关节锁的制作方法
1.本技术涉及一种关节锁,该关节锁包括:具有锁定机构的锁体;以及关节杆箍,具有可枢转地彼此连接的多个关节杆和锁定杆。在这方面,关节杆箍的第一端永久地紧固至锁体,并且锁定杆形成关节杆箍的自由第二端,其中,锁定杆可选择性地引入锁体或从锁体释放。锁定机构还具有闩锁,该闩锁可选择性地移动至锁定位置,在该锁定位置,闩锁将引入锁体的锁定杆锁定至锁体,或移动至释放位置,在该释放位置,闩锁释放锁定杆以从锁体去除。
背景技术:
2.例如,这种关节锁可用于固定两轮车,以防止盗窃企图或未经授权的骑走。为此,可枢转地彼此连接的关节杆可首先枢转地分开或折叠分开,使得可从形成自由端的锁定杆开始,围绕两轮车的部分以及围绕固定物体引导关节杆,其中,两轮车的该部分例如为车架部分,该固定物体诸如为自行车停放架。然后,可将锁定杆引入到锁体中,并锁定至锁体,使得关节杆箍形成箍,并将两轮车牢固地连接至固定物体。同样,可引导形成箍的关节杆箍穿过两轮车的车轮之一的轮辐,使得该车轮的运动受到限制或阻挡,并且可抵消未授权骑走两轮车。
3.这种关节锁的锁定机构可例如通过钥匙致动,以选择性地将引入的锁定杆锁定至锁体或从锁体释放锁定杆。还可将这种机械锁定机构配置为组合锁定机构,通过该组合锁定机构可设置密码,以便释放处于锁定位置的闩锁,以便移动至释放位置。
4.特别地,在使用这种用于固定两轮车的关节锁时,通常在不同位置之间频繁地运输所述两轮车,并且因而频繁地操作锁定机构,以便将所引入的锁定杆选择性地锁定至锁体,或用于释放所引入的锁定杆。因此,有一种努力是使用这种便携式锁来为使用者提供尽可能舒适和简单的操作锁定机构的选择,以便使这种频繁致动令人愉快和无干扰。相反,对于上述设计锁定机构的可能性来说,耗时的动作,诸如在组合锁定机构处调整组合是必要的。另外,利用通过钥匙致动的锁,始终存在钥匙丢失的风险。
5.另一个困难在于,这种关节锁的尺寸必须保持尽可能小,以便在运输过程中提供紧凑收纳的可能性。然而,由于箍必须具有一定的延伸以形成足够大的箍,因而特别相关的是尽可能多地限制锁体所占据的空间。然而,锁定机构的高度功能设计的可能性也因而受到限制。
技术实现要素:
6.因此,本技术的一个目的是提供一种关节锁,该关节锁可尽可能舒适地操作,并且可尽可能紧凑地收纳。
7.该目的通过一种具有权利要求1的特征的关节锁来实现,特别地,该锁定机构配置为机电锁定机构,并包括闩锁和电动机,该电动机具有可绕旋转轴线驱动的转子,其中,由于转子的旋转,闩锁可选择性地至少从锁定位置移动至释放位置,在该锁定位置,闩锁将引
入锁体的锁定杆锁定至锁体,在该释放位置,闩锁释放锁定杆以从锁体去除,其中,闩锁从锁定位置到释放位置的运动相对于闩锁的运动轴线进行。
8.设置机电锁定机构可增加这种关节锁的功能,并提供选择性地锁定或释放引入锁体的锁定杆的更舒适的可能性。在这方面,机电锁定机构可使用由电源提供的能量来选择性地将闩锁从锁定位置移动至释放位置。例如,用户因而可仅仅发送电控命令,于是锁定机构立即将闩锁从锁定位置移动至释放位置。为了接收这样的控制命令,可例如设置无线电模块,控制命令可特别地经由运动无线电连接、wifi/wlan连接、蓝牙连接和/或nfc连被发送至该无线电模块,使得对于用户来说可经由运动无线电设备对锁定机构进行控制。进一步舒适的操作可能性可包括使用指纹传感器来输入解锁命令。
9.因而,可简化由用户执行的动作,以选择性地锁定或释放引入到锁体内的锁定杆,特别是加速(授权)解锁。可能丢失的另外的机械钥匙不是绝对必需的。另外,这种锁还可配备有其它功能,这些功能由于可利用的电能而不存在于纯机械锁中。例如,可设置使用用于与用户通信的接口,诸如所述无线电模块,向用户发送关于锁的信息。例如,在这方面,可在正确锁定所引入的锁定杆之后向用户发送信号,或可提供查询关节锁的位置的可能性。
10.闩锁从锁定位置到相对于运动轴线发生的释放位置的运动由该运动轴线限定或规定。在这方面,闩锁从锁定位置到释放位置的运动可对应于围绕运动轴线的旋转运动,同时闩锁从锁定位置到释放位置的运动也可对应于沿着运动轴线的平移运动。
11.可设置自动锁定装置,用于将锁定杆锁定至锁体。在这种情况下,自动锁定仅由于将环的锁定杆引入锁体而发生,例如由于弹簧预加载的闩锁,其中,解锁(释放位置)通过电动机发生。可替代地,电动机也可配置成主动地运动闩锁,不仅选择性地将闩锁从锁定位置移动至释放位置,而且还选择性地将闩锁从释放位置移动至锁定位置,特别是基于相应的电气控制命令。
12.从从属权利要求、说明书和附图中可看出可能的实施方式。
13.在一些实施方式中,(旋转或平移)运动轴线可与转子的旋转轴线同轴地或平行地延伸。
14.由于闩锁的运动轴线相对于转子的旋转轴线的平行或同轴布置,可实现整个锁定机构主要沿着由这两个轴线限定的方向延伸,而垂直于该方向(即,相对于闩锁的运动轴线的径向方向)的整个锁定机构的范围可最小化。特别地,如果闩锁的运动轴线与转子的旋转轴线同轴地延伸,则可实现锁定机构垂直于旋转轴线的最小范围。这首先能够实现锁体的狭窄的和节省空间的设计,而由此不被垂直于旋转轴线或垂直于由旋转轴线和运动轴线限定的方向占据的空间通常也可用于布置其它部件,特别布置电源,从而锁体不要求不合理的大的范围。
15.闩锁的运动轴线还可布置成使其面向锁体的范围无论如何都不会下降到最小尺寸以下的方向,从而能够将关节杆的端部连接至所述锁体(锁定的关节杆箍的第一端部和第二端部之间的必要范围)。由于避免了锁定机构垂直于锁体的这种必要范围的方向的范围,或由于这种安装空间的目标使用,无论如何这种安装空间对于锁定机构的布置都是必要的,因而锁体的总范围可保持尽可能小。
16.另外,锁定机构的空间需求也可相对于转子的旋转轴线和闩锁的运动轴线在轴向上最小化,特别是如果在从锁定位置到释放位置的运动时,闩锁仅执行旋转运动,而不必在
这方面在轴向上平移。通过闩锁的这种运动可实现的是,在闩锁的运动过程中,锁定机构的轴向范围和径向范围都不会改变,从而不需要在锁体内提供自由空间来实现这种运动。
17.作为替代,特别地,如果锁体无论如何在一个方向上具有足够的范围用于该目的,则也可设置成通过平移运动将闩锁从锁定位置移动至释放位置。在这种运动中,锁定机构从闩锁的释放位置到其锁定位置的范围仅在轴向上变化,在该轴向方向上,锁体无论如何都可提供为此所需的空间,例如,由于能够将关节杆箍的两端连接至锁体的需要。同样,在这种情况下,锁定机构因此不会导致锁体在径向方向上的范围增大。
18.在一些实施方式中,锁体可具有纵向轴线,其中,闩锁的(旋转或平移)运动轴线和转子的旋转轴线平行于或同轴于锁体的纵向轴线延伸。在这方面,特别地,锁体的纵向轴线可面向其最大范围的方向,使得锁定机构也可主要在该方向上延伸。由于锁定机构的这种布置,锁体的形状可用于将锁定机构的范围具体地集中到锁体的最大范围的方向上,并使锁体垂直于其纵向轴线的范围最小化,这对于接收锁定机构是必需的。
19.关节杆箍的关节杆可绕各自的关节轴线枢转,其中,关节轴线彼此平行地延伸,并且锁体的纵向轴线平行于关节轴线延伸。在这方面,关节杆例如可通过铆接件连接可枢转地连接至相应的相邻关节杆,并且可为平的和/或直线的。特别地,在关节杆的平坦设计的情况下,关节轴线与锁体的纵向轴线的平行对准使得可使关节杆箍装备数量尽可能大的可枢转的关节杆,并以紧凑的方式将关节杆布置在锁体处。由于在这样的实施方式中,具有电动机和闩锁的锁定机构也可与锁体的纵向轴线同轴地或平行地布置,因而锁体无论如何连接至关节杆箍的端部所必需的这种长度可特别地用于能够以垂直于所述锁体的纵向轴线的最小范围将锁定机构容纳在锁体中。
20.当锁定杆锁定至锁体时,锁体的纵向轴线可从关节杆箍的第一端延伸至第二端。因而,锁体主要在连接至关节杆箍或锁定杆所需的最小尺寸的方向上延伸,并且该范围特别用于布置锁定机构,以便使其垂直于锁体的纵向轴线的空间需求最小化。
21.在一些实施方式中,关节杆箍可折叠成码尺构造,其中,关节杆和锁定杆的纵向轴线彼此平行对齐。因此,形成关节杆箍的自由端的关节杆和锁定杆也可具有可沿其最大范围的方向面对的纵向轴线,其中,特别地,关节杆和锁定杆可为平坦的和/或直线的。在这方面,折叠成码尺构造的关节杆箍可与锁体一起形成平坦包装,这可特别地提供例如在运输期间以紧凑方式收纳接合锁的舒适可能性。
22.这种用于关节锁的紧凑收纳的平坦包装的设计也可改进,因为锁定机构可沿着锁体的纵向轴线布置,并且转子的旋转轴线和闩锁的(旋转或平移)运动轴线可平行于锁体的所述纵向轴线延伸。这使得可最小化锁定机构的范围,并且因而使容纳锁定机构的锁体的范围最小化,垂直于锁体的纵向轴线。
23.在一些实施方式中,锁定杆可具有纵向轴线,其中,当所述锁定杆被引入到锁体中时,闩锁的运动轴线垂直于锁定杆的纵向轴线定向。在锁定位置,闩锁阻挡锁定杆垂直于闩锁的运动轴线的运动,以防止锁定杆从锁体移开。另外,由于锁定杆的这种定向,锁体相对于闩锁的运动轴线的轴向范围可最小化,因为除了锁定机构在轴向方向上占据的空间之外,仅用于容纳锁定杆的空间必须可用。
24.另外,锁定杆可相对于其纵向轴线轴向地引入到锁体中。这使得可沿着清楚限定的运动路径和以预定方式将锁定杆引入到锁体中。因此,可使用例如仅执行从锁定位置到
释放位置或从释放位置到锁定位置的旋转运动的闩锁,并且该闩锁永久地突出到该运动路径中;这种闩锁可以以简单的方式定位在释放位置,使得锁定杆可毫无问题地引入到锁体中,例如,不会卡在闩锁处。可替代地,可设置的是,在将锁定杆引入锁体的过程中使锁定杆枢转,其中,特别地,这种枢转运动可围绕与相邻关节杆共有的关节轴线并且在垂直于闩锁的运动轴线的平面内进行。
25.在一些实施方式中,锁体可具有引入通道,锁定杆可被引入该引入通道中,其中,闩锁至少在锁定位置突出到锁体的引入通道中。
26.在这方面,在锁定位置,闩锁可特别地相对于锁定杆的引入方向横向地突出到引入通道中,以防止锁定杆从锁体释放,并阻止相对于引入方向的运动。当闩锁为了实现锁定杆的锁定而至少在锁定位置突出到锁体的引入通道中时,还可设置的是,闩锁至少部分地还已布置在处于释放位置的引入通道内。例如,执行平移运动的闩锁可已位于释放位置,尽可能靠近由引入的锁定杆所描述的路径,使得锁定所需的闩锁的运动以及相应地锁定机构在锁定位置中相对于闩锁的运动轴线的附加轴向范围可最小化。另外,可将执行旋转运动的闩锁定位成使其永久地突出到锁体的引入通道中,其中,所述闩锁相对于运动轴线的轴向位置在释放位置和锁定位置上没有不同。
27.如上所述,可设置的是,闩锁可通过围绕运动轴线的旋转运动从锁定位置移动至释放位置。为此,闩锁能够可旋转地支承在锁体中,其中,特别地,闩锁的运动可在没有轴向运动部件的情况下发生。因此,闩锁的所述运动轴线在这方面对应于旋转轴线。
28.由于闩锁可仅执行旋转运动以便从锁定位置移动至释放位置,因而闩锁相对于运动轴线的轴向位置在释放位置和锁定位置彼此对应,从而不需要额外的轴向空间来进行闩锁运动。这使得还可保持锁定机构在轴向上尽可能小的范围,并实现所述锁定机构的紧凑设计。另外,在作为旋转轴线的运动轴线的设计中,用于将从电动机传递至转子的旋转运动偏转为闩锁的至少部分平移运动的元件可省略,使得锁定机构不需要用于布置这种元件所必需的任何安装空间。由此节省的安装空间例如可用于在锁体内布置另外的部件,并为关节锁配备增加的功能,而不需要为此不合理地延伸锁体的范围。
29.锁体可具有支承结构,该支承结构具有闩锁支承开口,闩锁支承开口中支承闩锁,其中,闩锁可具有径向加宽的支承部分,该径向加宽的支承部分设置在闩锁支承开口的周边边界上,使得闩锁相对于运动轴线沿轴向支承在支承结构处。由此可保护布置在支承结构后面的机电锁定机构的部件,以免受到经由闩锁沿轴向方向发生的机械力效应。
30.这种支承结构可例如由壳体的壁或支柱形成,并且可特别地是内壳体的部分,锁定机构或其至少部分布置在内壳体内。这使得可以以受控和清楚限定的方式将锁定机构的部件定位在锁体内。另外,在支承结构的壳状设计中,例如,在断开尝试期间,可保护设置在其中的部件免受外部进入或力的影响。
31.特别地,闩锁的径向加宽的支承部分可将闩锁的突出到锁体的引入通道中的部分与面对电动机的闩锁的部分分开,并且可以以齐平的方式并且无间隙地设置在闩锁支承开口的周边边界上。由于该径向加宽的支承部分,可实现的是,可将例如在断开尝试期间沿相对于闩锁的运动轴线的轴向方向施加至闩锁上的力引导至支承结构。在这方面,闩锁还可相对于运动轴线在电动机的方向上轴向支承,从而可防止力从轴向方向通过闩锁传递至电动机或锁定机构的其它部件(例如减速齿轮单元)。
32.在一些实施方式中,闩锁可在将锁定杆引入锁体时永久地接合至锁定杆的运动路径中,并且可仅根据锁定杆的旋转位置锁定或释放锁定杆。因而,不必为闩锁的运动提供轴向安装空间,并且也可相对于闩锁的运动轴线在轴向上实现锁定机构的紧凑布置。
33.在一些实施方式中,闩锁可具有接合部分,该接合部分具有纵向范围,该纵向范围在垂直于闩锁的运动轴线的平面中具有有效长度和有效宽度,其中,锁定杆具有长型通过通道,该通过通道的(净)宽度大于闩锁的接合部分的有效宽度,但小于闩锁的接合部分的有效长度。在这方面,通过通道在第一端开放,该第一端可对应于锁定杆的自由端。通过通道在第二端处通向锁定杆的闩锁接收器,所述闩锁接收器在垂直于通过通道的纵向方向的方向上的净宽度大于通过通道的(净)宽度,并且大于闩锁的接合部分的有效长度。在闩锁的释放位置,闩锁的长型接合部分相对于通过通道纵向定向,使得在将锁定杆引入锁体期间,接合部分确实接合至锁定杆的通过通道中,但是允许将锁定杆引入锁体(其中,接收闩锁的接合部分的锁定杆的通过通道沿着闩锁的接合部分运动)。在这种实施方式中,相比之下,在闩锁的锁定位置,闩锁的长型接合部分与通过通道横向定向。因此,在锁定杆已被引入锁体之后,并且在接合部分接合至锁定杆的闩锁接收器中时,闩锁的接合部分被阻挡而不能逃脱到(较窄的)通过通道中,使得锁定杆不能再次从锁体去除,并且锁定杆因此锁定至锁体。
34.因而,闩锁在释放位置的定向使得有可能将锁定杆引入锁体,其中,通过通道在锁定杆的引入过程中横向围绕闩锁的接合部分,直到接合部分在完全引入时进入锁定杆的闩锁接收器。因此,闩锁可通过旋转从释放位置移动至锁定位置,其中,接合部分的方向同样改变,使得接合部分由于其与通过通道的宽度相比更大的有效长度而防止从锁定杆拉出,并将锁定杆锁定至锁体。为了使接合部分能够在闩锁接收器中的接合部分进行这种旋转,闩锁接收器配置成使得其净宽度至少稍微大于闩锁的接合部分的有效长度。
35.锁定杆的通过通道例如可形成为长型的凹槽,其通向形成闩锁接收器的圆柱形或凹陷状凹槽。在这方面,通过通道和闩锁接收器可在远离闩锁的侧部以壁状方式闭合,同时也可以以完全打开的方式提供通过通道和闩锁接收器,例如作为长型切口或作为孔。
36.在从锁定位置到释放位置的运动期间,闩锁可执行90
°
的旋转。这使得闩锁能够在锁定位置和释放位置中清楚地限定和控制旋转位置,其中,另外,仅需要最小的运动来将闩锁从一个位置转移至另一个位置。例如,用于锁定所引入的锁定杆所需的时间和用于单个闩锁运动所需的能量可由此减少,使得使用者可在长时间内使用关节锁或用于多个锁,而无需例如对供应锁定机构的电能源进行充电或改变。
37.另外,在如上所述的具有接合部分的闩锁的实施方式中,接合部分的总有效长度可用于阻塞通过通道,其中所述接合部分由通过通道的阻塞来锁定引入的锁定杆。相反,在闩锁偏置90
°
的释放位置,接合部分相对于锁定杆的引入方向的纵向范围被最小化,使得锁定杆可舒适地引入到锁体中,并且可抵消通过通道在接合部分处的任何卡住。
38.在一些实施方式中,如上所述,闩锁可通过沿着运动轴线的平移运动而从锁定位置移动至释放位置。为此,闩锁可线性地可运动地支承在锁体中,其中,特别地,可提供没有旋转运动部件的纯平平移运动。在这方面,闩锁可相对于其运动轴线旋转地固定地支承,但可轴向运动地支承在锁体(闩锁的平移运动轴线)中。为了驱动闩锁执行从锁定位置到释放位置的平移运动,锁定机构可具有偏转元件。例如,电动机可使螺旋坡道执行旋转运动,该
旋转运动与闩锁的互补的相对部分协作,以便将坡道的旋转运动转换为闩锁的线性运动。在这方面,所述坡道的驱动可直接进行,其中,在坡道和电动机之间还可提供齿轮,特别是实现由快速旋转的电动机产生的旋转的减小,这将在下面进行解释。
39.在一些实施方式中,转子可经由齿轮连接至闩锁,其中,齿轮配置成以减速方式将转子的旋转运动传递至闩锁,以便驱动闩锁(闩锁的旋转或平移运动)。这种减速齿轮可将转子的旋转减速,但是具有增加的扭矩,传递至转子,使得特别是快速旋转的电动机也可用于驱动闩锁,并且可管理由这种电动机产生的旋转运动。
40.在一些实施方式中,齿轮可将转子同轴地连接至闩锁。因而,闩锁的运动轴线也与转子的旋转轴线同轴地延伸,而所述轴线彼此不具有任何平行的偏置。因此,在通过这种齿轮的连接时,锁定机构垂直于同轴延伸轴线、转子的旋转轴线和闩锁的运动轴线的范围也可最小化,并且可实现紧凑的布置。特别地,齿轮还可与转子的旋转轴线同轴地布置,或以相对于转子的旋转轴线居中的方式布置。然而,可替代地,齿轮也可实现转子的旋转轴线和闩锁的运动轴线之间的平行偏置。
41.电动机、齿轮和闩锁可沿着转子的旋转轴线彼此前后布置。在这方面,特别地,锁定机构的所有这些部件均可设置成与转子的旋转轴线同轴,使得锁定机构总体沿着该轴线延伸,并且因而主要仅在一个方向上延伸,而锁定机构垂直于转子的旋转轴线的范围可最小化。另外,锁定机构的所述部件可沿着锁体的纵向轴线并且在其最大范围的方向上布置,例如,以便具体地利用锁体的范围,该范围在一个方向上无论如何都是必需的,例如,用于连接至关节杆的端部。
42.在一些实施方式中,锁定机构可包括传感器,该传感器配置成检测闩锁的锁定位置和释放位置。在这方面,可设置的是,仅检测到端部位置或进行绝对位置测量。特别地,由传感器获得的该信息可用于关节锁的控制,以协调由电动机产生的转子的旋转,并限定或指示闩锁运动的端点。另外,关于闩锁位置的信息也可例如经由无线电模块发送给用户,以通知用户例如锁定杆已牢固地锁定至锁体。
43.传感器可配置成在检测到锁定位置或释放位置时将相应的检测信号传送到控制装置,其中,控制装置可配置成响应于检测信号控制转子的旋转运动。特别地,控制装置可响应于检测信号自动终止转子运动,以便实现闩锁在释放位置中的清楚限定的定位。如果电动机还设置用于将闩锁转移至锁定位置,则闩锁在锁定位置的正确定位同样可通过响应于传感器的信号而停止转子运动来实现。另外,因此可确保闩锁仅执行从锁定位置转移至释放位置或从释放位置转移至锁定位置的实际必要的运动,以便仅消耗该运动所需的能量。
44.闩锁可包括致动元件,该致动元件在闩锁的锁定位置和释放位置致动传感器。这种致动元件可特别地与闩锁一起形成在一个部件中,其中,也可单独地提供这种元件并且将其连接至闩锁,使得致动元件在其运动期间与闩锁一起运动。在这方面,传感器可例如配置为机械接触传感器,该机械接触传感器在闩锁的锁定位置和释放位置通过与致动元件的接触而被致动,以便发送相应的检测信号。可替代地,传感器和致动元件也可配置成使得传感器可由致动元件非接触地致动,例如,致动元件仅被带入传感器附近。
45.致动元件可包括凸轮,该凸轮在闩锁的锁定位置和释放位置致动传感器。例如,这种致动元件可配置成凸轮盘,特别地,该凸轮盘可与闩锁一起可绕闩锁的运动轴线旋转。在
这方面,凸轮可相对于运动轴线偏心地布置,并且可延伸闩锁的径向范围,使得凸轮可致动传感器,该传感器在释放位置和锁定位置中与闩锁径向间隔开地布置,并且特别地,可通过接触来致动所述传感器。
46.替代地或附加地,除了通过可由致动元件致动的传感器检测闩锁位置,还可设置的是,锁体具有电位器,通过该电位器可确定电动机的旋转角度以及相应的闩锁位置。
47.在一些实施方式中,锁体可具有用于无线地接收用于电动机的控制命令的无线电模块。特别地,这种无线电模块可配置为经由运动电话连接、wifi/wlan连接、nfc连接和/或蓝牙连接从用户接收信号,例如经由运动无线电设备,以使用户能够控制机电锁定机构。为此,无线电模块可连接至控制装置,该控制装置配置成控制锁定机构或电动机。另外,无线电模块还可配置为向用户发送信息以通知用户,例如,关于闩锁的位置或关于发生的锁定杆的锁定。
48.在一些实施方式中,锁体可具有报警装置,该报警装置配置成在检测到断开尝试时输出报警,例如声或光的可感知报警。同样,可设置的是,通过无线电模块或已提到的无线电模块向不在关节锁附近的用户发送这样的警报,使得用户可启动或执行保护由关节锁固定的例如两轮车的对象的必要措施。
49.特别地,这种部件的布置和与其相关联的关节锁的功能的延伸可通过机电锁定机构的节省空间的布置来实现,而不需要与纯机械锁相比不合理地增加的锁体的范围。由于转子的旋转轴线和闩锁的运动轴线的平行或同轴对准,锁定机构垂直于这些轴线的范围可最小化,因而在该方向上节省的安装空间可灵活地用于布置能够实现进一步功能的部件。
50.在一些实施方式中,锁定杆可相对于其纵向轴线轴向地引入到锁体中,其中,锁体可具有外壳体和承载件,所述承载件布置在外壳体内,并支承锁定机构的至少部分。在这方面,锁体还可具有保持结构,该保持结构连接至承载件上,并沿周向地围绕相对于锁体的纵向轴线引入到锁体中的锁定杆。
51.特别地,这种承载件可用于以清楚和限定的方式将锁定机构或其部件定位在锁体内或外壳体内。在这方面,承载件可为内壳体的部分或可形成内壳体,并且可围绕锁定机构,以结合外壳体保护它不受任何断开尝试或其它操作尝试的影响。通常,外壳体和配置为内壳的承载件在这方面都不必完全闭合;这样的壳体可在所有侧部都具有开口,并且例如可为笼状的,以便能够例如在组装过程中接近设置在相应壳体内的部件。
52.由于保持结构围绕锁定杆,锁定杆相对于其纵向轴线引入锁体,因而保持结构可形成或约束锁定杆的引入通道,从而可保护锁定杆免受外部接近。另外,可通过保持结构防止从闩锁去除锁定杆,闩锁处于锁定位置,并通过横向于锁定杆的引入方向的运动接合至锁定杆中,例如通过从锁定杆升高或枢转运动;特别地,锁定杆相对于闩锁的(旋转或平移)运动轴线在轴向上的运动可由保持结构抵消。特别地,为了实现锁定杆的安全保护,保持结构可是刚性的,并且由金属形成。
53.保持结构可与承载件分开形成,并且可例如螺纹连接或焊接到承载件,以建立两个部件的牢固连接。另外,保持结构可与承载件一起形成为一个部件,并例如形成内壳的部分,锁定杆被引入到该内壳中以进行锁定。由于承载件和保持结构二者均由外壳体包围,因而这些固定或支承锁定机构或锁定杆的部件也可被保护,以免受到外部侵入。
54.在一些实施方式中,保持结构可具有闩锁通道开口,该闩锁通道开口具有周边边
界,该周边边界至少在锁定位置周向地围绕闩锁,使得闩锁相对于闩锁的(旋转或平移)运动轴线在径向方向上支承在保持结构处。在这方面,特别地,闩锁可以以齐平和无间隙的方式接触闩锁通道开口的周边边界,使得闩锁通过该边界在相对于其运动轴线的径向方向上以稳定的方式进行支承。
55.由于闩锁在闩锁通道开口中的这种支承,可实现例如在断开尝试期间,将从相对于闩锁的运动轴线的径向方向施加的任何力引导至保持结构,并且经由保持结构引导至承载件中,而这些力不会作用在锁定机构上,特别是不作用在电动机的部件上并且损坏所述电动机。另外,在从锁定位置移动至释放位置的过程中,闩锁通道开口可形成闩锁的引导件,使得在释放位置和锁定位置二者都可实现闩锁的清楚限定的定位。为此,闩锁通道开口可周向地围绕闩锁,特别是在释放位置和锁定位置。
56.保持结构可为笼状的。连接至承载件的保持结构还可由金属制成,以通过锁定至锁体上的锁定杆的运动来抵消操作尝试,并将所述锁定杆牢固地保持为与闩锁接合。
57.在一些实施方式中,锁体可包括闩锁装置,该闩锁装置配置成以力配合的方式保持被引入锁体的锁定杆。
58.这种闩锁装置使得当闩锁不在锁定位置时也能够将引入锁体的锁定杆保持在锁体中。因而,当闩锁移动至释放位置时,已引入锁体的锁定杆牢固地保持在锁体中,并且只能通过使用者有意和有目标的施力而从锁体上拆下。因此,在解锁之后,特别是从锁定杆掉落之后,可抵消从锁定主体突然和不受控制的释放锁定杆,从而可防止可能导致的对由接合锁固定的物体的损坏。
59.该闩锁装置可包括第一保持元件,该第一保持元件配置成以力配合方式将锁定杆保持在第一位置,并且该闩锁装置可包括第二保持元件,该第二保持元件配置成以摩擦传递方式将锁定杆保持在第二位置,其中,锁定杆可选择性地在第二位置锁定至锁体,而锁定杆仅在第一位置可释放地保持在锁体处。因而,使用者可选择性地将锁定杆移动至第一位置或第二位置,其中,这些位置可特别地彼此触觉地区分开。在第一位置,锁定杆可不被锁定至锁体,然而,锁定杆被固定以抵抗不受控制的释放,并且以力配合的方式保持在锁体中。在锁定杆的这个位置,可例如运输关节锁,其中,然后使用者可在不必致动锁定机构的情况下直接从锁体释放锁定杆,以便使用关节锁来固定物体,特别是两轮车,并且可使用锁定杆来固定相应的物体。随后,使用者可直接将锁定杆引入第二位置,以将锁定杆锁定至锁体并固定物体。特别地,为了能够实现位置的触觉可区分性,闩锁装置可为弹性的,并且在锁定杆从第一位置转移至第二位置期间可为可变形的。
附图说明
60.下面将参考实施方式示例和附图通过示例的方式来说明本技术。进一步的实施方式可从说明书的介绍和从属权利要求中看出。在附图中:
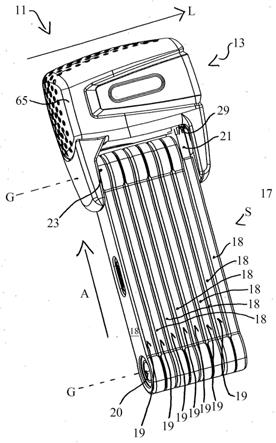
61.图1是关节锁的立体图;
62.图2是关节锁的立体图,其中去除了关节锁的外盖;
63.图3是关节锁的立体图,其中,去除了外盖和外壳体,并且没有关节杆,用于示出锁定机构在内壳体和锁定杆内的布置,锁定杆由保持结构围绕并引入锁体,以及;
64.图4a和图4b是闩锁被去除和插入的内壳体的前视立体图;
65.图5a和图5b是锁定机构的前视立体图和后视立体图;
66.图6a和图6b是闩锁的前视立体图和后视立体图;
67.图7a和图7b是锁定杆的面对闩锁的侧部和锁定杆的远离闩锁的侧部的立体图;
68.图8a和图8b是保持结构的前视立体图和侧视图;
69.图9a和图9b是闩锁的立体图,闩锁通过闩锁通道开口接合至由保持结构界定的引入通道中;
70.图10是闩锁装置的前视立体图,该闩锁装置用于将引入锁体的锁定杆的力配合保持;以及
71.图11a和图11b是关节锁的剖视图和锁体13的放大剖视图。
具体实施方式
72.图1示出了包括锁体13和关节杆箍17的关节锁11,关节杆箍17具有彼此枢转连接的多个关节杆19和锁定杆21。在这方面,关节杆箍17的第一端23永久地连接至锁体13,而锁定杆21可选择性地引入锁体13的引入通道29并锁定至锁体13或从锁体13释放,使得锁定杆21形成关节杆箍17的自由第二端。为了选择性地锁定锁定杆21,锁体13容纳具有电动机27的机电锁定机构15,电动机27配置成选择性地将闩锁25移动至释放位置,在释放位置,引入的锁定杆21可从锁体13释放,或移动至锁定位置,在锁定位置,引入锁体13的锁定杆21锁定至锁体13(参见图5a和图5b)。
73.关节杆箍17的关节杆19和锁定杆21是平坦且基本上是直线的,使得关节杆19和锁定杆21主要沿着各自的纵向轴线a延伸。另外,锁定杆21可从相对于其纵向轴线a的轴向方向引入到锁体13的引入通道29中,使得锁定杆21在这方面描述了引入运动的直线和清楚限定的路径。为了使关节杆箍17的关节杆19能够相对于彼此枢转,关节杆19在其各自端部处通过铆接件20连接至相邻的关节杆19,使得关节杆19可围绕彼此平行延伸的关节轴线g枢转。
74.在所示的图示中,关节锁11放置成所谓的码尺结构,其中,关节杆箍19和锁定杆21的纵向轴线a彼此平行地对齐,并且垂直于锁体13的纵向轴线l,该纵向轴线l从关节杆箍17的第一端23延伸至第二端或延伸至引入到锁体13中的锁定杆21。在这方面,关节锁11形成扁平包装,其中,锁体13在垂直于其纵向轴线l和引入的锁定杆21的纵向轴线a的方向上也是狭窄的。锁体13在垂直于其纵向轴线l的方向上并且沿着引入的锁定杆21的纵向轴线a(即,在折叠的关节杆19的范围内)也是狭窄的。因而,在这种结构中,关节锁11例如可在运输过程中以节省空间的方式舒适地收纳。为此,关节锁11可例如被引入到颤振状保持器中,特别是在用于固定两轮车时。
75.由于关节杆19的关节轴线g与锁体13的纵向轴线l平行对齐,因而关节杆19沿着锁体13的纵向轴线l彼此连接,所述关节杆19在轴向方向上相对于关节轴线g是平坦的。因此,预先限定了锁体13在沿着锁体13的纵向轴线l的方向上的最小所需范围(关节杆箍17的两端23和21与锁体13的连接)。
76.为了改进关节锁11的操作,特别是可由金属制成的关节杆19和锁定杆21具有例如由塑料构成的护套18。另外,锁体13具有外盖65,关节锁11的其它部件布置在外盖65内。该外盖65还主要用于改进关节锁11的操作,并且同样可由塑料制成。
77.如图2所示,外盖65围绕外壳体58,其它部件,特别是可通过外壳体58(参见图3、图4a、图4b、图5a和图5b)保护锁定机构15免受外部访问。为此,外壳体58例如可制造成金属铸造部件,以固定关节锁11来防止任何断开尝试。另外,关节杆箍17的第一端23永久地、且通过铆接件20中的一个可枢转地固定至外壳体58,从而可靠地将形成该第一端23的关节杆19连接至锁体13。
78.在外壳体58内,设置承载件55(参见图3),承载件55配置成内壳体,并围绕锁定机构15(参见图5a和图5b)。特别地,除了固定锁定机构15以防止断开尝试之外,承载件55还用于在锁体13内的预定位置支承锁定机构15的部件,并可靠地保持或定位锁定机构15的部件。
79.保持结构59连接至该承载件,所述保持结构59是笼状的,并且形成引入通道29的边界,锁定杆21可沿着其纵向轴线a线性地引入到引入通道29中。为了将锁定杆21锁定至锁体13,闩锁25相对于其纵向范围横向地突出到引入通道29中,并且将引入的锁定杆21固定在锁定位置,以防止从引入通道29去除,并且因而防止从锁体13释放(同样参见图4b、图5a、图5b、图6a、图6b、图7a、图7b、图9a和图9b)。
80.由于保持结构59形成引入通道29的边界,并相对于锁定杆21的纵向轴线a,周向地围绕引入的锁定杆21,因而保持结构59限制锁定至锁体13的锁定杆21的运动,特别是限制锁定杆21在相对于锁体13的纵向轴线l的轴向方向上远离闩锁25的运动。因而,特别地,可阻止操作尝试,该操作尝试旨在将锁定杆21从闩锁25去除或抬高,该闩锁25通过这种运动横向地突出到引入通道29中(参见图8a至图9b)。
81.为了实现保持结构59与承载件55的可靠和稳定的连接,设置了多个螺钉69(还参见图8a、图8b、图9a和图9b),其中,在图3中可见的螺钉69进一步用于将承载件55和保持结构59固定在外壳体58内,并将承载件55和保持结构59连接至所述外壳体58。因此,布置在承载件55上的部件,特别是锁定机构15也可牢固地设置,并且在外壳体58内具有清楚限定的位置。
82.除了承载件55和由承载件55支承的部件之外,蓄电器57设置在外壳体58内,该蓄电器可通过充电插座79充电,并提供致动锁定机构15所需的电能。另外,扬声器67设置在锁体13的面对关节杆箍1的侧部,并且可为报警装置的部分,使得在检测到断开尝试时可由扬声器67输出声音报警信号,以便向位于关节锁11附近的用户或其他人警告该尝试。为了识别这种尝试,报警装置可例如具有加速度传感器,通过该加速度传感器,可检测到在断开尝试期间通常发生的关节锁11的振动。
83.为了能够接收用于设置在承载件55内的锁定机构15的控制命令或能够向用户发送信息,还设置了同样布置在承载件55的内部区域中的无线电模块87(还参见图11a和图11b)。例如,用户可通过wifi/wlan连接、运动无线电连接、nfc连接或蓝牙连接将用于锁定引入的锁定杆21的命令无线地发送至无线电模块87,所述无线电模块87将该命令转发到控制设备49,该控制设备49使电动机27将闩锁25转移至锁定位置(参见图5a和图5b)。另外,例如,可通过无线电模块87向用户通知正确发生的锁定杆21的锁定。
84.在图1和图3的图示中,锁定杆21没有完全引入到引入通道29中,并且因此可不通过闩锁25锁定至锁体13,而是仅通过闩锁装置63以力配合方式保持在第一位置,该闩锁装置63通过第一保持元件83设置在保持结构59远离闩锁25的侧部(还参见图10)。因此,一方
面,可抵消从引入通道29突然和不希望的释放锁定杆21,而另一方面,例如在码尺构造中运输关节锁11之后,使用者可直接地且在不必致动锁机构15的情况下,通过施加小的力以目标方式从锁体13释放锁定杆21,并且可使用关节杆箍17来固定物体。
85.另外,在引入到引入通道29中的过程中,在锁定杆21所描述的路径的端部区域中的保持结构59处设置摇杆71,所述摇杆71能够在完全引入所述锁定杆21时由锁定杆21折叠,以便致动位置传感器73(还参见图4a、图11a和图11b)。该位置传感器73配置成产生检测信号,该检测信号指示锁定杆21的完全引入,并且该位置传感器73连接至控制装置49,该控制装置49例如可响应于该检测信号自动地将闩锁25转移至锁定位置(还参见图5a和图5b)。因而,使用者只需将锁定杆21完全引入到引入通道中,而不必采取进一步的锁定措施。
86.还可从图4a中看到的是,承载件55具有垂直于锁体13的纵向轴线l定向的支承结构31,并且具有闩锁承载开口33,如已经解释的是,闩锁25通过该闩锁承载开口33横向突出到引入通道29中(还参见图4b、图11a和图11b)。在面对保持结构59的侧部,该圆形闩锁支承开口33具有由周边边界36包围的加宽部分35。在该闩锁支承开口33内,闩锁25由支承部分38支承,其中,在闩锁25处,还形成径向加宽的支承部分37,该径向加宽的支承部分37相对于锁体13的纵向轴线l与支承结构31的加宽部分35轴向接触,并且该径向加宽的支承部分37由边界36周向围绕(还参见图4b、图5a、图5b、图6a、图6b、图11a和图11b)。
87.特别地,从图11b的剖视图可看出的是,由于在闩锁支承开口33的加宽部分35处加宽的支承部分37的这种轴向接触,闩锁25可相对于锁体13的纵向轴线l轴向支承。另外,例如在断开尝试期间,沿该方向施加至闩锁25上的任何力均可经由加宽部分35引导至支承结构31和承载件55,而不会损坏设置在承载件55内的锁定机构15的部分,特别是电动机27。
88.如图5a和图5b所示,关节锁11的锁定机构15部分地布置在电路板56上,该电路板56由承载件55支承,并配置为机电锁定机构15。在这方面,锁定机构15具有电动机27,该电动机27由设置在承载件55和电路板56下方的蓄电器57提供电能,并配置成将转子(未单独指定)设置成绕旋转轴线d旋转。另外,控制装置49联接至电动机27,并配置成控制电动机27和转子的旋转,其中,通常还可提供控制装置49作为单独部件。由电动机27传递至转子的旋转随后通过齿轮45减速,齿轮45包括多个带齿地轮46,并且被减速到输出轴81,闩锁25经由协作的联接元件75和77连接至输出轴81(还参见图4a和图6b)。
89.在所示的图示中,闩锁25处于释放位置,在该释放位置,引入到锁体13中的锁定杆21可从锁定杆中释放出来,并且可从引入通道29中去除。由于电动机27产生的旋转传递至闩锁25,闩锁25可绕与转子的旋转轴线d同轴延伸的运动轴线b旋转90
°
,并且可选择性地移动至锁定位置,在该锁定位置,完全引入锁体13的锁定杆21锁定至所述锁定杆21(还参见图6a、图6b、图7a和图7b)。
90.因而,提供了电动机27、齿轮45和闩锁25相对于转子的旋转轴线d和闩锁25的运动轴线b彼此前后定位的同轴布置。因此,锁定机构15主要在由轴线d和b限定的方向上延伸,而垂直于该方向(即,相对于轴线d和b的径向方向)的锁定机构15的范围可最小化(参见图11a和图11b)。特别地,这涉及锁定机构15垂直于旋转轴线d和垂直于引入到锁体13中的锁定杆21的纵向轴线a的范围,从而可实现锁体13在该方向上的平坦设计,并且关节锁11例如可在图1所示的码尺构造中作为平坦包装运输。
91.另外,锁定机构15的这种同轴设计通常还能够实现锁体13的紧凑设计,其中,垂直
于锁定机构15的范围(即,相对于锁体13的纵向轴线l的径向方向)可利用的安装空间例如可用于布置其它部件,诸如扬声器67、无线电模块87,并且特别是蓄电器57或另一电源。
92.由于旋转轴线d以及闩锁25的运动轴线b也相应地平行于锁体13的纵向轴线l延伸,锁定机构15进一步主要在锁体13具有其最大范围的方向上延伸,并且锁体13的某一范围无论如何都必须能够将关节杆箍17的第一端23和锁定杆21连接至锁体13(还参见图1、图11a和图11b)。因而,可特别地利用这种必要的空间,以便使用机电锁定机构15,并且仍然实现与纯机械锁的情况类似的关节锁11的紧凑设计。因此,特别地,锁体13垂直于其纵向轴线l和引入的锁定杆21的纵向轴线a的范围也可受到限制,并且可在该方向上实现锁体13的狭窄设计。由于锁定机构15在锁体13的纵向轴线l的方向上的范围的集中,锁体13内垂直于该方向的空间还可用于其它部件的布置以及用于为关节锁11配备多种功能,其中,仍然可保持紧凑设计。
93.作为闩锁25的运动轴线b相对于电动机27的转子的旋转轴线d的同轴路线的替代,还可设置例如通过齿轮45来实现这些轴线b和d彼此的平行偏置。特别地,在这方面也可保持锁体13的狭窄设计,该狭窄设计垂直于引入的锁定杆21的纵向轴线a,并且垂直于锁体13的纵向轴线l。
94.由于闩锁25通过旋转大约90
°
从所示的释放位置转移至锁定位置,其中该运动不具有平移运动分量,因而释放位置与锁定位置仅通过闩锁25的旋转位置而不同。然而,闩锁25的轴向位置在该运动期间不改变,使得闩锁25在其引入锁体13期间永久地突出到锁定杆21的运动路径中。因而,锁定机构15相对于闩锁25的运动轴线b在轴向上的范围也独立于闩锁25的位置,从而在该方向上不需要额外的空间来进行闩锁运动,并且锁定机构15也可在该方向上以紧凑的方式布置。
95.为了锁定引入到锁体13中的锁定杆21,闩锁25在垂直于运动轴线b的平面中具有长型接合部分39,所示的处于释放位置的所述长型接合部分39在垂直于运动轴线b的平面中在引入到锁体13中的锁定杆21的纵向轴线a的方向上具有有效长度,并且在垂直于该方向的方向上具有有效宽度(还参见图6a和图6b)。
96.为了能够在闩锁25的该释放位置将锁定杆21引入锁体13的引入通道29中,锁定杆21具有长型通过通道41,该通过通道41的(净)宽度大于闩锁25的接合部分39的有效宽度,但小于闩锁25的接合部分39的有效长度(参见图7a)。另外,锁定杆21的通过通道41在第一端42处开方,而通过通道41在另一端处通向锁定杆21的类似凹陷的闩锁接收器43。
97.因而,在闩锁25的释放位置,长型接合部分39相对于通过通道41纵向定向,使得闩锁25的接合部分39在将锁定杆21引入锁体13的引入通道29的过程中被引导通过通道41的开口端42进入通过通道41的内部空间,该引入相对于锁定杆21的纵向轴线a轴向地进行。在这方面,接合部分39由锁定杆21的通过通道41围绕,但不会阻挡锁定杆21的引入运动。在将锁定杆21完全引入引入通道29的过程中,接合部分39进入锁定杆21的闩锁接收器43,闩锁接收器43在垂直于通过通道41的纵向的方向上具有净宽度,该净宽度大于通过通道41的宽度,并且大于闩锁25的接合部分39的有效长度。由于闩锁接收器43的这种设计,闩锁25可通过在闩锁接收器43内旋转大约90
°
而转移至锁定位置,使得阻挡接合至锁定杆21的闩锁接收器43中的接合部分39逃逸到通过通道41中。
98.另外,锁定机构15的所述同轴设计也可从图11a和图11b的剖视图中看到,其中,图
11a示出了整个关节锁11的剖视图,以及图11b示出锁体13的放大剖视图。锁定机构15居中地布置在锁体13内,其中,电动机27、齿轮45和闩锁25相对于转子的旋转轴线d以与闩锁25的运动轴线b相对应的方式彼此同轴地前后布置。
99.作为图中所示的闩锁25通过围绕运动轴线b的旋转从锁定位置转移至释放位置或从释放位置转移至锁定位置的替代方案,通常也可通过沿着闩锁25的运动轴线b的平移运动,将闩锁25从锁定位置移动至释放位置或从锁定位置移动至释放位置。为此,闩锁可旋转地、固定地、但是相对于运动轴线b可轴向运动地支承在锁体13中,并且电动机27可例如驱动螺旋坡道,以将转子的旋转运动转换为闩锁25的平移运动。在这种情况下,锁定机构15相对于闩锁25的运动轴线b的轴向范围在其释放位置和锁定位置上不同。因此,闩锁25可例如在仅在锁定位置伸入引入通道29,以将锁定杆21锁定至锁体,而在释放位置引入引入通道29期间,闩锁25释放锁定杆21所描述的路径。然而,在这方面,闩锁25还可具有接合部分39,该接合部分在锁定位置接合至锁定杆21的闩锁接收器43中,其中,锁定杆21配置成与平移运动的闩锁25协作,特别是在还没有通过通道41的情况下。
100.再次参考附图,传感器47进一步设置在电路板56上,并配置成检测闩锁25的释放位置和锁定位置(参见图5a和图5b)。为了致动传感器47,闩锁25具有致动元件51,该致动元件51包括凸轮53,该凸轮53相对于运动轴线b偏心地布置(参见图5a、图5b、图6a和图6b)。该致动元件51可与闩锁25一起形成在一个部件中,或可作为单独的部件连接至闩锁25,并且可例如能够被推到闩锁25上。
101.当凸轮53接触传感器47时,传感器47例如可配置成机械接触传感器,在所示的释放位置,在闩锁25从释放位置移动至锁定位置偏置90
°
的过程中,在凸轮53再次与锁定位置中的传感器47接触之前,通过凸轮53释放传感器47。由于该接触的检测,传感器47可检测闩锁25的释放位置和锁定位置二者,并且可将相应的检测信号传送至联接到电动机27的控制装置49。该控制装置49例如可配置成响应于该检测信号来控制电动机27的转子的旋转运动,并且可特别地在到达闩锁25的相应期望位置时停止其旋转。因而,可确保闩锁25正确地定位在两个位置的每一个中,并且电动机27仅产生必要的旋转运动。
102.图8a和图8b再次示出了保持结构59的视图,该保持结构59可通过螺钉69连接至承载件55上(参见图3)。锁定杆21以引入状态布置在该笼状保持结构59内,从而该笼状保持结构59形成引入的锁定杆21的周边边界,并相应地限定引入通道29,在该引入通道29中,锁定杆被引入到锁体13中,用于选择性地锁定。由于引入通道29的这种限制,可限制锁定杆21的运动,例如在相对于运动轴线b的轴向方向上的断开尝试期间将锁定杆21从闩锁25去除,并且可抵消这种尝试。
103.保持结构59还在面对锁定机构15的侧部具有闩锁通道开口61,闩锁25通过该闩锁通道开口61侧向突出到引入通道29中(参见图8a、图9a、图9b、图11a和图11b)。该闩锁通道开口61由周边边界62界定,该周边边界62在周向地围绕突出到引入通道29中的闩锁25。除了闩锁25或其接合部分39的特定支承和定位之外,例如在断开尝试期间,从相对于闩锁25的运动轴线b的径向方向施加至闩锁25上的任何力均可由此经由保持结构59传导至连接至其上的承载件55或传导至外壳体58,从而可特别地防止损坏锁定机构15的其它部件,诸如,防止损坏电动机27或齿轮45。
104.另外,在远离突出至引入通道29的闩锁25的侧部,闩锁装置63布置在保持结构59
内,并配置成以力配合的方式将引入的锁定杆21保持在锁体13中。如图10所示,该闩锁装置63具有第一保持元件83和第二保持元件85,该第一保持元件83和第二保持元件85配置成使得在将所述锁定杆21引入至引入通道29中时,围绕形成在锁定杆21的后侧的升高的保持部分44,并以力配合的方式保持锁定杆21(还参见图7b)。
105.在这方面,第一保持元件83用于将锁定杆21保持在第一位置,然而,在该第一位置中,锁定杆21可不通过闩锁25锁定至锁体13上(还参见图3)。只有在锁定杆21完全引入并将其定位在锁定杆21由第二保持元件85保持的第二位置时,的才可能锁定锁定杆21,这可通过摇杆71对位置传感器73的致动来检测。为了使锁定杆21能够舒适地转移至第一位置和第二位置,闩锁装置63可由弹性材料或可变形材料制成。因此,特别地,第一位置和第二位置对于关节锁11的使用者来说也是可触知地区分的,使得锁定杆21的相应位置是可清楚识别的。
106.因而,关节锁11具有机电锁定机构15,机电锁定机构15的范围主要集中在一个方向上,而垂直于该方向的范围可最小化。由于该范围还平行于锁体13的纵向轴线l设置,因而可特别地利用所述锁体13的范围,其中该范围无论如何都是连接关节杆箍19的端部23和21所必需的,使得机电锁定机构15的布置不会妨碍锁体13或关节锁11的设计,该锁体13或关节锁11的设计是紧凑的,因而对于使用者来说是舒适的。因此,电动机27、齿轮45和闩锁25相对于闩锁25的运动轴线b彼此共轴地彼此前后定位的这种布置使得能够设计具有机电锁定机构15的关节锁11,并且与纯机械锁相比具有增加的功能,而没有为此所需的锁体13的增加的范围。
107.附图标记的说明
108.11 关节锁
109.13 锁体
110.15 机电锁定机构
111.17 关节杆箍
112.18 护套
113.19 关节杆
114.20 铆接件
115.21 锁定杆
116.23 关节杆箍的第一端
117.25 闩锁
118.27 电动机
119.29 引入通道
120.31 支承结构
121.33 闩锁支承开口
122.35 连接部分
123.36 闩锁支承开口的周边边界
124.37 径向加宽的支承部分
125.38 支承部分
126.39 闩锁的接合部分
127.41 锁定杆的通过通道
128.42 通过通道的开口端
129.43 闩锁接收器
130.44 升高的保持部分
131.45 齿轮传动装置
132.46 齿轮
133.47 传感器
134.49 控制装置
135.51 致动元件
136.53 凸轮
137.55 承载件
138.56 电路板
139.57 蓄电器
140.58 外壳体
141.59 保持结构
142.61 闩锁通道开口
143.62 闩锁通道开口的周边边界
144.63 闩锁装置
145.14 外盖
146.67 扬声器
147.69 螺钉
148.71 摇杆
149.73 位置传感器
150.75 联接元件
151.77 闩锁的联接元件
152.79 充电插座
153.81 输出轴
154.83 第一保持元件
155.85 第二保持元件
156.87 无线电模块
157.a
ꢀꢀ
锁定杆和关节杆的纵向轴线
158.b
ꢀꢀ
闩锁运动轴线
159.d
ꢀꢀ
转子旋转轴线
160.g
ꢀꢀ
关节轴线
161.l
ꢀꢀ
锁体纵向轴线
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1