用于限制作业机器的移动的设备和方法与流程
用于限制作业机器的移动的设备和方法
1.相关申请的交叉引用
2.本技术是2021年2月25日提交的题为“apparatus and method for limiting movement of a work machine”的美国专利申请序列号no.17/249,258的部分继续申请,通过引用而将其全部公开内容并入于此。
技术领域
3.本公开涉及用于作业机器(work machine)的设备和方法。
背景技术:
4.操作员在工作期间主动监控在工地执行的作业。然而,不平整的环境和长时间可能导致操作员疲劳。如果操作员未能保持警惕,这就会导致例如在挖掘直边时的不一致性。在特别不利的情形下,可能发生机器停机以纠正任何不准确度。停机时间可能随时间累积并变得相当长。由于对寻找员工的潜在挑战,因此对有经验操作员的高度依赖可能降低效率。例如,利用多个控件(control)来移动挖掘机上的动臂(boom arm)对于见习操作员来说可能不够直观,并且需要数个工时的培训。其中存在通过改进作业机器及其操作方法来减少这种对操作员的依赖的可能性。这在作业机器行进期间是特别相关的,在作业机器行进期间该作业机器可能需要在各个工地附近移动。
技术实现要素:
5.提供本发明内容以介绍选择的下面在详细说明的描述和附图中进一步描述的概念。本发明内容并非旨在标识所附权利要求的关键特征或基本特征,也不是旨在用作帮助确定所附权利要求的范围。
6.本公开包括一种作业机器,该作业机器包括动力源、动力转换系统、行进主体(traveling body)、可移动结构、用户输入部、定位传感器以及控制器。该行进主体包括地面接合机构(ground-engaging mechanism),该地面接合机构联接至动力转换系统并从该动力转换系统接收动力,并且该地面接合机构能够控制以使该行进主体相对于地表沿着行进路径移动。该可移动结构联接至行进主体,并且该可移动结构具有致动器,该致动器能够控制以使可移动结构相对于行进主体移动。该用户输入部能够由作业机器的操作员致动,其中,该用户输入部生成用户输入信号以控制地面接合机构。该定位传感器能够操作以生成定位感测信号。该控制器与定位传感器和用户输入部进行通信,其中,该控制器包括处理器和存储器,该存储器上存储有位置控制算法。该处理器能够操作以执行进行以下项的位置控制算法。该处理器接收用户输入信号。该处理器接收定位传感器信号,该定位传感器信号包括与为了创建边界限制而使可移动结构相对于行进主体进行的移动相关的信息。该边界限制是随着行进主体的移动而更新的。该处理器确定可移动结构相对于行进主体的位置;以及响应地控制动力转换系统,以控制地面接合机构和致动器中的一个或更多个,从而避免边界限制与从物体检测传感器感测到的物体的干涉。
7.该处理器随着行进主体的移动而连续确定可移动结构相对于行进主体的位置。
8.该边界限制包括竖直平面,其中,该竖直平面基于行进主体和可移动结构中的一个或更多个的最外侧点(outermost point)而移位。该竖直平面可以采用同心圆来包围作业机器。
9.该物体检测传感器可以包括联接至作业机器的立体成像设备,其中,该位置控制算法对物体检测传感器信号进行处理以从立体图像中识别物体。
10.该物体检测传感器可以包括联接至作业机器的lidar成像设备,其中,该位置控制算法还对物体检测传感器信号进行处理以从点云中识别物体。
11.当边界限制与物体产生干涉或者预见与物体产生干涉时,该位置控制算法可以优于(override)操作员输入命令。
12.根据本公开的另一方面,提供了一种随着作业机器的行进而响应地控制动力转换系统以限制该作业机器的移动的方法,其中,该作业机器包括行进主体,该行进主体具有联接至该行进主体的可移动结构。所述方法包括以下步骤:从能够由操作员致动的用户输入部接收用户输入信号,以对作业机器的地面接合机构进行控制;从定位传感器接收定位传感器信号;确定可移动结构相对于行进主体的位置;以及响应地控制动力转换系统,以对地面接合机构和动臂位置中的一个或更多个进行控制,从而避免边界限制与从物体检测传感器感测到的物体的干涉。所述方法还可以包括以下步骤:当边界限制与物体产生干涉或者预见与物体产生干涉时,超控(override)用户输入信号。
13.根据下面详细说明的描述和附图,这些及其它特征将变得显而易见,其中,通过例示的方式示出并描述了各种特征。本公开能够具有其它和不同的配置,并且其若干细节能够在各种其它方面进行修改,所有这些都不脱离本公开的范围。因此,详细说明的描述和附图本质上要被视为例示性的而非限制性的或者进行限制。
附图说明
14.附图的详细描述涉及附随的图,其中:
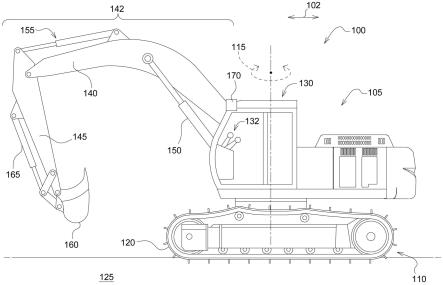
15.图1是根据第一实施方式的被示出为挖掘机(excavator)的作业机器的侧视图;
16.图2是第一实施方式在其环境中的示意性正视图;
17.图3是图1所示的第一实施方式的移动限制部件的系统图;
18.图4是第一实施方式的移动包络(movement envelope)的图;
19.图5是第一实施方式在其环境中的示意性俯视图;
20.图6是限制作业机器的移动的方法的流程图;
21.图7是控制动力转换以避免边界限制与所感测的物体的干涉的系统图;
22.图8是第一实施方式的示意性俯视图,其中竖直平面随着作业机器的移动而动态移位;以及
23.图9是随着作业机器的行进而响应地控制动力转换系统以限制该作业机器的移动的方法。
24.贯穿多个图,相同的标号用于指示相同的要素。
具体实施方式
25.在上面的附图和下面详细说明的描述中公开的实施方式不旨在是详尽的或者将本公开限于这些实施方式。而相反,在不脱离本公开的范围的情况下可以进行若干变化和修改。
26.除非另外限制或修改,否则如本文所使用的具有由连接词术语(例如“和”)分开并且之前还有短语
“…
中的一个或更多个”或者
“…
中的至少一个”的要素的列表指示潜在地包括列表的单独要素或其任何组合的配置或布置。例如,“a、b以及c中的至少一个”或者“a、b以及c中的一个或更多个”指示仅a、仅b、仅c、或者a、b及c中的两个或更多个的任何组合(例如,a和b;b和c;a和c;或a、b以及c)的可能性。
27.如本文所使用的,术语“控制器”是包括处理器和存储器的计算装置。“控制器”可以是单个装置或者另选地为多个装置。控制器180还可以单独地或者以任何组合来指代任何硬件、软件、固件、电子控制组件、处理逻辑、处理装置,包括而不限于:执行一个或更多个软件或固件程序的专用集成电路(asic)、电子电路、处理器(共享、专用、或组)以及存储器、组合逻辑电路、和/或提供这些功能的其它合适组件。
28.术语“处理器”被描述和示出为单个处理器。然而,根据控制器和这些功能的特定需要、希望或特定实现,可以使用两个或更多处理器。处理器可以是控制器的组件、物体检测器的一部分、或者另选地为另一装置的一部分。通常,处理器可以执行指令并且可以操纵数据以执行控制器的操作,包括使用本公开中描述的算法、方法、函数、处理、流程以及过程的操作。
29.图1是作业机器100的示例性实施方式的侧视图。将作业机器100具体实施为挖掘机,该挖掘机包括枢转地联接至行进主体110(底架)的可移动结构105(上框架)。可以将可移动结构105借助于回转(swing)枢轴枢转地联接在行进主体110上,使得可移动结构105能够沿偏航(yaw)方向115旋转。行进主体110包括地面接合机构120,包括但不限于履带和车轮。所示的地面接合机构120包括在行进主体110的相反两侧上的一对地面接合履带,用于沿着地表125移动。可移动结构105包括操作员控制挖掘机的操作员室130(但不是必需的,即,这可以通过远程进行)。这些控件132可以包括:方向盘、控制杆、控制踏板、控制按钮以及具有显示器的图形用户输入界面,这使得操作员能够输入命令135。挖掘机的可移动结构105还包括动臂总成142以及斗柄145,该动臂总成142包括邻近操作员室的大动臂140(动臂总成142的第一节段)。大动臂140是可旋转的,并且通过致动大动臂致动器150(第一致动器)而相对于操作员室130形成竖直弧形。斗柄145联接至大动臂140,并且可借助于斗柄致动器155(第二致动器)相对于大动臂140枢转。联接至斗柄145的端部的是附件160,其中,该附件160可通过附件液压缸165相对于斗柄145枢转。在挖掘机的示例性实施方式中,可移动结构105包括:操作员室130、大动臂140、斗柄145以及附件160。
30.作业机器100还包括能够操作以生成感测信号175的传感器170。与传感器170通信的控制器180包括处理器185和存储器190,该存储器190上存储有位置控制算法195。处理器185能够操作以执行位置控制算法195以进行如下操作:接收边界命令200,该边界命令200建立相对于地表125的限定边界205;从传感器170接收感测信号175;确定可移动结构105相对于行进主体110的位置;以及当可移动结构105的位置处于距限定边界205的可允许距离215内时,随着行进主体110沿着行进路径210的移动,而对行进主体110的地面接合机构120
或可移动结构105的致动器中的一个的移动进行限制,以防止可移动结构105移动超过限定边界205。
31.随着行进主体110沿着行进路径210的移动,处理器185连续确定可移动结构105相对于限定边界205的位置。这种监测可以通过对行进主体110的位置的第一确定222以及对可移动结构105相对于行进主体110和地表125两者的位置的第二确定224而发生。
32.边界命令200可以包括以下项中的一个或更多个:预规划路径201、工地指令202、一系列路点(waypoint)203、以及作对业后地表204的识别。
33.在示例性实施方式中,一系列路点203可以从鸟瞰图像(bev:bird’s eye view图像)、存储器或“跟随”另一作业机器的作业机器导出。
34.如图3所示,在一个示例性应用中,利用上面提及的部件挖掘直线沟槽的斗式附件160形成直线行进特征207。直线行进特征207提供了简单的单踏板机械控件(即,操作员输入命令135),其中,挖掘机在移动中被限制为沿直线(即,限定边界205)移动,以用于诸如管道铺设、物料处理、地下设施的安装、以及树苗放置等等活动。可移动结构105相对于地表125的移动以及将可移动结构的移动限制在限定边界205的可允许距离215内,有利地使得作业机器100能够自动或半自动移动以形成沟槽。操作变为半自主模式下的协作(操作员与作业机器100之间)。随着操作员在可允许距离215内移动可移动结构105,机器可以在遵循边界命令200的同时有效地“锁定到位(lock into position)”。该系统为偏离行进路径210的操作提供了很少的灵活性。在一个实例中,限定边界205可以是表示沟槽边缘或作业后地表204的直线,如随着作业机器遵循边界命令200而从处理沟槽图像的感测信号175中识别的直线。在另一实例中,限定边界205可以从工地指令202(例如,路径规划、预定端点、预定长度)或一系列路点203导出。在与地表125接合期间的可移动结构105(或者更特别地在沟渠建造应用中的铲斗附件160)的可允许距离215表示:一旦通过操作员的命令被输入了,铲斗附件就随着作业机器100继续向前移动而继续保持的区域。这是一种将工地指令与作业机器的实际移动物理集成的方式。在图3所示示例中,行进路径210沿行进主体110的前后方向102延伸。如图2所示,发生至少两种程度的处理,其包括:可移动结构105相对于地表125的第一确定222,以及行进主体110相对于可移动结构105的第二确定224。操作员输入命令135(例如,上面公开的申请中的单踏板)可以维持半自主模式,其中,操作员使作业机器100向前移动,同时处理器185通过调节地面接合机构120来基于感测信号175自动地确定该作业机器应当如何向前移动,以及必须通过调节偏航角245对可移动结构105绕偏航轴线115(图5所示)进行什么调节。
35.限制可移动结构105的移动还可以包括确定移动包络214。移动包络214可以位于从偏航轴线115起沿着动臂总成142的平面232径向延伸的平面中。图4是与图1所示的作业机器100(在这种情况下是挖掘机)相关的移动包络214的线示意图。移动包络214是由点225的可能移动范围来限定的,该点225靠近动臂总成142的远离操作员室130定位的部分。点225的位置是由大动臂致动器150和斗柄致动器155的长度来限定的。由点225绘制的移动包络214的周界230(如黑实线所指定的)是由处于完全伸出或缩回位置的大动臂致动器150和斗柄致动器155中的一个或更多个来限定的。大动臂液压缸移动的周界由一系列第一几何构型(geometric configuration)235示出,该系列第一几何构型是由动臂总成142(图1所示)的机械连杆来限定的。还可以将处理器185配置成,禁止将点225移动至移动包络214内
的多个节点,在这些节点中,致动器容量不足以移动有效载荷,并且位置控制算法195已经确定了限定边界205。在另选简化实施方式中,限定边界205可以简单为处于移动包络214的最外侧点处或其外部的竖直平面250。
36.现在转至图5,示出了作业机器100的俯视图。如先前所讨论的,限制可移动结构105的移动还可以包括相对于行进主体110的偏航角245。更特别地,偏航角245是可移动结构105绕偏航轴线115从零度分界线260起的旋转。还可以将零度分界线260定义为可移动结构105相对于行进主体110的默认对准。在所示的挖掘机的实施方式中,零度分界线260沿行进主体110的前后方向102延伸(即,在各个地面接合机构120之间)。即,在挖掘机的所示示例中作为可移动结构105的一部分的动臂总成142可以在零度分界线260处沿前后方向102定向。零度分界线260和偏航轴线115可以取决于作业机器100的类型并且可以被任意指派。
37.在一个实施方式中,传感器170包括联接至作业机器的立体成像设备265,其中,位置控制算法195对感测信号175进行处理,以从立体图像中识别限定边界205。位置控制算法195进一步对感测信号175进行处理,以随着感测信号175的连续更新而识别移动物体。
38.在另一实施方式中,传感器170包括联接至作业机器的lidar成像设备270,其中,位置控制算法195对感测信号175进行处理,以从点云275中识别限定边界205。使用该系统的另一优点包括:随着作业机器100切开(carve)地表125而维持附件160(例如,在反铲装载机中)的坡度控制。
39.在另一实施方式中,处理器185接收致动行进主体110和可移动结构105中的一个或更多个的移动的操作员输入命令135。当可移动结构105处于距限定边界205的可允许距离215内时,位置控制算法195可以优于(override)操作员输入命令135,从而将作业机器置于自动模式。
40.另选地,在白天暂停作业的情况下,当可移动结构105处于在距限定边界205的可允许距离215内时,操作员输入命令135可以优于位置控制算法195。
41.图6是随着作业机器100(如前所述)的行进而对该作业机器100的移动进行限制的方法600,其中,作业机器100包括行进主体110,该行进主体110具有联接在行进主体110上的可移动结构105。控制器180包括处理器185和存储器190,其中,处理器使用位置控制算法195来执行以下步骤。方法600包括:在第一步骤610中,处理器185接收边界命令200。在下一步骤620中,处理器185从传感器170接收感测信号175,其中,感测信号175包括与可移动结构105相对于地表125的移动相关的信息。步骤620可以在步骤610之后、同时或者之前发生。在步骤630中,处理器185然后可以确定可移动结构105相对于行进主体110的位置。在步骤640中,确定限定边界205。
42.最后,在步骤650中,处理器185根据步骤660、670以及680中的一个或更多个步骤来对移动进行限制。步骤650包括:对联接至行进主体110的地面接合机构120的移动进行限制。这可以包括改变履带速度以改变移动方向。步骤670包括:限制对动臂总成142进行控制的致动器(150、155、165)在移动包络214内的移动。步骤680包括:随着行进主体沿着行进路径的移动,相对于该可移动结构105针对行进主体110的角度取向(即,偏航角245),对可移动结构105的移动进行限制。当可移动结构105的位置处于距限定边界205的可允许距离215内时,这些步骤中的各个步骤皆发生,以防止可移动结构105移动超过限定边界205。当接收到感测信号175时,方法600可以包括以下步骤:对感测信号175进行处理,以从立体图像中
识别限定边界205。方法600可以包括以下步骤:在感测信号175进行连续更新的同时对感测信号175进行处理以识别移动物体。方法600还包括以下步骤:对感测信号175进行处理以从点云中识别限定边界。
43.在一个实施方式中,方法600的步骤690可以包括:接收用于致动行进主体110或可移动结构105的移动的操作员输入命令135;以及当可移动结构105处于距限定边界205的可允许距离215内时,超控操作员输入命令135。
44.在另一实施方式中,方法600的步骤695可以包括:接收用于致动行进主体110或可移动结构105的移动的操作员输入命令135;以及当可移动结构105处于距限定边界205的可允许距离215内时,超控移动限制。
45.现在转至图7,示出了作业机器100的动力系统700的图,以帮助避免边界限制710(图8所示)与所感测的物体720的干涉。动力系统700包括动力源730。动力转换系统740是由动力源730驱动的。地面接合机构120联接至动力转换系统750并从该动力转换系统750接收动力750。行进主体110联接至地面接合机构120,其中,地面接合机构120能够控制以使该行进主体110相对于地表125移动。可移动结构105联接至所述行进主体110,其中,该可移动结构105具有致动器755,该致动器755能够控制以使可移动结构105相对于行进主体110移动。致动器755联接至动力转换系统740并通过该动力转换系统接收动力750。致动器755可以包括动臂、动臂的一部分、或者可移动结构105的旋转组件。
46.用户输入部760生成用户输入信号765以控制地面接合机构120。该用户输入部760能够由作业机器的操作员从操作员室130或者远程地致动。
47.该定位传感器770能够操作以生成定位感测信号775。
48.与定位传感器770和用户输入部760进行通信的控制器180包括处理器185和存储器190,该存储器190上存储有位置控制算法195。处理器185能够操作以执行位置控制算法195,以接收用户输入信号765以及接收定位感测信号775。定位传感器信号770会包括用于创建边界限制710的与可移动结构105相对于行进主体110的移动相关的信息。边界限制710是随着行进主体110的移动而更新的。处理器185还确定可移动结构105相对于行进主体110的位置;以及响应地控制动力转换系统740,以控制地面接合机构120和致动器755中的一个或更多个,从而避免边界限制710与由物体检测传感器725感测到的物体720的干涉。
49.地面接合机构120可以包括左侧牵引总成780和右侧牵引总成785,该左侧牵引总成780和右侧牵引总成785可以以不同速度独立地移动,从而使得行进主体110能够转动。
50.处理器185可以随着行进主体110的移动而连续确定可移动结构105相对于该行进主体的位置。处理器185还可以随着行进主体110的移动而连续确定可移动结构105相对于所感测的物体720的位置。
51.现在参照图8,示出了作业机器的示意性俯视图,边界限制710包括竖直平面250,其中,竖直平面250是基于行进主体110和可移动结构105中的一个或更多个的最外侧点790来移位的。该竖直平面250可以处于或者接近地位于距最外侧点有足够净空的距离处,以避免在任何给定时刻与物体720干涉。
52.竖直平面250的移位可以包括通过同心圆(例如805a、805b、805c)来使竖直平面250移位。各个圆805a可以完全围绕作业机器100或者仅围绕作业机器的一部分805b(即,形成弧形),最靠近可移动结构105的最外侧点790的一部分。
53.在一个实施方式中,可移动结构105可以仅包括动臂总成142。
54.在另一实施方式中,可移动结构105可绕偏航轴线115旋转。
55.物体检测传感器725可以包括联接至作业机器100的立体成像设备265。位置控制算法195进一步对物体检测感测信号753进行处理,以从立体图像中识别物体720或物体720的存在。
56.物体检测传感器可以包括联接至作业机器100的lidar成像设备270,其中,位置控制算法195对物体检测感测信号753进行处理,以从根据lidar导出的点云275中识别物体720或物体的存在。
57.在半自主模式下,当边界限制710与物体720产生干涉或者预见与该物体产生干涉时,位置控制算法195可以优于用户输入信号765。在自主模式下,可以不存在用户输入信号765。然而,通过使用位置控制算法195,处理器185可以连续地重新评估可移动结构105、行进主体110以及附近物体720的相对位置。
58.现在转至图9,示出了随着作业机器100的行进而响应地控制动力转换系统740以限制该作业机器的移动的方法900。在步骤910中,控制器180(该控制器具有处理器185和存储器190,该存储器190上存储有位置控制算法195,其中,该处理器185能够操作以执行位置控制算法195)从能够由操作员致动的用户输入部760接收用户输入信号765,以对作业机器100的地面接合机构120进行控制。在步骤920中,控制器182从定位传感器770接收定位感测信号775。该定位感测信号775包括用于创建边界限制710的与可移动结构105相对于行进主体110的移动相关的信息。在步骤930中,边界限制710随着行进主体110的移动而持续更新。在步骤940中,控制器180确定可移动结构105相对于行进主体110的位置;以及响应地控制动力转换系统740,以控制地面接合机构120和动臂总成142的位置中的一个或更多个,从而避免边界限制710与从物体检测传感器725感测到的物体720的干涉。在步骤940中,当边界限制710与物体720产生干涉或者预见与该物体产生干涉时,控制器180超控用户输入信号765。
59.本文所使用的术语是用来描述特定的实施方式或实现的,并非旨在限制本公开。如本文所使用的,除非上下文另外明确指示,否则单数形式的描述旨在包括复数形式。还应理解,术语“具有(has、have、having)”、“包括(include、includes、including、comprise、comprises、comprising)”等在本说明书中的任何使用均标识存在规定的特征、要件、步骤、操作、要素和/或组件,而并非排除存在或增加一个或更多个其它的特征、要件、步骤、操作、要素、组件和/或这些的组合。
60.当描述设备的多个实现时,本文中与标号一起使用的引用“a”和“b”只是为了澄清。
61.本文所讨论的方法、处理或系统中的任一者的步骤或操作中的一个或更多个步骤或操作可以被省略、重复或重新排序,并且处于本公开的范围内。
62.虽然上面描述了本公开的示例实施方式,但是这些描述不应按限制性或限制意义来考虑。而相反,在不脱离所附权利要求的范围的情况下可以进行若干变化和修改。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1