一种模块化的巡检机器人的制作方法
[0001]
本实用新型主要涉及巡检机器人技术领域,特指一种模块化的巡检机器人。
背景技术:
[0002]
随着经济的发展及技术的进步,目前在电力线路巡检、城市地下综合管廊巡检、输煤栈桥巡检等需要定期安排人力去对现场设备运行情况、现场环境进行监测的领域越来越多的引入了自动巡检机器人,市场上相关做巡检设备的企业也如雨后春笋般的出现。但从目前市场产品来看,大多数挂轨式巡检机器人制造商针对不同的场景有定制开发不同的产品;其中粉尘浓度比较大、环境比较恶劣,必须带清扫机构,净空高度比较充足的作为一类;粉尘浓度比较大、环境比较恶劣,必须带清扫机构,净空高度不是很充足的作为一类;粉尘浓度很低、环境比较良好的,无需带清扫机构,但净空高度比较充足的作为一类;粉尘浓度很低、环境比较良好,无需带清扫机构,净空高度不是很充足的作为一类;不同的应用场景无形增加了产品开发的难度,消耗了大量的人力物力,开发和制造成本高;同时通用化程度非常差,造成产品种类、型号繁多,不便于公司进行管理,市场进行推广。
技术实现要素:
[0003]
本实用新型要解决的技术问题就在于:针对现有技术存在的技术问题,本实用新型提供一种适用性强的模块化的巡检机器人。
[0004]
为解决上述技术问题,本实用新型提出的技术方案为:
[0005]
一种模块化的巡检机器人,包括机器人本体、清扫机构和云镜系统,所述清扫机构与所述机器人本体相连,所述云镜系统安装于所述机器人本体或者清扫机构上。
[0006]
作为上述技术方案的进一步改进:
[0007]
所述云镜系统通过螺栓挂载于所述机器人本体或者清扫机构上。
[0008]
所述云镜系统挂载于所述机器人本体或者清扫机构的下方。
[0009]
所述清扫机构与所述机器人本体之间通过连接组件进行连接。
[0010]
所述连接组件包括第一连接杆、第二连接杆和万向接头,所述第一连接杆的一端与所述清扫机构相连,另一端与所述万向接头的一端相连,所述第二连接杆的一端与所述万向接头的另一端相连,另一端设有卡槽,所述卡槽卡设于所述机器人本体上且通过螺钉进行紧固。
[0011]
所述机器人本体为挂轨式机器人。
[0012]
所述云镜系统包括安装架、摄像机和红外热像仪,所述安装架安装于所述机器人本体或者清扫机构上,所述摄像机和红外热像仪安装于所述安装架上。
[0013]
所述清扫机构包括安装座、防偏转组件和毛刷组件;所述防偏转组件包括上夹持单元和下夹持单元,所述上夹持单元和下夹持单元相互配合,用于弹性夹持待清理轨道的底边以防止偏转;所述毛刷组件包括安装块和一个以上的毛刷单元,所述毛刷单元安装于所述安装块上,所述安装块安装于安装座上。
[0014]
所述毛刷单元包括毛刷和导向轮,所述导向轮转动安装在安装块的上端,所述毛刷安装在安装块的下端。
[0015]
所述上夹持单元包括行走轮,所述行走轮安装于所述安装块的上端;所述下夹持单元包括随动轮,所述随动轮安装于所述安装块的下端。
[0016]
与现有技术相比,本实用新型的优点在于:
[0017]
本实用新型的模块化的巡检机器人,通过清扫机构对轨道进行清扫,从而实现轨道的自动清扫,并通过云镜系统对现场进行拍摄,并将拍摄数据发送对远程终端,实现电力设备的自动巡检;上述机器人适用于输煤栈桥、城市综合管廊、大型超市及商场等场景,无论空间空旷还是狭窄,均可适用;机器人本体、清扫机构以及云镜系统三大部件模块化生产,大大节约成本,针对不同环境及场景进行搭配组装,安装方便便捷。
[0018]
本实用新型的模块化的巡检机器人,清扫机构为与机器人本体相独立的模块,且拆装方便;而且清扫机构借助机器人本体的动力沿轨道运行,无需单独配置额外动力;清扫机构与机器人本体之间通过万向接头柔性连接,可随机器人本体进行柔性偏转,不会对机器人本体造成卡滞、挤压和冲击,运行顺畅。清扫机构采用防偏转组件,能够保证整体结构在轨道上不会侧翻等,保证其运行的可靠性;防偏转组件采用上下夹持的方式,结构简单、运行稳定。采用毛刷组件,结构简单且易于实现,能够清理干净轨道。
附图说明
[0019]
图1为本实用新型在实施例一的立体结构示意图。
[0020]
图2为本实用新型在实施例一的爆炸结构示意图。
[0021]
图3为本实用新型在实施例一的主视结构示意图。
[0022]
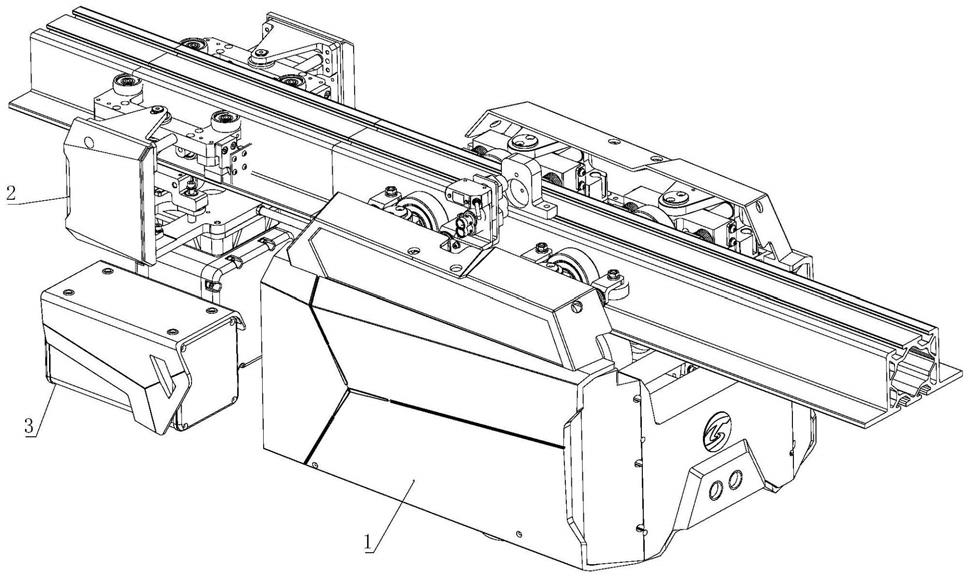
图4为本实用新型在实施例二的立体结构示意图。
[0023]
图5为本实用新型在实施例二的主视结构示意图。
[0024]
图6为本实用新型在实施例二的爆炸结构示意图。
[0025]
图7为本实用新型在实施例二的侧视结构示意图。
[0026]
图8为本实用新型在实施例三的侧视结构示意图。
[0027]
图中标号表示:1、机器人本体;2、清扫机构;21、安装座;22、防偏转组件;221、上夹持单元;222、下夹持单元;23、毛刷组件;231、安装块;232、毛刷单元;2321、毛刷;2322、导向轮;3、云镜系统;31、安装架;32、摄像机;33、螺栓;34、红外热像仪;4、连接组件;41、第一连接杆;42、万向接头;43、第二连接杆;431、卡槽;432、螺钉。
具体实施方式
[0028]
以下结合说明书附图和具体实施例对本实用新型作进一步描述。
[0029]
实施例一:
[0030]
如图1至图3所示,本实施例的模块化的巡检机器人,包括机器人本体1、清扫机构2和云镜系统3,清扫机构2与机器人本体1相连,云镜系统3安装于清扫机构2上。其中机器人本体1采用常规的挂轨式机器人,挂载在轨道上并在轨道上滑动,其中清扫机构2则同样挂载在轨道上,并在挂轨式机器人的牵引下同步在轨道上滑动清灰,云镜系统3则同步移动并对现场设备进行拍摄记录存储,并可以进行同步显示。本实施例的模块化的巡检机器人,通
过清扫机构2对轨道进行清扫,从而实现轨道的自动清扫;并通过云镜系统3对现场进行拍摄,并将拍摄数据发送对远程终端,实现电力设备的自动巡检;本实施例适用于类似输煤栈桥等这种环境恶劣,空间很狭窄的场景。
[0031]
如图3所示,本实施例中,云镜系统3通过螺栓33挂载于清扫机构2的下方。具体地,云镜系统3包括四方形的安装架31、高清摄像机32和红外热像仪34,安装架31的顶部则通过四个螺栓33安装于清扫机构2上,高清摄像机32和红外热像仪34则分别位于安装架31的两侧。当然,在具体实施例中,上述摄像机32和红外热像仪34的数量可以根据现场需求进行确认。
[0032]
如图3和图7所示,本实施例中,清扫机构2与机器人本体1之间通过连接组件4进行连接。具体地,连接组件4包括第一连接杆41、第二连接杆43和万向接头42,第一连接杆41的一端与清扫机构2相连,另一端与万向接头42的一端相连,第二连接杆43的一端与万向接头42的另一端相连,另一端设有卡槽431,卡槽431卡设于机器人本体1上且通过螺钉432进行紧固。清扫机构2为与机器人本体1相独立的模块,且拆装方便;而且清扫机构2借助机器人本体1的动力沿轨道运行,无需单独配置额外动力;清扫机构2与机器人本体1之间柔性连接,可随机器人本体1进行柔性偏转,不会对机器人本体1造成卡滞、挤压和冲击,运行顺畅。
[0033]
如图1和图2所示,本实施例中,清扫机构2包括包括安装座21、防偏转组件22和毛刷组件23;防偏转组件22包括上夹持单元221和下夹持单元222,上夹持单元221和下夹持单元222相互配合,用于弹性夹持轨道的底边以防止偏转;毛刷组件23包括安装块231和一个以上的毛刷单元232,毛刷单元232安装于安装块231上,安装块231安装于安装座21上。具体地,毛刷单元232包括毛刷2321和导向轮2322,毛刷2321安装于安装块231的下方,导向轮2322则安装于安装块231的上方。上夹持单元221包括行走轮,行走轮安装于安装座21的上方;下夹持单元222包括随动轮,随动轮安装于安装座21的下方。上述清扫机构2,采用防偏转组件22,能够保证整体结构在轨道上不会侧翻等,保证其运行的可靠性;防偏转组件22采用上下夹持的方式,结构简单、运行稳定。采用毛刷组件23,结构简单且易于实现,能够清理干净轨道。
[0034]
实施例二:
[0035]
如图4~7所示,本实施例与实施例一的区别仅在于,云镜系统3安装于机器人本体1的下方。本实施例的巡检机器人适用于类似输煤栈桥等这种环境恶劣,空间足够的场景。其它未述内容与实施例一相同,在此不再赘述。
[0036]
实施例三:
[0037]
如图8所示,本实施例与实施例一的区别仅在于,云镜系统3安装于清扫机构2上且取消清扫机构2。本实施例的巡检机器人适用于城市地下综合管廊等这种环境友好,空间足够的场景。其它未述内容与实施例一相同,在此不再赘述。
[0038]
本实用新型适用于输煤栈桥、城市综合管廊、大型超市及商场等场景,无论空间空旷还是狭窄,均可适用;机器人本体1、清扫机构2以及云镜系统3三大部件模块化生产,大大节约成本,针对不同环境及场景进行搭配组装,安装方便便捷。
[0039]
虽然本实用新型已以较佳实施例揭露如上,然而并非用以限定本实用新型。任何熟悉本领域的技术人员,在不脱离本实用新型技术方案范围的情况下,都可利用上述揭示的技术内容对本实用新型技术方案做出许多可能的变动和修饰,或修改为等同变化的等效
实施例。因此,凡是未脱离本实用新型技术方案的内容,依据本实用新型技术实质对以上实施例所做的任何简单修改、等同变化及修饰,均应落在本实用新型技术方案保护的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1