一种刚柔耦合气动肌肉
1.本发明涉及机器人技术领域,具体涉及一种刚柔耦合气动肌肉。
背景技术:
2.随着科学和技术的不断发展,在过去的几个世纪里,人类在许多方面都取得了重大的进展。机器人技术作为人类最伟大的发明之一,自2世纪60年代初问世以来,经历了短短的50年,已取得巨大的进步。工业机器人在经历了诞生、成长、成熟期后,已成为制造业中必不可少的核心装备,而且工业机器人不仅在工厂里成了工人必不可少的伙伴,而且正在以惊人的速度向航空航天、军事、服务、娱乐等人类生活的各个领域渗透。刚性机器人的发展可以说是十分成熟。我国的工业机器人发展的历史已经有20多年。而目前的工业机器人大部分都实现了柔性控制,现在亟待解决的问题就是刚性机器人所存在的一些缺点。例如:和生物直接接触,由于坚硬的外表可能会伤害到生物。由于刚性关节的存在,所以不够灵活,以及无法忽视的重量问题。
3.例如公告号为cn104029217b的专利说明书中公开了一种基于万向联轴节式并联机构的气动肌肉仿生关节,主要部件包括:支撑杆,固定端平台,连接轴,深沟球轴承,三根气动肌肉,第一万向联轴节,前臂平台,孔用弹性挡圈,圆螺母和六个第二万向联轴节,支撑杆的一端与固定端平台的中心通过螺纹固连,另一端通过第一万向联轴节和连接轴与前臂平台相连接;所述三根气动肌肉与前臂平台及固定端平台的连接部分分别采用所述万向联轴节、连接轴、深沟球轴承和弹性挡圈连接,所述连接轴为一阶梯轴,其一端加工螺纹,另一端加工有销钉孔,其中三个第二万向联轴节通过连接轴的销孔端与固定端平台相连,其余三个第二万向联轴节通过连接轴的销孔端与前臂平台相连;两个平台上分别加工出三个120
°
均布的阶梯孔;阶梯孔中安装深沟球轴承,并通过连接轴、圆螺母和孔用弹性挡圈固定。
4.软体机器人就能很好地解决上述问题。它的柔软使生物在与其直接接触过程中不会受到伤害,还有它的运动的柔顺性具有美感,且软体机器人的材质密度也比刚性机器人低,这就意味着,软体机器人的轻便。
5.例如公告号为cn105856219b的专利说明书中公开了一种具有自感知和驱动功能的气动人工肌肉,其特征在于,包括纤维丝、弹性软管、集丝卡箍、压电体、圆柱套管、气管接头、卡箍、电极、驱动电路、感知电路和集丝孔;纤维丝以固定的编织角缠绕在弹性软管外表面,组成编织网。
6.但是软体机器人同样存在着缺点,那就是不可控性,这就是软体机器人的两面性。所以将刚性机器人和软体机器人相结合就是一个趋势,可以扬长避短,达成最优解。
7.总之,各种类型机器人的出现和应用是人类进步的一大标志,在未来社会中,机器人的广泛应用和发展是一个必然的趋势。相信在不远的将来,机器人技术将一定能够为人类带来更多的方便,为人类的文明和发展做出巨大的贡献。
技术实现要素:
8.本发明的目的在于提供一种刚柔耦合气动肌肉,通过刚性骨架和柔性气管结合,在保证稳定运动的同时,不会对生物造成损伤。
9.一种刚柔耦合气动肌肉,包括骨架和沿骨架周向设置的若干气管,所述骨架由若干轴节首尾活动连接组成,骨架与气管通过设置于两者端部的盖板封闭固定,其中一个盖板上设置有用于向气管内充气的充气孔。
10.本方案采用刚性骨架和柔性气管相结合的方式,刚性骨架起到支撑作用,其运动灵活,柔性气管避免了与生物接触时造成生物损伤,充分运用两者优点,弥补两者的不足,得到适用范围广的气动肌肉。
11.作为优选,所述轴节包括端轴节和间轴节,所述间轴节包括外轴节和套于外轴节内且能轴向活动的内轴节;
12.所述间轴节的内轴节与相邻间轴节的外轴节活动连接,其中一个端轴节与相邻间轴节的外轴节活动连接,另一个端轴节与相邻间轴节的内轴节活动连接。
13.内轴节和外轴节可相对移动,提高了气动肌肉的可伸缩性。
14.作为优选,所述端轴节、外轴节和内轴节用于彼此间连接的端部上均设置有万向节叉,相互配合的万向节叉通过球形连接件活动连接。通过球形万向节连接,提高灵活性。
15.作为优选,沿所述内轴节的外壁周向阵列设置有若干第一滑槽,所述外轴节的内壁上设置有与所述第一滑槽配合的第一滑块。
16.作为优选,所述外轴节用于内轴节伸入的端口向内渐缩。渐缩式端口避免内轴节滑出。
17.作为优选,所述端轴节内套设有能轴向活动的封闭节,所述封闭节的端部嵌设于盖板内;
18.盖板上与气管对应的位置设置有伸入气管对气管进行固定的锁柱,所述充气孔贯穿所在盖板上的锁柱。
19.作为优选,沿所述封闭节的外壁周向阵列设置有若干第二滑槽,所述端轴节的内壁上设置有与所述第二滑槽配合的第二滑块。
20.作为优选,所述气管的材质为硅胶。
21.本发明的有益效果:
22.(1)本发明采用刚性骨架和柔性气管相结合的方式,刚性骨架起到支撑作用,其运动灵活,柔性气管避免了与生物接触时造成生物损伤,充分运用两者优点,弥补两者的不足,得到适用范围广的气动肌肉。
23.(2)通过设置能相对活动的内轴节和外轴节,提高了气动肌肉的可伸缩性。
附图说明
24.图1为本发明的结构示意图;
25.图2为本发明的结构示意图(隐去一根气管);
26.图3为骨架的结构示意图;
27.图4为外轴节(端轴节)的结构示意图。
28.图5为内轴节的结构示意图;
29.图6为外轴节与内轴节配合的结构示意图;
30.图7为封闭节的结构示意图;
31.图8为盖板的结构示意图;
32.图9为带充气孔盖板的结构示意图;
33.图10为球形连接件的结构示意图。
具体实施方式
34.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
35.如图1
‑
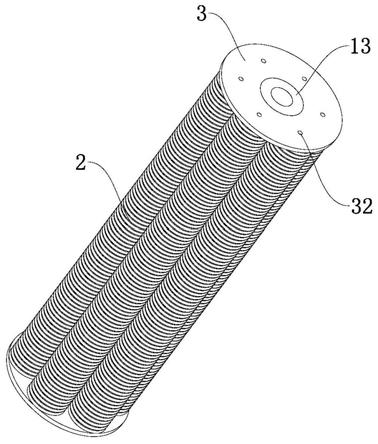
10所示,一种刚柔耦合气动肌肉,包括骨架1和沿骨架1周向设置的若干气管2,骨架1由若干轴节11首尾活动连接组成,骨架1与气管2通过设置于两者端部的盖板3封闭固定,其中一个盖板3上设置有用于向气管2内充气的充气孔32。
36.本实施例中,骨架1周向设置有六个硅胶材质的气管2,骨架1由五段轴节11首尾活动连接组成,轴节11包括位于两端的两个端轴节111和位于中间的三个间轴节112,间轴节112具体由外轴节1121和套于外轴节1121内的内轴节1122组成。间轴节112的内轴节1122与相邻间轴节112的外轴节1121活动连接,其中一个端轴节111与相邻间轴节112的外轴1121节活动连接,另一个端轴节111与相邻间轴节112的内轴节1122活动连接。其中,端轴节111可采用与外轴节1121相同的结构设计。
37.端轴节111与间轴节112以及间轴节112之间均采用万向节活动连接,具体地,端轴节111用于连接的端部上设置有万向节叉12,间轴节112的外轴节1121用于连接的端部上设置有万向节叉12,间轴节112的内轴节1122用于连接的端部上设置有万向节叉12,且相互配合连接的万向节叉12通过球形连接件121活动连接。当然也可选用其他类型的万向节进行连接。
38.内轴节1122能在外轴节1121内轴向活动,具体地,内轴节1122的外壁周向阵列设置有若干第一滑槽11221,外轴节1121的内壁上设置有与第一滑槽11221配合的第一滑块11211;为防止内轴节1122从外轴节1121内滑出,外轴节1121用于内轴节1122伸入的端口向内渐缩,第一滑块11211靠近该渐缩端口设置。
39.本实施例中,轴节11还包括套设于端轴节111内的封闭节13,封闭节13的端部嵌设于盖板3内,便于骨架1的固定。盖板上3与气管2对应的位置设置有伸入气管2对气管2进行固定的锁柱31,其中充气孔32贯穿所在盖板3上的锁柱31
40.封闭节13能在端轴节111内轴向活动,具体地,封闭节13的外壁周向阵列设置有若干第二滑槽131,端轴节111的内壁上设置有与第二滑槽131配合的第二滑块1111。
41.本发明通过向不同气管2内提供气压,并通过改变不同气管2内气压,控制气动肌肉往任意一个方向弯曲运动。
42.尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本
发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1