂将汤勺送至训练者嘴边;
154.s6-6、等待30秒,并在等待过程中获取pvdf压力传感器3的测量值pi和肌电曲线图ei;
155.s6-7、如果pi小于预先设定的压力阈值,就重复执行s6-6,否则执行s6-8;
156.s6-8、在显示模块6上显示文字:“请进行两次空吞咽,可帮助去除滞留的食物残渣”,同时显示空吞咽的3d虚拟影像;
157.s6-9、等待20秒,并在等待过程中获取pvdf压力传感器3的测量值pi和肌电曲线图ei;
158.s6-10、如果pi小于预先设定的压力阈值,就重复执行s6-9,否则执行s6-11;
159.s6-11、在显示模块6上显示文字:“请进行点头样吞咽,可帮助去除咽部滞留食物”,同时显示点头样吞咽的3d虚拟影像;
160.s6-12、等待60秒,并在等待过程中获取pvdf压力传感器3的测量值pi和肌电曲线图ei;
161.s6-13、如果pi小于预先设定的压力阈值,就重复执行s6-12,否则执行s6-14;
162.s6-14、在显示模块6上显示文字:“结束3d虚拟摄食吞咽训练,稍后pc端可查看训练评分”。
163.尽管本发明的实施方案已公开如上,但其并不仅仅限于说明书和实施方式中所列运用,它完全可以被适用于各种适合本发明的领域,对于熟悉本领域的人员而言,对于本领域的普通技术人员而言,在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,因此在不背离权利要求及等同范围所限定的一般概念下,本发明并不限于特定的细节。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1