建筑模具安装机器人的制作方法
[0001]
本实用新型涉及建筑模具安装技术领域,尤其涉及一种可自动化安装模具的建筑模具安装机器人。
背景技术:
[0002]
建筑模具是一种临时性支护结构,按设计要求制作,使混凝土结构、构件按规定的位置、几何尺寸成形,保持其正确位置,并承受建筑模具自重及作用在其上的外部荷载。进行模具工程的目的,是保证混凝土工程质量与施工安全、加快施工进度和降低工程成本。现浇混凝土结构工程施工用的建筑模具安装,一般采用人工安装,由于人力资源逐渐紧张,这会带来比较高的人工成本,而且安装效率比较低,特别是施工场地环境调节比较恶劣(如高温)时,不得不停止工作。
技术实现要素:
[0003]
本实用新型的目的是为解决上述技术问题而提供一种可自动化安装模具的建筑模具安装机器人。
[0004]
为了实现上述目的,本实用新型公开了一种建筑模具安装机器人,其包括一基台,所述基台上设置有行走机构、定位机构、机械臂、转动机构和调整机构;
[0005]
所述行走机构,用于带动所述基台在支撑面上行走;
[0006]
所述定位机构,包括安装在所述基台上的至少两螺杆式直线步进电机,所述基台上开设有供所述直线步进电机的螺杆进出的通孔,所述直线步进电机可带动螺杆上下运动,以与预埋在所述基台下方的支撑面上的螺母连接或分离;
[0007]
所述机械臂,包括前端和后端,所述后端安装在所述转动机构上,所述前端可相对所述后端做俯仰运动,所述转动机构用于带动所述机械臂做圆周转动;所述前端还设置有用于抓取模具的抓手;
[0008]
所述调整机构,安装在所述机械臂的前端,并与所述抓手连接,用于调整所述抓手抓取到的所述模具的姿态。
[0009]
与现有技术相比,本实用新型建筑模具安装机器人,包括有一可自由行走的基台,基台上设置有定位机构、机械臂、转动机构和调整机构;当基台行走至支撑面上预埋螺母位置时,定位机构中的直线步进电机转动,使得螺杆旋转式地向下运动,与下方的螺母咬合在一起,从而完成基台的自定定位;然后,通过机械臂前端的抓手抓取模具,同时通过调整机构调整所抓取到的模具的姿态,然后通过调整机械臂的俯仰角和转动角度讲模具放置在目标位置;由此可知,采用上述机器人,在建筑施工场地,可代替人工完成模具的抓取、姿态调整和放置工作,从而高效地自动完成模具的安装工作,工作效率高,节省人工成本。
[0010]
较佳地,所述模具上设置有用于检测其姿态的姿态传感器,所述基台上设置有分别与所述姿态传感器和所述调整机构电性连接的控制器。
[0011]
较佳地,所述姿态传感器为陀螺仪或平衡仪。
[0012]
较佳地,所述调整机构包括与所述控制器电性连接的第一驱动电机,所述第一驱动电机用于带动所述抓手转动,以调节所述抓手上的所述模具的俯仰角。
[0013]
较佳地,所述螺杆内设置有用于检测预埋螺母的定位传感器,所述定位传感器与所述控制器电性连接。
[0014]
较佳地,所述定位传感器为干簧管,所述螺母上设置有与所述干簧管相适配的永磁铁。
[0015]
较佳地,所述抓手为永磁起重器。
[0016]
较佳地,所述转动机构包括安装在所述基台上的转盘和带动所述转盘转动的第二驱动电机,所述第二驱动电机与所述控制器电性连接,所述机械臂的后端安装在所述转盘上。
[0017]
较佳地,所述行走机构包括安装在所述基台底部的车轮和带动所述车轮行走的电动机构,所述电动机构与所述控制器电性连接。
附图说明
[0018]
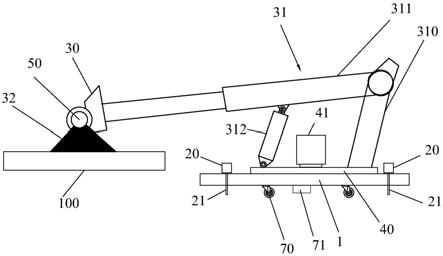
图1为本实用新型实施例建筑模具安装机器人的平面结构示意图。
[0019]
图2为本实用新型实施例建筑模具安装机器人的控制原理示意图。
具体实施方式
[0020]
为详细说明本实用新型的技术内容、构造特征、所实现目的及效果,以下结合实施方式并配合附图详予说明。
[0021]
如图1所示,本实用新型公开一种建筑模具安装机器人,包括一基台1,基台1上设置有行走机构、定位机构、机械臂、转动机构和调整机构。
[0022]
行走机构,用于带动基台1在支撑面(施工地面)上自由行走。
[0023]
定位机构,包括安装在基台1上的至少两螺杆21式直线步进电机20,基台1上开设有供直线步进电机20的螺杆21进出的通孔,借助于该通孔,直线步进电机20可带动螺杆21上下运动,以与预埋在基台1下方的支撑面上的螺母连接或分离。当基台1行走至基台1上的螺杆21与支撑面上的螺母相对时,直线步进电机20转动,使得螺杆21通过通孔旋转地下移,从而与下方的螺母螺接在一起,进而完成基台1的定位,以避免模具100安装过程中基台1的位移发生变化,影响安装精度。
[0024]
机械臂,包括前端30和后端31,后端31安装在转动机构上,前端30可相对后端31做俯仰运动,转动机构用于带动机械臂做圆周转动。前端30还设置有用于抓取模具100的抓手32。本实施例中,机械臂的后端31包括支撑臂310、大臂311和液压缸312,大支撑臂310固定在转动机构上,大臂311与支撑臂310枢转连接,机械臂的前端30与大臂311通过伸缩结构连接,液压缸312的一端安装在转动机构上,液压缸312的另一端与大臂311连接,通过该液压缸312控制大臂311的俯仰运动。
[0025]
调整机构,安装在机械臂的前端30,并与抓手32连接,用于调整抓手32抓取到的模具100的姿态,以使得模具100的主轴线位于水平或竖直状态。为方便调整机构的动作,较佳地,请结合参阅图2,模具100上设置有用于检测其姿态的姿态传感器61,基台1上设置有分别与姿态传感器61和调整机构电性连接的控制器60。控制器60通过姿态传感器61检测模具
100当前的姿态,然后与预设的标准姿态比对,从而得出调整量,然后根据该调整量控制调整机构的动作,以对抓手32的当前位置进行调整,从而达到调整模具100姿态的目的。本实施例中,姿态传感器61优选为陀螺仪或平衡仪。
[0026]
进一步地,调整机构包括与控制器60电性连接的第一驱动电机50,第一驱动电机50用于带动抓手32转动,以调节抓手32上的模具100的俯仰角,从而使得模具100以所需姿态安装在目标位置。
[0027]
进一步地,螺杆21内设置有用于检测预埋螺母的定位传感器62,定位传感器62与控制器60电性连接。通过该定位传感器62,可实现螺杆21与螺母的自动定位。较佳地,定位传感器62为干簧管,螺母上设置有与干簧管相适配的永磁铁。
[0028]
为方便抓取模具100,并尽可能减少抓取过程中对模具100的伤害,上述实施例中的抓手32优选为永磁起重器,当然,所适用的模具100也为磁性材料所制。
[0029]
进一步地,转动机构包括安装在基台1上的转盘40和带动转盘40转动的第二驱动电机41,第二驱动电机41与控制器60电性连接,机械臂的后端31安装在转盘40上。
[0030]
另外,行走机构优选为包括安装在基台1底部的车轮70和带动车轮70行走的电动机构71,该电动机构71与控制器60电性连接,以方便对基台1位置的起停进行控制。
[0031]
综上,如图1和图2,使用具有上述结构的机器人进行模具100安装时,首先,控制器60通过电动机构71控制基台1在施工场地行走,当基台1上的螺杆21与预埋的螺母正相对时,螺杆21中的干簧管的状态发生变化,控制器60根据这种变化控制直线步进电机20转动,使得螺杆21通过基台1上的通孔下移并与螺母螺接在一起,完成基台1的定位;然后,机械臂的前端30下移,通过永磁起重器将模具100吸附起来,接着,根据陀螺仪向控制器60的反馈,控制器60控制第一驱动电机50动作,完成对模具100姿态的调整,然后,通过第二驱动电机41带动转盘40转动,调整模具100安放的横向位移,从而将模具100放置在目标位置。由此,采用上述机器人,在建筑施工场地,可代替人工完成模具100的抓取、姿态调整和放置工作,从而高效地自动完成模具100的安装工作,工作效率高,节省人工成本。
[0032]
以上所揭露的仅为本实用新型的优选实施例而已,当然不能以此来限定本实用新型之权利范围,因此依本实用新型申请专利范围所作的等同变化,仍属本实用新型所涵盖的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1