一种稳定干磨的自适应式重混凝土墙壁拆除装置
1.本发明涉及反应堆重混凝土拆除技术领域,特别是涉及一种稳定干磨的自适应式重混凝土墙壁拆除装置。
背景技术:
2.随着第一批反应堆服役期满,其退役问题日益受到各方面关注。反应堆生物屏蔽层的主要结构材料是重混凝土,重混凝土通常用特别密实和特别重的骨料制备,具有密度大、抗压强度高和不透α射线和γ射线的性能,因此主要作为核工程的屏蔽结构材料。为了辐射屏蔽的需要,通常在重混凝土中掺杂了大量金属。因此对反应堆生物屏蔽层重混凝土进行拆除解体是反应堆退役过程中难点之一。在重混凝土拆除解体的基础上必须进行适当铣刨去污处理。
3.目前,核反应堆内侧放射性重混凝土墙壁的去污、处理装置主要是brokk机器人。可对重混凝土反应堆进行铣刨去污,对核反应堆内侧放射性墙壁进行处理和回收。此外,还有一些常见的切割方法,如:空心镗削法、金刚石盘锯法。空心镗削法技术成熟、操作简单,但钻孔过程产生大量粉尘以及需要人员的近距离操作。金刚石盘锯通过金刚石粒子与被切割材料之间的刮划获得期望的锯痕。其结构类似于普通水泥切割机,在一定尺寸上的金属圆盘外沿添加金刚石材料,然后通过金属圆盘的高速旋转和锯片的平行移动实现对材料的切割。但在切割过程中需持续用水或者氮气对刀具进行冷却,对环境造成了污染。
4.上述拆除方法存在缺陷,在实际应用中会带来各种问题。
5.一、brokk机器人需要专门定制,价格昂贵,且维修不便。二、在拆除过程中所需动力大导致后坐力强,会出现装置底盘不稳定的问题,拆除效率大大降低。三、金刚石盘锯等常见的切割方法在工作过程中会使用冷却润滑液,从生态的角度看,冷却液的废物处理会导致环境污染,且辐射环境下严格禁止使用冷却液,否则会造成污染扩散;从经济角度看,冷却液、过滤和输送系统价格昂贵,而且需要占据巨大空间。而稳定干磨拆除技术正是这样的一种方法,它可较好地解决生态环境、技术与经济之间的协调与持续发展。在加工过程中,可提高装置的稳定性和避免冷却润滑剂的使用。针对以上现象,为了适应清洁生产工艺及减小生产成本的要求,解决常规拆除装置稳定性不足或使用冷却液油气产生核废水现象所带来的负面影响,本发明提出了一种稳定干磨的自适应式重混凝土墙壁拆除装置。
技术实现要素:
6.为了解决上述问题,本发明提供一种稳定干磨的自适应式重混凝土墙壁拆除装置及其方法。本发明可靠性高、稳定性好、实用性强,可以高效完成核反应堆重混凝土放射性墙壁的拆除工作。
7.为了实现上述目的,本技术提供如下技术方案一种稳定干磨的自适应式重混凝土墙壁拆除装置,包括履带移动装置、数控装置、升降台装置、铣刨磨削装置、滚轮跟进装置、气体吸收装置和物料输送系统;
8.所述履带移动装置用于保证自适应式重混凝土墙壁拆除装置的移动;
9.所述数控检测装置用于工人实现对自适应式重混凝土墙壁拆除装置的交互式操作;
10.所述升降台装置用于对液压升降台进行升降,从而带动铣刨打磨装置的升降;
11.所述铣刨打磨装置用于对重混凝土墙壁进行铣刨和打磨;
12.所述滚轮跟进装置用于径向固定,可提高整个装置的稳定性;
13.所述气体回收装置用于吸收一氧化碳气体;
14.所述物料输送系统用于石墨和二氧化碳气体的输送。
15.进一步地,所述铣刨打磨装置包括旋转接头、打磨刀头、腕部电机、小臂、大臂、第四液压缸、软管、铣刨刀头、半实心轴、旋转平台、紧固环、第三红外传感器和液压马达;
16.旋转接头安装于打磨刀头和铣刨刀头两端,打磨刀头固定在腕部,腕部电机安装在腕部,用于驱动打磨刀-头的旋转;液压马达驱动旋转平台旋转,通过第三红外传感器反馈,控制第四液压缸实现对小臂的伸缩;腕部电机驱动齿轮传动带动半实心轴旋转,从而刀头开始工作;半实心轴上均匀分布两排气孔,分别与铣刨刀头和打磨刀头内通孔吻合,从而实现石墨与二氧化碳混合物的输送;软管通过紧固环与大臂连接;紧固环用于把软管固定在大臂上、第三红外传感器安装在腕部前端,用于检测刀头与墙壁的距离。
17.进一步地,所述数控检测装置包括:超声波传感器、视觉传感器、数控装置、报警灯和显示屏;超声波传感器安装在液压式升降台右侧,用于检测周围障碍物与装置的距离;数控装置安装于液压式升降台右侧上方,用于接收和分析传感器反馈的信号;铣刨过程中,石墨和二氧化碳在铣刨刀头和打磨刀头内部通道发生反应生成一氧化碳气体,一氧化碳气体可由透气孔处排放;一氧化碳传感器可对一氧化碳浓度进行检测,浓度超过设定值会进行预警提示,从而报警灯闪烁;接收到传感器的信号可通过数控系统的分析,在显示屏上进行显示,并通过控制按钮进行相关操作。
18.进一步地,所述升降台装置包括第一液压缸、支撑支架、液压式升降台、伸缩支柱、第二液压缸和支撑平台;第一液压缸固定在支撑支架两侧,液压式升降台控制第一液压缸运动从而控制支撑支架的升降,从而实现支撑平台的升降运动;第二液压缸驱动伸缩支柱进行伸缩。
19.进一步地,所述滚轮跟进装置包括滚轮、伸缩手臂、压力传感器、第三液压缸;滚轮安装在伸缩手臂两端,与压力传感器相邻;第三液压缸驱动伸缩手臂进行伸缩,压力传感器反馈信号至数控系统,从而实现伸缩手臂对装置进行紧固;滚轮可跟随伸缩支柱进行移动。
20.进一步地,所述气体回收装置括一氧化碳传感器、空气动力装置、吸收筒、排风口和动力装置;
21.吸收筒内包括吸收剂和过滤网,一氧化碳传感器可对一氧化碳浓度进行检测,浓度超过设定值会进行预警提示;
22.空气动力装置开始启动,一氧化碳被吸入到吸收筒,从而吸收一氧化碳;排风口可将分离后的无害气体排出,动力装置可驱动排风口的运行。
23.进一步地,所述物料输送系统包括石墨箱、旋转接头、吸盘机构、进料口、压力罐、放料闸、伸缩管;物料输送系统在伸缩支柱内部,石墨由石墨箱进入到进料口,压力罐里储存有压缩二氧化碳气体,压力罐里的压缩二氧化碳气体可带动石墨进入伸缩管,伸缩管可
以伸缩,放料闸可以控制物料输送系统的开关;通过吸盘机构与伸缩支柱连接,从而实现两者的同步运动;第三红外传感器可检测石墨箱内石墨的含量从而进行填料;放料闸开启,则输送石墨和二氧化碳;放料闸关闭,系统停止输送;伸缩管为输送管道,实现管道的伸缩运动,进而能够随着伸缩支柱一起升降,并将石墨二氧化碳混合物输送至旋转接头;旋转接头四个固定端分别与与四根软管连接,进而通过软管与铣刨刀头和打磨刀头两侧旋转接头连接,从而将二氧化碳和石墨送入旋转轴空心一侧;
24.本发明还提供了一种稳定干磨的自适应式重混凝土墙壁拆除装置拆除的方法,该方法包括以下步骤:
25.步骤1、在显示面板中对控制系统输入指令,设置参数;拆除装置接收指令从而向指定地点前进,前进过程中如有障碍物可通过第一红外传感器和视觉传感器进行分析反馈,从而对拆除装置进行定位和位置调整;
26.步骤2、拆除装置到达指定位置后,升降台装置开始运行,第一液压缸开始工作,推动支撑支架的移动;支撑平台带动伸缩支柱升降;进而跟进滚轮到达指定位置开始运行,进行装置的紧固;第二液压缸开始工作,伸缩支柱开始缓慢移动;此时按动按钮,第四液压缸开始工作,通过第二红外传感器可对刀头进行定位,从而与重混凝土墙壁接触,此时铣刨刀头和打磨刀头开始工作;同时,液压马达开始工作,旋转平台控制大臂和小臂进行旋转作业,通过压力传感器可对旋转力矩进行控制,确保稳定作业;通过控制系统设置指定间歇时间;
27.步骤3、物料输送系统开始送料,石墨由石墨筒内进入压力罐,压力罐在真空泵的作用下开始加压,控制系统开启放料闸,压缩二氧化碳在压力罐的作用下混合石墨进入输送伸缩管;
28.步骤4、石墨和二氧化碳混合物在铣刨刀头和打磨刀头内进行高温条件下的吸热反应,对刀头进行冷却;此时石墨和二氧化碳混合物由软管进入旋转接头固定端,从而分别进入铣刨刀头和打磨刀头的半实心轴的空心一侧,在压力罐的作用下,混合物进入到刀具内部;此时刀具达到指定反应温度;石墨和二氧化碳进行强吸热反应,从而实现对铣刨刀头和打磨刀头的冷却;
29.步骤5、装置停止运行后,气体吸收装置开始工作,一氧化碳传感器对一氧化碳浓度进行检测,浓度超过设定值会进行预警提示;如果一氧化碳浓度值超过设定浓度,则空气动力装置开始启动,一氧化碳被吸入到吸收筒,从而吸收一氧化碳。
30.本发明的有益效果是:
31.1、采用干磨新工艺,通过石墨和二氧化碳在高温下进行吸热反应的原理对铣刨刀头和打磨刀头进行冷却,实现了绿色切割,避免了冷却润滑液的使用,降低了对环境的污染。
32.2、与常规拆除装置相比,本发明拆除效率更高、稳定性更强,较好地解决了传统拆除装置需要输出较高的力矩,从而导致后坐力强、稳定性不足的问题。
33.3、具有气体回收装置,如果产生的一氧化碳达到指定的浓度,气体吸收系统会进行工作,进行警报并吸收一氧化碳,对周围空气进行净化,保持较好的工作环境,防止对人体造成不必要的损害。
附图说明
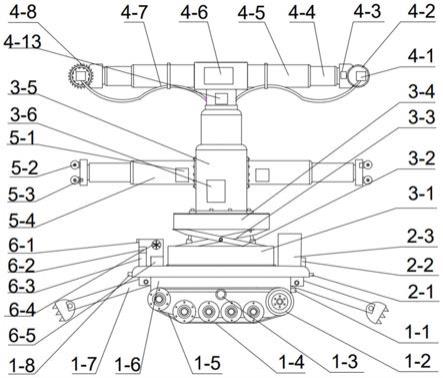
34.图1为本发明结构示意图;
35.图2为本发明铣刨刀模装置局部图;
36.图3为本发明铣刨刀头和打磨刀头局部示意图;
37.图4为本发明半实心轴结构示意图;
38.图5为本发明物料输送系统原理图;
39.图6为本发明物料输送系统结构示意图;
40.图7为本发明数控装置示意图。
41.其中:1-履带移动装置:1-1-第一红外传感器;1-2-链轮;1-3-滚轮;1-4-履带;1-5-行驶框架;1-6-固定平台;1-7-可调节支撑爪;1-8-超声波传感器;2-数控装置:2-1-超声波传感器;2-2-视觉传感器;2-3-数控装置;2-4-报警灯;2-5-显示屏;2-6-控制按钮;3-升降台装置:3-1-液压式升降台;3-2-第一液压缸;3-3-支撑支架;3-4-支撑平台;3-5-伸缩支柱;3-6-第二液压缸;4-铣刨磨削装置:4-1-旋转接头;4-2-打磨刀头;4-2-1-通孔;4-2-2-透气孔;4.3-腕部电机;4-4-小臂;4-5-大臂;4-6-第四液压缸;4-7-软管;4-8-铣刨刀头;4-8-1-通孔;4-8-2-透气孔;4-9-半实心轴;4-9-1-实心侧;4-9-2-气孔;4-9-3-空心一侧;4-10-旋转平台;4-11-紧固环;4-12-第二红外传感器;4-13-液压马达;5-滚轮跟进装置;5-1-第三液压缸;5-2-滚轮;5-3-压力传感器;5-4-伸缩手臂;6-气体吸收装置;6-1-一氧化碳传感器;6-2-空气动力装置;6-3-吸收筒;6-4-排风口;6-5-动力装置;7-1-石墨箱;7-1-1-第三红外传感器;7-2-旋转接头;7-3-吸盘机构;7-4-伸缩管;7-5-气力输送装置。
具体实施方式
42.为了使本领域的技术人员更好地理解本技术的技术方案,以下将通过实施例并结合附图对本发明做进一步详细说明。
43.如下图1所示,本发明的一种稳定干磨的自适应式重混凝土墙壁拆除装置包括履带移动装置1、数控装置2、升降台装置3、铣刨磨削装置4、滚轮跟进装置5、气体吸收装置6和物料输送系统7。
44.所述履带移动装置用于保证自适应式重混凝土墙壁拆除装置的移动;
45.所述履带移动装置1包括第一红外传感器1-1、链轮1-2、滚轮1-3、履带1-4、行驶框架1-5、固定平台1-6、可调节支撑爪1-7和超声波传感器1-8。链轮1-2转动,从而带动履带1-4运动。滚轮1-3用于支撑履行,调节履带的张紧程度。行驶框架1-5用于安装固定链轮1-2等部件。四个可调节支撑爪1-7分别安装于所述履带移动装置的外周位置。履带移动装置固定作业时,四个可调节支撑爪1-7可打开并支撑于地面。
46.固定平台1-6两侧安装超声波传感器1-8,通过发射探头发射出超声波,超声波在介质中遇到障碍物而返回接收装置,通过接收自身发射的超声波反射信号,根据超声波发出及回波接收时间差及传播速度,计算出传播距离,就能得到障碍物与装置之间的距离。固定平台前端安装第一红外线传感器1-1,可对障碍物进行定位。
47.固定平台前端安装视觉传感器2-2,对周围的环境进行光学处理,将采集到的图像信息进行压缩。
48.上述传感器信号反馈到由神经网络和统计学方法构成的数控装置,然后由子系统
将采集到的图像信息与拆除装置的实际位置联系起来,完成定位和移动。到达指定位置后,四个可调节支撑爪1-7与地面接触,实现装置的固定。
49.参考图2至图7,所述数控检测装置2用于工人实现对自适应式重混凝土墙壁拆除装置的交互式操作。
50.所述数控检测装置2包括:超声波传感器2-1、视觉传感器2-2、数控装置2-3、报警灯2-4、显示屏2-5和控制按钮2-6;超声波传感器2-1安装在液压式升降台右侧,用于检测周围障碍物与装置的距离。数控装置2-3安装于液压式升降台右侧上方,用于接收和分析传感器反馈的信号。
51.固定平台前端安装视觉传感器2-2,对周围的环境进行光学处理,将采集到的图像信息进行压缩。
52.铣刨过程中,石墨和二氧化碳在铣刨刀头4-8和打磨刀头4-2内部通道发生反应生成一氧化碳气体,一氧化碳气体可由透气孔处排放。一氧化碳传感器6-1可对一氧化碳浓度进行检测,浓度超过设定值会进行预警提示,从而报警灯2-4闪烁。接收到传感器的信号可通过数控系统的分析,在显示屏2-5上进行显示,并通过控制按钮进行相关操作。
53.所述升降台装置3用于对液压升降台进行升降,从而带动铣刨打磨装置的升降;
54.所述升降台装置3包括第一液压缸3-2、支撑支架3-3、液压式升降台3-1、伸缩支柱3-5、第二液压缸3-6和支撑平台3-4;第一液压缸3-2固定在支撑支架3-3两侧,液压式升降台3-1控制第一液压缸3-2运动从而控制支撑支架3-3的升降,从而实现支撑平台3-4的升降运动。第二液压缸3-6驱动伸缩支柱3-5进行伸缩。
55.所述滚轮跟进装置5用于径向固定,可提高整个装置的稳定性;
56.所述滚轮跟进装置5包括滚轮5-2、伸缩手臂5-4、压力传感器5-3、第三液压缸5-1。滚轮5-2安装在伸缩手臂5-4两端,与压力传感器5-3相邻。第三液压缸5-1驱动伸缩手臂5-4进行伸缩,压力传感器5-3反馈信号至数控系统,从而实现伸缩手臂5-4对装置进行紧固。滚轮可跟随伸缩支柱3-5进行移动。
57.所述气体回收装置6用于吸收一氧化碳气体;
58.包所述气体回收装置6括一氧化碳传感器6-1、空气动力装置6-2、吸收筒6-3、排风口6-4和动力装置6-5;
59.吸收筒6-3内包括吸收剂和过滤网,一氧化碳传感器6-1可对一氧化碳浓度进行检测,浓度超过设定值会进行预警提示。
60.空气动力装置6-2开始启动,一氧化碳被吸入到吸收筒6-3,从而吸收一氧化碳。排风口6-4可将分离后的无害气体排出,动力装置6-5可驱动排风口的运行。
61.所述铣刨打磨装置用于对重混凝土墙壁进行铣刨和打磨;
62.所述铣刨打磨装置包括旋转接头4-1、打磨刀头4-2、腕部电机4-3、小臂4-4、大臂4-5、第四液压缸4-6、软管4-7、铣刨刀头4-8、半实心轴4-9、旋转平台4-10、紧固环4-11、第三红外传感器4-12和液压马达4-13;旋转接头4-1安装于打磨刀头4-2和铣刨刀头4-8两端,打磨刀头4-2固定在腕部,腕部电机4-3安装在腕部,用于驱动打磨刀-头的旋转。液压马达4-13可驱动旋转平台4-10旋转,通过第三红外传感器4-12反馈,控制第四液压缸4-6实现对小臂4-4的伸缩。腕部电机4-3驱动齿轮传动带动半实心轴4-9旋转,从而刀头开始工作。半实心轴4-9上均匀分布两排气孔4-9-2,分别与铣刨刀头4-8和打磨刀头4-2内通孔吻合,从
而实现石墨与二氧化碳混合物的输送。旋转接头有两个接口,包括固定一侧和旋转运动一侧,旋转运动一侧与半实心轴空心一侧4-9-3连接,旋转接头固定一侧与输送系统软管4-7连接,软管4-7通过紧固环4-1与大臂4-5连接。紧固环4-11用于把软管4-7固定在大臂4-5上、第三红外传感器4-12安装在腕部前端,用于检测刀头与墙壁的距离。
63.所述物料输送系统7用于石墨和二氧化碳气体的输送;
64.所述物料输送系统7包括石墨箱7-1、旋转接头7-2、、吸盘机构7-3、进料口、压力罐、放料闸、伸缩管;物料输送系统在伸缩支柱3-5内部,石墨由石墨箱进入到进料口,压力罐里储存有压缩二氧化碳气体,压力罐里的压缩二氧化碳气体可带动石墨进入伸缩管,伸缩管可以伸缩,放料闸可以控制物料输送系统的开关。在支撑平台3-4上。通过吸盘机构7-3与伸缩支柱3-5连接,从而实现两者的同步运动。第三红外传感器7-1-1可检测石墨箱7-1内石墨的含量从而进行填料。放料闸开启,则输送石墨和二氧化碳;放料闸关闭,系统停止输送。伸缩管7-4为输送管道,可实现管道的伸缩运动,进而可以随着伸缩支柱3-5一起升降,并将石墨二氧化碳混合物输送至旋转接头7-2。旋转接头四个固定端分别与与四根软管4-7连接,进而通过软管4-7与铣刨刀头4-8和打磨刀头4-2两侧旋转接头4-1连接,从而将二氧化碳和石墨送入旋转轴4-9空心一侧4-9-3。
65.该实施例还提供了一种稳定干磨的自适应式重混凝土墙壁拆除的方法,该方法包括以下步骤:
66.步骤1、在显示面板中对控制系统输入指令,设置参数。拆除装置接收指令从而向指定地点前进,前进过程中如有障碍物可通过第一红外传感器1-1和视觉传感器2-2进行分析反馈,从而对拆除装置进行定位和位置调整。
67.步骤2、拆除装置到达指定位置后,升降台装置3开始运行,第一液压缸3-2开始工作,推动支撑支架3-3的移动。支撑平台3-4带动伸缩支柱3-5升降。进而跟进滚轮5-2到达指定位置开始运行,进行装置的紧固。第二液压缸3-6开始工作,伸缩支柱3-5开始缓慢移动。此时按动按钮2-6,第四液压缸4-6开始工作,通过第二红外传感器4-12可对刀头进行定位,从而与重混凝土墙壁接触,此时铣刨刀头4-8和打磨刀头4-2开始工作。同时,液压马达4-13开始工作,旋转平台4-10控制大臂4-5和小臂4-4进行旋转作业,通过压力传感器可对旋转力矩进行控制,确保稳定作业。通过控制系统2设置指定间歇时间。
68.步骤3、物料输送系统7开始送料,石墨由石墨筒7-1内进入压力罐,压力罐在真空泵的作用下开始加压,控制系统开启放料闸,压缩二氧化碳在压力罐的作用下混合石墨进入输送伸缩管7-4。
69.步骤4、石墨和二氧化碳混合物在铣刨刀头4-8和打磨刀头4-2内进行高温条件下的吸热反应,对刀头进行冷却。此时石墨和二氧化碳混合物由软管4-7进入旋转接头7-2固定端,从而分别进入铣刨刀头4-8和打磨刀头4-2的半实心轴4-9的空心一侧4-9-3,在压力罐的作用下,混合物进入到刀具内部。此时刀具达到指定反应温度。石墨和二氧化碳进行强吸热反应,从而实现对铣刨刀头4-8和打磨刀头4-2的冷却。
70.步骤5、装置停止运行后,气体吸收装置6开始工作,一氧化碳传感器6-1对一氧化碳浓度进行检测,浓度超过设定值会进行预警提示。如果一氧化碳浓度值超过设定浓度,则空气动力装置6-5开始启动,一氧化碳被吸入到吸收筒6-3,从而吸收一氧化碳。
71.以上对本发明所提供的一种稳定干磨的自适应式重混凝土墙壁拆除装置及其方
法进行了详细的介绍,但应理解的是,这些描述仅仅用具体的个例对原理以及实施方式进行阐述,并非用来限制本发明专利的应用。本发明的保护范围由附加权利要求限定,并可包括在不脱离本发明专利保护范围和精神下针对发明专利所做的各种变性,改革及等效方案。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1