一种力控关节电机驱动模块
1.本发明涉及机器人技术领域,具体涉及一种力控关节电机驱动模块。
背景技术:
2.在工业生产中对于一些精密零件的装配,传统工业机器人只能做到位置控制,简单来讲就是只能让工业机器人改变位置姿态运动。这样的工业机器人就不够智能,它没有力觉感知能力,从而只能死板的执行位移动作,在安装精密零件时不能做到精确的控制出力,从而可能损坏一些零件,并且如果更改零件的大小就需要重新编程。
3.协作型机器人就具有拖动示教编程的功能,可以降低机器人示教编程的难度,降低机器人生产线的维护成本,在生产线上可以更加灵活的改变路径,但由于没有力矩反馈,不能精确测量外部的受力。
4.为了解决上述问题,市场上出现了力控协作机器人,是在原有协作机器人的基础上各个关节增加力矩传感器,以达到测量关节实时输出的力矩大小,从而通过各关节集成的控制器自动调节出力大小,可以对一些娇气的零件安装出力大小实现自适应控制,让零件均匀受力安装。并且当机器人在运动过程中触碰到障碍时可以立刻停下来,保护人机安全。
5.目前国内大多数协作机器人关节均建立在双编码器测量和弹簧sea测量力矩基础上,上述方式不仅降低了系统刚度,还降低了机器人的力控精度,也增加了算法辨识上面的难度。
6.目前的协作机器人关节可以作为手术机器人关节使用,但是由于力反馈精度低,外科医生不能通过用外科医生控制台的操作手柄感受到实际手术操作时的受力,所以增加了手术的安全风险和手术时间,对患者的手术治疗效果具有一定安全隐患。
7.自适应机器人力控关节则可以用于手术机器人关节,内部集成高精度力矩传感器可以实现机器人和外科医生控制台的操作手柄的实时力矩反馈,从而让医生可以通过手部感受到实际机器人末端手术器具的用力大小,从而可以更好的调节手术的用力,保护患者的手术安全。
8.与常用的协作机器人关节相比,普通的协作机器人采用双编码器或者sea柔性弹簧测量单元作为关节的输出力矩测量传感器,这些方法无法做到高精度的力矩控制,而带有电阻应变式力矩传感器的力控机器人关节具有更高的力矩测量精度,从而可以实现更高精度的力矩控制。
技术实现要素:
9.针对现有技术中的上述不足,本发明提供的一种力控关节电机驱动模块解决了现有技术中关节驱动力不足的问题。
10.为了达到上述发明目的,本发明采用的技术方案为:一种力控关节电机驱动模块,包括:电机驱动模块壳体、输入轴、信号滑环、编码器、电磁制动器、无框力矩电机和动力输
出轴;
11.所述输入轴、信号滑环、编码器、电磁制动器、无框力矩电机和动力输出轴均固定于电机驱动模块壳体内;所述输入轴的一端与信号滑环固定连接,其另一端与编码器固定连接,用于测量输入轴相对电机驱动模块壳体的转动角度;所述无框力矩电机用于根据转动角度,产生驱动力,驱动动力输出轴,输出驱动力;所述电磁制动器用于对动力输出轴进行制动。
12.进一步地,所述电机驱动模块壳体包括:底盖、电机盖和电机壳;
13.所述底盖、电机盖和电机壳依次固定连接;所述编码器和电磁制动器均与电机盖固定连接;所述无框力矩电机与电机壳固定连接。
14.进一步地,所述电机驱动模块壳体的材料类型包括:7075铝合金和6061铝合金。
15.上述进一步方案的有益效果为:电机驱动模块壳体材料使用7075和6061铝合金制作,减轻关节整体的质量,降低功耗。
16.进一步地,所述信号滑环包括:电子滑环主体和母航空插头线束;
17.所述电子滑环主体与母航空插头线束电连接;所述电子滑环主体与输入轴固定连接,所述输入轴与底盖转动连接。
18.上述进一步方案的有益效果为:信号滑环包括转子和定子,在本技术中,转子为电子滑环主体,定子为母航空插头线束,母航空插头线束的作用相当于集线器,内部线路通过这里连接到壳体外部,而转子用于输入外部的机械转动,将这种机械转动传输至输入轴,输入轴带动编码器,编码器测量输入轴相对于电机驱动模块壳体的转动角度,在知道转动角度后,就可以驱动无框力矩电机工作,驱动动力输出轴输出力矩。
19.进一步地,所述编码器包括:编码器电路板和编码器码盘;
20.所述编码器电路板与编码器码盘电连接;所述编码器电路板与电机盖固定连接;所述编码器码盘与输入轴固定连接。
21.进一步地,所述编码器为绝对值磁栅编码器。
22.上述进一步方案的有益效果为:为了使测量结果更加精确,编码器为绝对值磁栅编码器,19位分辨率,采用485总线通信输出,带有位置零点记忆功能,并且外接附件电池作为记忆电源。
23.进一步地,所述电磁制动器包括:电磁线圈、两块衔铁和刹车片;
24.所述刹车片位于两块衔铁之间,并与动力输出轴固定连接;所述两块衔铁与电磁线圈固定连接;所述电磁线圈与电机盖固定连接。
25.进一步地,所述无框力矩电机包括:霍尔换向板、定子线圈绕组和稀土永磁转子;
26.所述霍尔换向板与定子线圈绕组固定连接;所述稀土永磁转子嵌入定子线圈绕组内,并与动力输出轴固定连接。
27.进一步地,所述霍尔换向板上设置了3个霍尔元件,所述3个霍尔元件以120度角分布在霍尔换向板上;
28.所述定子线圈绕组上设置了u、v、w三相线圈;所述稀土永磁转子上环形均匀分布稀土永磁体。
29.进一步地,还包括用于固定的第一深沟球轴承、第二深沟球轴承和轴卡簧。
30.综上,本发明的有益效果为:一种力控关节电机驱动模块具有电机驱动的功能,通
过集成稀土永磁同步无框力矩电机,可以增大电机驱动模块的输出力矩。通过集成电磁制动器,可以在电机停止时刹车制动,防止因为负载自重产生的滑动。因为具有集成性高、紧凑性好、输出力矩大的优点使该一种力控关节电机驱动模块可以用于协作机器人或医疗机器人关节。
附图说明
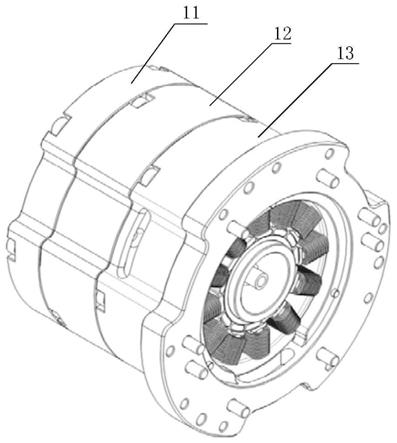
31.图1为一种力控关节电机驱动模块的整体结构示意图;
32.图2为一种力控关节电机驱动模块的剖面图;
33.图3为一种力控关节电机驱动模块的爆炸视图;
34.图4为底盖的结构示意图;
35.图5为电机盖的结构示意图;
36.图6为电机壳的结构示意图;
37.图7为编码器的结构示意图;
38.图8为电磁制动器的结构示意图;
39.图9为无框力矩电机的结构示意图;
40.图10为动力输出轴的结构示意图;
41.其中,10、电机驱动模块壳体;11、底盖;12、电机盖;13、电机壳;1、输入轴;101、信号滑环;102、编码器;103、电磁制动器;104、无框力矩电机;105、第一深沟球轴承;106、轴卡簧;107、第二深沟球轴承;108、动力输出轴;1011、电子滑环主体;1012、母航空插头线束;111、第一螺纹孔;112、第一固定孔;113、第一穿线孔;114、第一顶丝孔;121、第二螺纹孔;122、第二固定孔;123、第三螺纹孔;124、第四螺纹孔;125、第一销孔;126、凹槽;131、第五螺纹孔;132、第三固定孔;133、第二销孔;134、第六螺纹孔;135、第三销孔;136、第二穿线孔;137、第三穿线孔;138、第七螺纹孔;139、第四销孔;1021、编码器电路板;1022、编码器码盘;1023、安装孔;1031、电磁线圈;1032、衔铁;1033、刹车片;1034、第四固定孔;1041、霍尔换向板;1042、定子线圈绕组;1043、稀土永磁转子;1044、线圈绕组;1045、稀土永磁体;1081、第二顶丝孔。
具体实施方式
42.下面对本发明的具体实施方式进行描述,以便于本技术领域的技术人员理解本发明,但应该清楚,本发明不限于具体实施方式的范围,对本技术领域的普通技术人员来讲,只要各种变化在所附的权利要求限定和确定的本发明的精神和范围内,这些变化是显而易见的,一切利用本发明构思的发明创造均在保护之列。
43.如图1~3所示,一种力控关节电机驱动模块,包括:电机驱动模块壳体10、输入轴1、信号滑环101、编码器102、电磁制动器103、无框力矩电机104和动力输出轴108;
44.所述输入轴1、信号滑环101、编码器102、电磁制动器103、无框力矩电机104和动力输出轴108均固定于电机驱动模块壳体10内;所述输入轴1的一端与信号滑环101固定连接,其另一端与编码器102固定连接,用于测量输入轴1相对电机驱动模块壳体10的转动角度;所述无框力矩电机104用于根据转动角度,产生驱动力,驱动动力输出轴108,输出驱动力;所述电磁制动器103用于对动力输出轴108进行制动。
45.电机驱动模块壳体10包括:底盖11、电机盖12和电机壳13;
46.所述底盖11、电机盖12和电机壳13依次固定连接;所述编码器102和电磁制动器103均与电机盖12固定连接;所述无框力矩电机104与电机壳13固定连接。
47.电机驱动模块壳体10的材料类型包括:7075铝合金和6061铝合金。
48.信号滑环101包括:电子滑环主体1011和母航空插头线束1012;
49.所述电子滑环主体1011与母航空插头线束1012电连接;所述电子滑环主体1011与输入轴1固定连接,所述输入轴1与底盖11转动连接。
50.图4中底盖11上的第一螺纹孔111用于固定编码器电路板1021,第一固定孔112用于固定电机盖12,第一穿线孔113用于走线,第一顶丝孔114用于安装电子滑环主体1011。
51.图5中电机盖12上的第二螺纹孔121用于固定底盖11,第二固定孔122用于固定电机壳13,第三螺纹孔123用于固定电磁制动器103,第四螺纹孔124和第一销孔125用于固定编码器102,凹槽126的作用是便于固定编码器102。
52.图6中电机壳13上的第五螺纹孔131和第二销孔133用于固定和对电机盖12进行定位,第三固定孔132用于将本模块与其他外部模块或机械结构固定在一起,第六螺纹孔134和第三销孔135用于固定和定位本电机驱动模块,为了便于走线,电机壳13上设计有第二穿线孔136和第三穿线孔137。第七螺纹孔138用于固定定子线圈绕组1042。第四销孔139也用于电机驱动模块和其他模块之间的定位。
53.编码器102包括:编码器电路板1021和编码器码盘1022;
54.所述编码器电路板1021与编码器码盘1022电连接;所述编码器电路板1021与电机盖12固定连接;所述编码器码盘1022与输入轴1固定连接。
55.如图7所示,所述编码器102上设计有用于固定和定位的安装孔1023,用于将编码器102固定到电机盖12上。
56.在本实施例中,编码器102为绝对值磁栅编码器。
57.输入轴1和编码器码盘1022固定连接,且编码器电路板1021固定在电机盖12上,当所述输入轴1转动时,会带动编码器码盘1022转动,从而测量出输入轴1相对电机盖12的转角。为了达到较高的角度测量精度,利用磁栅编码器测量输入轴1与电机驱动模块壳体10之间的相对转角的精度可高达正负15弧秒。
58.在本发明中,对编码器102的具体形式并不作限定,只要能够测量旋转角位移即可。例如,编码器102也可以是光电式编码器。该光电式编码器便于安装在与电机驱动模块壳体10内。
59.如图8所示,电磁制动器103包括:电磁线圈1031、两块衔铁1032和刹车片1033;
60.所述刹车片1033位于两块衔铁1032之间,并与动力输出轴108固定连接;所述两块衔铁1032与电磁线圈1031固定连接;所述电磁线圈1031与电机盖12固定连接。
61.图8中电磁制动器103还设计有用于将电磁制动器103固定到电机盖12上的第四固定孔1034。
62.当电磁线圈1031通电时,就会吸引衔铁1032,可以使刹车片1033活动,从而使动力输出轴108可以正常转动,当电磁线圈1031失电时,动力输出轴108被抱死,不能转动,起到制动器的效果。综上所述电磁制动器103为电磁式摩擦制动器,用于在电机掉电时,锁住电机侧运动,防止因为负载自重而导致出现的位置滑动。
63.在本发明中,对电磁制动器103的具体形式并不作限定,只要能够产生足够的制动力把后外轴抱死即可。
64.如图9所示,无框力矩电机104包括:霍尔换向板1041、定子线圈绕组1042和稀土永磁转子1043;
65.所述霍尔换向板1041与定子线圈绕组1042固定连接;所述稀土永磁转子1043嵌入定子线圈绕组1042内,并与动力输出轴108固定连接。
66.霍尔换向板1041上设置了3个霍尔元件,所述3个霍尔元件以120度角分布在霍尔换向板1041上,分别测量电机三个相位,起到换向的作用;
67.所述定子线圈绕组1042由u、v、w三相线圈缠绕在电枢上构成,稀土永磁转子1043由稀土钕铁硼磁铁环形分布构成,磁铁外表设计成圆弧型,便于交流伺服矢量控制,并通过过盈固定在动力输出轴108上。
68.为了提高输出的力矩,无框力矩电机104可为无刷永磁同步电机,采用稀土强永磁体作为转子。为了提高输出的转速,无框力矩电机104的供电电压可以为48v,额定转速为3020rpm,同时可以在高转速情况下提供恒定力矩。
69.在本发明中,对无框力矩电机104的具体形式并不作限定,只要能够产生足够的力矩驱动减速器即可。例如,无框力矩电机也可以是三相异步电机。该无框力矩电机104便于安装在电机壳13内。
70.在本实施中所采用的无框力矩电机104的连续堵转力矩为0.58nm,因此,本发明力控关节输出的力矩可高达58nm,使得本发明的一种力控关节电机驱动模块可以应用于协作机器人关节,满足工业制造基本生产的需求。
71.本模块还包括用于固定的第一深沟球轴承105、第二深沟球轴承107和轴卡簧106,在本实施例中,第一深沟球轴承105、第二深沟球轴承107和轴卡簧106均用于固定动力输出轴108。
72.如图10所示,所述动力输出轴108上设计有第二顶丝孔1081,用于连接电机驱动模块的外部轴,外部轴用于将动力输出轴108上的动力进一步传输到其他模块。
73.在外部轴嵌入动力输出轴108中后,通过四个第二顶丝孔1081,将外部轴固定。
74.一种力控关节电机驱动模块的各壳体之间通过紧固件相连,并通过销钉进行定位。
75.综上所述,当电机驱动模块运行时,给电磁制动器103通电解锁,其中电磁制动器刹车片1033与动力输出轴108相连,电磁制动器103解锁后动力输出轴108可以自由旋转,此时通过无框力矩电机104产生三相驱动磁场,驱动所述稀土永磁转子1043旋转。所述稀土永磁转子1043安装在动力输出轴108上,动力输出轴108作为模块的动力输出轴可以输出连接其他模块。其中模块的输入轴1与编码器码盘1042相连,可以测量输入轴1的转角,所述信号滑环101安装在底壳11上。本模块通过对无框力矩电机104和电磁制动器103的集成,减小了所述电机驱动模块的尺寸,便于集成到力控关节中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1