一种工业机器人安全防护系统的制作方法
1.本发明涉及工业机器人领域,尤其涉及一种工业机器人安全防护系统。
背景技术:
2.工业机器人是广泛用于工业领域的多关节机械手或多自由度的机器装置,具有一定的自动性,可依靠自身的动力能源和控制能力实现各种工业加工制造功能。工业机器人被广泛应用于电子、物流、化工等各个工业领域之中。
3.从机械结构来看,工业机器人总体上分为串联机器人和并联机器人。串联机器人的特点是一个轴的运动会改变另一个轴的坐标原点,而并联机器人一个轴运动则不会改变另一个轴的坐标原点。早期的工业机器人都是采用串联机构。并联机构定义为动平台和定平台通过至少两个独立的运动链相连接,机构具有两个或两个以上自由度,且以并联方式驱动的一种闭环机构。并联机构有两个构成部分,分别是手腕和手臂。手臂活动区域对活动空间有很大的影响,而手腕是工具和主体的连接部分。与串联机器人相比较,并联机器人具有刚度大、结构稳定、承载能力大、微动精度高、运动负荷小的优点。在位置求解上,串联机器人的正解容易,但反解十分困难;而并联机器人则相反,其正解困难,反解却非常容易。
4.驱动系统是向机械结构系统提供动力的装置。根据动力源不同,驱动系统的传动方式分为液压式、气压式、电气式和机械式4种。早期的工业机器人采用液压驱动。由于液压系统存在泄露、噪声和低速不稳定等问题,并且功率单元笨重和昂贵,目前只有大型重载机器人、并联加工机器人和一些特殊应用场合使用液压驱动的工业机器人。气压驱动具有速度快、系统结构简单、维修方便、价格低等优点。但是气压装置的工作压强低,不易精确定位,一般仅用于工业机器人末端执行器的驱动。气动手抓、旋转气缸和气动吸盘作为末端执行器可用于中、小负荷的工件抓取和装配。电力驱动是目前使用最多的一种驱动方式,其特点是电源取用方便,响应快,驱动力大,信号检测、传递、处理方便,并可以采用多种灵活的控制方式。
5.控制系统的任务是根据机器人的作业指令以及从传感器反馈回来的信号,支配机器人的执行机构去完成规定的运动和功能。如果机器人不具备信息反馈特征,则为开环控制系统;具备信息反馈特征,则为闭环控制系统。根据控制原理可分为程序控制系统、适应性控制系统和人工智能控制系统。根据控制运动的形式可分为点位控制和连续轨迹控制。
6.相比于传统的工业设备,工业机器人有众多的优势,比如机器人具有易用性、智能化水平高、生产效率及安全性高、易于管理且经济效益显著等特点,使得它们可以在高危环境下进行作业,但是,在现有技术中工业机器人容易在作业过程中因碰撞而损坏,对此,现有技术中往往采用激光测距的方式进行障碍物的识别,但是激光测距的测试点较小,若要形成面的计算则需要设置多个激光测距,或者使用图像识别的方式,但图像识别往往需要图像处理,其处理速度较慢。
技术实现要素:
7.因此,为了克服上述问题,本发明提供一种工业机器人安全防护系统包括图像传感器、图像处理器、光感测装置、气体浓度感测器、信号处理器、第一比较器、第二比较器、第三比较器、中央控制装置、气体发生装置以及工业机器人控制器。
8.其中,所述图像传感器、所述图像处理器、所述第一比较器依次连接,所述光感测装置与所述第二比较器连接,所述气体浓度感测器、所述信号处理器、所述第三比较器依次连接,所述第一比较器、所述第二比较器以及所述第三比较器均与所述中央控制装置连接,所述中央控制装置与所述气体发生装置连接,所述中央控制装置与所述工业机器人控制器连接。
9.所述图像传感器设置于所述工业机器人的前端,所述图像传感器实时采集所述工业机器人前端的图像信息,所述光感测装置设置于所述工业机器人的前端,所述光感测装置实时采集所述工业机器人前端的光强度信号,所述气体浓度感测器设置于所述工业机器人的前端,所述气体浓度感测器实时采集所述工业机器人前端的气体浓度信号;所述气体发生装置设置于所述工业机器人的前端,在所述工业机器人行进时喷射带有颜色的氧气气体,喷射气体为柱状形喷出,所述图像传感器将所述气体发生装置喷射后第一采样点的图像和喷射后第二采样点的图像均传输至所述图像处理器,所述图像处理器将接收到的两个图像划分为若干个相同区域,并计算每个区域的灰度值,所述图像处理器将所述气体发生装置喷射后第一采样点的图像的若干个区域的灰度值和所述气体发生装置喷射后的第二采样点的图像的若干个区域的灰度值传输至所述第一比较器,所述第一比较器将两幅图像对应区域的灰度值进行比较,若述气体发生装置喷射后第二采样点的图像的若干个区域的灰度值中大于所述气体发生装置喷射后的第一采样点的图像的若干个区域的灰度值的区域个数大于第一预设阈值,则所述第一比较器发出第一预警信号;同时,所述光感测装置将所述气体发生装置喷射后第一采样点的光强度信号和喷射后的第二采样点的光强度信号均传输至所述第二比较器,若所述气体发生装置喷射后的第一采样点的光强度信号和喷射后第二采样点的光强度信号的差的绝对值大于第二预设阈值,则所述第二比较器发出第二预警信号;同时,所述气体浓度感测器将所述气体发生装置喷射后第一采样点的氧气浓度信号和喷射后的第二采样点的氧气浓度信号均传输至所述第三比较器,若所述气体发生装置喷射后第一采样点的氧气浓度信号和喷射后的第二采样点的氧气浓度信号的差的绝对值大于第三预设阈值,则所述第三比较器发出第三预警信号;所述中央控制装置若接收到第一预警信号、第二预警信号以及第三预警信号,则所述中央控制装置通过所述工业机器人控制器控制所述工业机器人停止作业。
10.具体地,所述气体发生装置内包括一气压存储装置,所述气压存储装置用于在所述气体发生装置接收到气体喷射指令后将所述气体发生装置内待喷射气体以柱状喷射出。
11.具体地,光感测装置包括第一场效应管t1、第二场效应管t2、第三场效应管t3以及光二极管d。
12.其中,所述光二极管d用于感测光信号,所述光二极管d的正极接地,所述光二极管d的阴极与所述第一场效应管t1的源极连接,所述光二极管d的阴极与所述第二场效应管t2的栅极连接,所述第一场效应管t1的栅极与所述第一场效应管t1的漏极连接,所述第一场效应管t1的漏极与电源vdd连接,所述第二场效应管t2的漏极也与电源vdd连接,所述第二
场效应管t2的源极与所述第三场效应管t3的漏极连接,所述第三场效应管t3的栅极与电源vrow连接,所述第三场效应管t3的源极与所述第二比较器连接。
13.具体地,所述信号处理器包括第一电阻、第二电阻、第三电阻、第四电阻、第五电阻、第六电阻、第七电阻、第八电阻、第一电容、第二电容、第三电容、第四电容、第一集成运放以及第二集成运放。
14.其中,所述气体浓度感测器的输出端与所述第一电容的第一端连接,所述第一电容的第二端与所述第二电容的第一端连接,所述第一电容的第二端还与所述第一电阻的第一端连接,所述第一电阻的第二端与所述第一集成运放的输出端连接,所述第二电容的第二端与所述第一集成运放的同相输入端连接,所述第二电阻的第一端接地,所述第二电阻的第二端与所述第二电容的第二端连接,所述第三电阻的第一端接地,所述第三电阻的第二端与所述第一集成运放的反相输入端连接,所述第四电阻的第一端与所述第三电阻的第二端连接,所述第四电阻的第二端与所述第一集成运放的输出端连接;所述第一集成运放的输出端与所述所述第三电容的第一端连接,所述第三电容的第二端与所述第四电容的第一端连接,所述第三电容的第二端还与所述第五电阻的第一端连接,所述第五电阻的第二端与所述第二集成运放的输出端连接,所述第四电容的第二端与所述第二集成运放的同相输入端连接,所述第六电阻的第一端接地,所述第六电阻的第二端与所述第四电容的第二端连接,所述第七电阻的第一端接地,所述第七电阻的第二端与所述第二集成运放的反相输入端连接,所述第八电阻的第一端与所述第七电阻的第二端连接,所述第八电阻的第二端与所述第二集成运放的输出端连接,所述第二集成运放的输出端与所述第三比较器的输入端连接;其中,所述第一电容、所述第二电容、所述第三电容、所述第四电容的电容值相等。
15.与现有技术相比,本发明具有如下的有益效果:本发明提供的工业机器人安全防护系统包括图像传感器、图像处理器、光感测装置、气体浓度感测器、信号处理器、第一比较器、第二比较器、第三比较器、中央控制装置、气体发生装置以及工业机器人控制器,其主要采用喷射带有颜色的气体的方法对工业机器人前方障碍进行判断,使用图像传感器、图像处理器以及第一比较器对气体撞击到障碍物而发生散溅进行判断,在此无需对采集的图像进行图像清晰度处理,只需要将在喷射气体后的两个采样点的图像进行区域划分,然后对比对应区域的灰度值即能知晓气体是否撞击到障碍物而发生散溅,大大提高了检测的效率,还使用光感测装置、气体浓度感测器对气体撞击到障碍物而发生散溅进行判断,设计了相应的检测电路,大大提高了检测精度。
16.因此,本发明提供的工业机器人安全防护系统能够实现对工业机器人运行前方的障碍物进行有效判断,相较于现有技术中使用激光测距的方法,具有测试范围更光的优势,对于图像采集的方法,无需对图像中障碍物进行识别,具有测试效率更高的优势。
附图说明
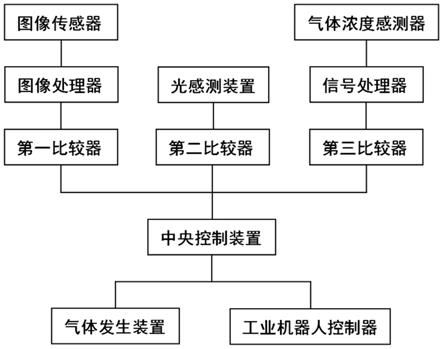
17.图1为本发明的工业机器人安全防护系统的示意图;图2为本发明的光感测装置的示意图;图3为本发明的信号处理器的示意图。
具体实施方式
18.下面结合附图和实施例对本发明提供的工业机器人安全防护系统进行详细说明。
19.如图1所示,本发明提供的工业机器人安全防护系统包括图像传感器、图像处理器、光感测装置、气体浓度感测器、信号处理器、第一比较器、第二比较器、第三比较器、中央控制装置、气体发生装置以及工业机器人控制器。
20.其中,所述图像传感器、所述图像处理器、所述第一比较器依次连接,所述光感测装置与所述第二比较器连接,所述气体浓度感测器、所述信号处理器、所述第三比较器依次连接,所述第一比较器、所述第二比较器以及所述第三比较器均与所述中央控制装置连接,所述中央控制装置与所述气体发生装置连接,所述中央控制装置与所述工业机器人控制器连接。
21.所述图像传感器设置于所述工业机器人的前端,所述图像传感器实时采集所述工业机器人前端的图像信息,所述光感测装置设置于所述工业机器人的前端,所述光感测装置实时采集所述工业机器人前端的光强度信号,所述气体浓度感测器设置于所述工业机器人的前端,所述气体浓度感测器实时采集所述工业机器人前端的气体浓度信号;所述气体发生装置设置于所述工业机器人的前端,在所述工业机器人行进时喷射带有颜色的氧气气体,喷射气体为柱状形喷出,所述图像传感器将所述气体发生装置喷射后第一采样点的图像和喷射后第二采样点的图像均传输至所述图像处理器,所述图像处理器将接收到的两个图像划分为若干个相同区域,并计算每个区域的灰度值,所述图像处理器将所述气体发生装置喷射后第一采样点的图像的若干个区域的灰度值和所述气体发生装置喷射后的第二采样点的图像的若干个区域的灰度值传输至所述第一比较器,所述第一比较器将两幅图像对应区域的灰度值进行比较,若述气体发生装置喷射后第二采样点的图像的若干个区域的灰度值中大于所述气体发生装置喷射后的第一采样点的图像的若干个区域的灰度值的区域个数大于第一预设阈值,则所述第一比较器发出第一预警信号;同时,所述光感测装置将所述气体发生装置喷射后第一采样点的光强度信号和喷射后的第二采样点的光强度信号均传输至所述第二比较器,若所述气体发生装置喷射后的第一采样点的光强度信号和喷射后第二采样点的光强度信号的差的绝对值大于第二预设阈值,则所述第二比较器发出第二预警信号;同时,所述气体浓度感测器将所述气体发生装置喷射后第一采样点的氧气浓度信号和喷射后的第二采样点的氧气浓度信号均传输至所述第三比较器,若所述气体发生装置喷射后第一采样点的氧气浓度信号和喷射后的第二采样点的氧气浓度信号的差的绝对值大于第三预设阈值,则所述第三比较器发出第三预警信号;所述中央控制装置若接收到第一预警信号、第二预警信号以及第三预警信号,则所述中央控制装置通过所述工业机器人控制器控制所述工业机器人停止作业。
22.上述实施方式中,本发明提供的工业机器人安全防护系统包括图像传感器、图像处理器、光感测装置、气体浓度感测器、信号处理器、第一比较器、第二比较器、第三比较器、中央控制装置、气体发生装置以及工业机器人控制器,其主要采用喷射带有颜色的气体的方法对工业机器人前方障碍进行判断。更进一步地,本发明提供的工业机器人安全防护系统使用图像传感器、图像处理器以及第一比较器对气体撞击到障碍物而发生散溅进行判断,在此无需对采集的图像进行图像清晰度处理,只需要将在喷射气体后的两个采样点的图像进行区域划分,然后对比对
应区域的灰度值即能知晓气体是否撞击到障碍物而发生散溅,大大提高了检测的效率。
23.更进一步地,本发明提供的工业机器人安全防护系统还使用光感测装置、气体浓度感测器对气体撞击到障碍物而发生散溅进行判断,设计了相应的检测电路,大大提高了检测精度。
24.因此,本发明提供的工业机器人安全防护系统能够实现对工业机器人运行前方的障碍物进行有效判断,相较于现有技术中使用激光测距的方法,具有测试范围更光的优势,对于图像采集的方法,无需对图像中障碍物进行识别,具有测试效率更高的优势。
25.进一步地,所述气体发生装置内包括一气压存储装置,所述气压存储装置用于在所述气体发生装置接收到气体喷射指令后将所述气体发生装置内待喷射气体以柱状喷射出。
26.如图2所示,光感测装置包括第一场效应管t1、第二场效应管t2、第三场效应管t3以及光二极管d。
27.其中,所述光二极管d用于感测光信号,所述光二极管d的正极接地,所述光二极管d的阴极与所述第一场效应管t1的源极连接,所述光二极管d的阴极与所述第二场效应管t2的栅极连接,所述第一场效应管t1的栅极与所述第一场效应管t1的漏极连接,所述第一场效应管t1的漏极与电源vdd连接,所述第二场效应管t2的漏极也与电源vdd连接,所述第二场效应管t2的源极与所述第三场效应管t3的漏极连接,所述第三场效应管t3的栅极与电源vrow连接,所述第三场效应管t3的源极与所述第二比较器连接。
28.上述实施方式中,第一场效应管t1、第二场效应管t2、第三场效应管t3均为nmos晶体管。
29.进一步地,上述光感测装置主要由nmos晶体管t1、t2、t3以及光二极管d所组成,光感测装置是利用nmos晶体管t1的漏极直接接到电压vdd,此时nmos晶体管t1的漏极与源极之间的电压差与nmos晶体管t1的栅极的电流形成对数关系,因此使得输出电压vout与光二极管d接收的光强度也形成对数关系。
30.进一步地,本发明提供的光感测装置具有很高的动态范围,即对光信号的感测灵敏。
31.如图3所示,所述信号处理器包括第一电阻、第二电阻、第三电阻、第四电阻、第五电阻、第六电阻、第七电阻、第八电阻、第一电容、第二电容、第三电容、第四电容、第一集成运放以及第二集成运放。
32.其中,所述气体浓度感测器的输出端与所述第一电容的第一端连接,所述第一电容的第二端与所述第二电容的第一端连接,所述第一电容的第二端还与所述第一电阻的第一端连接,所述第一电阻的第二端与所述第一集成运放的输出端连接,所述第二电容的第二端与所述第一集成运放的同相输入端连接,所述第二电阻的第一端接地,所述第二电阻的第二端与所述第二电容的第二端连接,所述第三电阻的第一端接地,所述第三电阻的第二端与所述第一集成运放的反相输入端连接,所述第四电阻的第一端与所述第三电阻的第二端连接,所述第四电阻的第二端与所述第一集成运放的输出端连接;所述第一集成运放的输出端与所述所述第三电容的第一端连接,所述第三电容的第二端与所述第四电容的第一端连接,所述第三电容的第二端还与所述第五电阻的第一端连接,所述第五电阻的第二端与所述第二集成运放的输出端连接,所述第四电容的第二端与所述第二集成运放的同相
输入端连接,所述第六电阻的第一端接地,所述第六电阻的第二端与所述第四电容的第二端连接,所述第七电阻的第一端接地,所述第七电阻的第二端与所述第二集成运放的反相输入端连接,所述第八电阻的第一端与所述第七电阻的第二端连接,所述第八电阻的第二端与所述第二集成运放的输出端连接,所述第二集成运放的输出端与所述第三比较器的输入端连接。
33.其中,所述第一电容、所述第二电容、所述第三电容、所述第四电容的电容值相等。
34.上述实施方式中,所述第一电容、所述第二电容、所述第三电容、所述第四电容的电容值均为0.001μf,所述第一电阻的阻值为200kω,所述第二电阻的阻值为130kω,所述第三电阻的阻值为200kω,所述第四电阻的阻值为430kω,所述第五电阻的阻值为240kω,所述第六电阻的阻值为100kω,所述第七电阻的阻值为200kω,所述第八电阻的阻值为430kω。
35.最后所应说明的是,以上实施例仅用以说明本发明的技术方案而非限制。尽管参照实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,对本发明的技术方案进行修改或者等同替换,都不脱离本发明技术方案的精神和范围,其均应涵盖在本发明的权利要求范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1