一种翻斗扫地机垃圾箱自卸机构的制作方法
1.本实用新型涉及扫地机相关技术领域,尤其是指一种翻斗扫地机垃圾箱自卸机构。
背景技术:
2.扫地机是近几年新兴的智能清洁设备,其集扫地、吸尘等多种功能于一体,具有工作效率高、清洁成本低、清洁效果好和安全性能高等多种优点。
3.中国专利授权公告号:cn208965465u,授权公告日2019年06月11日,公开了一种带避震结构的扫地车包括底盘支架和位于底盘支架下方的转向轮组件,所述底盘支架下方固定有多个平行设置的横梁,所述横梁的下方设有固定板,所述固定板和横梁之间通过胶柱固定相连,固定板和横梁之间夹持固定有固定套管,所述固定套管内设置有可在固定套管内滑动的转向轴;所述转向轮组件包括转向轮、位于转向轮顶部的转向联轴器以及套设在转向联轴器外侧的轴承座,所述轴承座穿过所述固定板并与固定板固定相连,所述转向联轴器用于与转向轴相连。该专利的不足之处在于,扫地机在倒垃圾时无法根据不同高度的垃圾桶调整垃圾斗的高度,容易将垃圾倒出垃圾桶。
4.综上所述,目前需要一种能够实现适应各种高度垃圾桶的自动倾倒垃圾功能的翻斗扫地机垃圾箱自卸机构。
技术实现要素:
5.本实用新型是为了克服现有技术中扫地机在倒垃圾时无法根据不同高度的垃圾桶调整垃圾斗的高度,容易将垃圾倒出垃圾桶的不足,提供了一种能够实现适应各种高度垃圾桶的自动倾倒垃圾功能的翻斗扫地机垃圾箱自卸机构。
6.为了实现上述目的,本实用新型采用以下技术方案:
7.一种翻斗扫地机垃圾箱自卸机构,包括机身壳体和垃圾斗,所述垃圾斗的两侧均设有活动杆一和活动杆二,所述活动杆一的一端和垃圾斗铰接,所述机身壳体的顶部固定有支架,所述活动杆一的另一端和支架铰接,所述机身壳体上设有升降驱动机构,所述升降驱动机构上设有与活动杆一相匹配的推拉杆,所述推拉杆的端部安装在活动杆一的侧壁上且与其相铰接,所述活动杆二的一端和垃圾斗铰接,所述机身壳体上设有倾倒驱动机构,所述倾倒驱动机构上设有与活动杆二相匹配的摆杆,所述摆杆的端部和活动杆二的另一端相铰接。
8.在倒垃圾时,升降驱动机构通过推拉杆来推动活动杆一,此时活动杆一以支架为圆心作圆周运动,带动底部的垃圾斗上升(弧线上升)。之后倾倒驱动机构通过摆杆来摆动活动杆二,进而带动垃圾斗发生翻转(以活动杆一的一端为圆心),即可自动倾倒出里面的垃圾。其中升降驱动机构可以根据垃圾桶的高度来控制垃圾斗的上升高度,以实现适应各种高度垃圾桶的自动倾倒垃圾功能。
9.作为优选,所述升降驱动机构包括安装在机身壳体内部的升降油缸,所述机身壳
体上安装有拉杆轴,所述拉杆轴和机身壳体转动连接,所述升降油缸和拉杆轴之间设有传动臂一,所述传动臂一的一端和升降油缸的升降轴相铰接,所述传动臂一的另一端固定在拉杆轴的侧壁上,所述拉杆轴上设有与推拉杆相匹配的传动臂二,所述传动臂二的一端固定在拉杆轴的侧壁上,所述传动臂二的另一端和推拉杆的一端相铰接,所述推拉杆的另一端安装在活动杆一的侧壁上且与其相铰接。机身壳体的侧壁上设有推拉杆通孔,推拉杆的另一端穿过推拉杆通孔安装在活动杆一的侧壁上且与其相铰接。通过拉杆轴的设计,可以实现一个升降油缸控制两根活动杆一同步运动的目的。垃圾斗需要升起时,升降油缸上的升降轴顶出,通过传动臂一的传动,带动拉杆轴及其上的两根传动臂二发生转动,进而带动两根推拉杆运动,推动两根活动杆一,以实现垃圾斗的自动上升。其中升降油缸可以根据垃圾桶的高度来控制垃圾斗的上升高度,以实现适应各种高度垃圾桶的自动倾倒垃圾功能。结构简单,控制方便。
10.作为优选,所述升降驱动机构包括安装在机身壳体内部的减速机,所述减速机的转动轴上设有传动臂三,所述传动臂三和摆杆之间设有传动臂四,所述传动臂三的一端固定在减速机的转动轴的侧壁上,所述传动臂三的另一端和传动臂四的一端相铰接,所述传动臂四的另一端和摆杆的一端相铰接,所述摆杆的另一端和活动杆二的另一端相铰接。机身壳体的侧壁上设有摆杆通孔,摆杆的另一端穿过摆杆通孔与活动杆二的另一端相铰接。垃圾斗需要翻转时,减速机上的转动轴转动,通过传动臂三和传动臂四的传动,带动摆杆发生运动,进而摆动两根活动杆二,带动垃圾斗发生翻转,以实现自动倾倒出里面的垃圾。结构简单,控制方便。
11.作为优选,所述传动臂三和其中一根摆杆之间设有传动臂四,所述机身壳体上安装有摆杆轴,所述摆杆轴和机身壳体转动连接,所述摆杆的侧壁上设有摆杆轴安装孔,两根摆杆均通过摆杆轴安装孔安装在摆杆轴上且与其固定连接。通过摆杆轴的设计,可以实现一个减速机同时控制两根活动杆二同步运动的目的。
12.作为优选,所述机身壳体的底部设有与垃圾斗相匹配的垃圾斗槽。扫地机工作时,垃圾斗位于垃圾斗槽中且垃圾斗的开口正对扫把,一方面保证了扫地机结构的紧凑性,另一方面便于将垃圾扫向垃圾斗。
13.作为优选,所述机身壳体上设有与拉杆轴的两端相匹配的拉杆轴安装座,所述拉杆轴的两端分别安装在两个拉杆轴安装座上且与其转动连接。通过拉杆轴安装座的设计,方便拉杆轴安装在机身壳体上。
14.作为优选,所述机身壳体上还设有与摆杆轴的两端相匹配的摆杆轴安装座,所述摆杆轴的两端分别安装在两个摆杆轴安装座上且与其转动连接。通过摆杆轴安装座的设计,方便摆杆轴安装在机身壳体上。
15.本实用新型的有益效果是:实现了适应各种高度垃圾桶的自动倾倒垃圾功能;结构简单,控制方便;可以实现一个升降油缸控制两根活动杆一同步运动的目的;可以实现一个减速机同时控制两根活动杆二同步运动的目的;一方面保证了扫地机结构的紧凑性,另一方面便于将垃圾扫向垃圾斗;方便拉杆轴和摆杆轴安装在机身壳体上。
附图说明
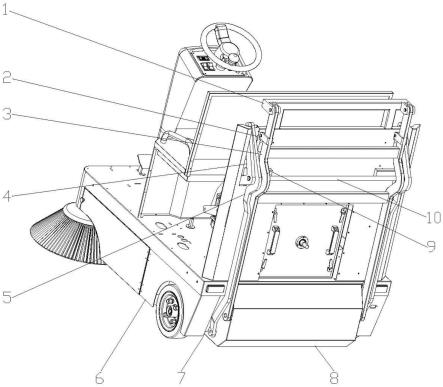
16.图1、图2和图3分别是本实用新型三种不同方向上的结构示意图。
17.图中:1. 支架,2. 推拉杆,3. 活动杆一,4. 摆杆,5. 活动杆二,6. 机身壳体,7. 垃圾斗槽,8. 垃圾斗,9. 摆杆轴安装座,10. 摆杆轴,11. 拉杆轴,12. 拉杆轴安装座,13. 传动臂一,14. 传动臂二,15. 升降油缸,16. 传动臂四,17. 传动臂三,18. 减速机。
具体实施方式
18.下面结合附图和具体实施方式对本实用新型做进一步的描述。
19.如图1、图2和图3所述的实施例中,一种翻斗扫地机垃圾箱自卸机构,包括机身壳体6和垃圾斗8,垃圾斗8的两侧均设有活动杆一3和活动杆二5,活动杆一3的一端和垃圾斗8铰接,机身壳体6的顶部固定有支架1,活动杆一3的另一端和支架1铰接,机身壳体6上设有升降驱动机构,升降驱动机构上设有与活动杆一3相匹配的推拉杆2,推拉杆2的端部安装在活动杆一3的侧壁上且与其相铰接,活动杆二5的一端和垃圾斗8铰接,机身壳体6上设有倾倒驱动机构,倾倒驱动机构上设有与活动杆二5相匹配的摆杆4,摆杆4的端部和活动杆二5的另一端相铰接。
20.升降驱动机构包括安装在机身壳体6内部的升降油缸15,机身壳体6上安装有拉杆轴11,拉杆轴11和机身壳体6转动连接,升降油缸15和拉杆轴11之间设有传动臂一13,传动臂一13的一端和升降油缸15的升降轴相铰接,传动臂一13的另一端固定在拉杆轴11的侧壁上,拉杆轴11上设有与推拉杆2相匹配的传动臂二14,传动臂二14的一端固定在拉杆轴11的侧壁上,传动臂二14的另一端和推拉杆2的一端相铰接,推拉杆2的另一端安装在活动杆一3的侧壁上且与其相铰接。
21.升降驱动机构包括安装在机身壳体6内部的减速机18,减速机18的转动轴上设有传动臂三17,传动臂三17和摆杆4之间设有传动臂四16,传动臂三17的一端固定在减速机18的转动轴的侧壁上,传动臂三17的另一端和传动臂四16的一端相铰接,传动臂四16的另一端和摆杆4的一端相铰接,摆杆4的另一端和活动杆二5的另一端相铰接。
22.传动臂三17和其中一根摆杆4之间设有传动臂四16,机身壳体6上安装有摆杆轴10,摆杆轴10和机身壳体6转动连接,摆杆4的侧壁上设有摆杆轴安装孔,两根摆杆4均通过摆杆轴安装孔安装在摆杆轴10上且与其固定连接。
23.机身壳体6的底部设有与垃圾斗8相匹配的垃圾斗槽7。
24.机身壳体6上设有与拉杆轴11的两端相匹配的拉杆轴安装座12,拉杆轴11的两端分别安装在两个拉杆轴安装座12上且与其转动连接。
25.机身壳体6上还设有与摆杆轴10的两端相匹配的摆杆轴安装座9,摆杆轴10的两端分别安装在两个摆杆轴安装座9上且与其转动连接。
26.工作原理:在倒垃圾时,升降油缸15上的升降轴顶出(升降油缸15可以根据垃圾桶的高度来控制升降轴的顶出长度),通过传动臂一13的传动,带动拉杆轴11及其上的两根传动臂二14发生转动,进而带动两根推拉杆2同步运动,同时推动两根活动杆一3,此时活动杆一3以支架1为圆心作圆周运动,带动底部的垃圾斗8上升(弧线上升);之后减速机18上的转动轴转动,通过传动臂三17和传动臂四16的传动,带动其中一根摆杆4发生运动,并通过摆杆轴10的传动来实现另一根摆杆4的同步运动,进而同步摆动两根活动杆二5,带动垃圾斗8发生翻转(以活动杆一3的一端为圆心),以实现自动倾倒出里面的垃圾。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1