一种油压减振器节点退卸系统及方法与流程
1.本发明的实施例属于减震器专业检修技术领域,更具体地,涉及一种油压减振器节点退卸系统及方法。
背景技术:
2.动车组油压减振器在检修作业时,需将减振器上的橡胶节点进行退卸,拆解(检修作业分为三级修和四级修,三级修指的是行驶里程为120万km,四级修指的是行驶里程为240万km,在三级修拆解时进行检查,损坏的节点需要进行拆解作业,四级修需要全部的拆解作业)过程中需要将减振器的橡胶节点进行退卸。
3.目前的减振器橡胶节点拆解作业时使用半自动工装进行拆解作业,未实现全自动拆解作业,由于动车组的油压减振器的橡胶节点退卸作业的推采用卸力≥35t,且油压减振器重量大,对退卸设备要求较高,同时作业人员的劳动强度较大。
4.专利cn212311354u公开一种城市轨道车辆油压减震器节点专用拆卸工装,包括操作箱,所述操作箱的顶部设有液压缸,所述液压缸的底部设有液压杆,所述液压杆的底部向操作箱内延伸,所述液压杆延伸的一端固定连接有安装板,所述安装板的底部固定连接有压板,所述操作箱的内底部固定连接有承载块,所述承载块上设有转动腔,所述转动腔内设有螺纹杆,所述螺纹杆的一端与转动腔内壁转动连接,所述螺纹杆的另一端贯穿转动腔并固定连接有转块。此专利采用普通的液压压机配备相应的工装进行退卸作业,未实现全自动拆解作业,需要人员进行减振器上下料作业,作业人员劳动强度大且存在安全隐患;同时此专利中压装设备针对不同尺寸减震器节点压卸工作时,未公开对减振器两端进行固定的退卸工装技术方案,而目前的退卸工装需要根据减震器不同型号进行配套安装,特别是动车组中设有18种不同类型的减振器,需要配套的退卸工装数量多,拆解工装管理系统繁琐,导致拆卸效率低。
技术实现要素:
5.针对现有技术的节点退卸装置需更换减振器工装俩匹配不同型号的减振器、退卸不能完全自动化、操作人员劳动强度大等缺陷,本发明提供一种油压减振器节点退卸系统及方法,作业全自动化,无需更换工装,退卸效率高,降低了操作人员劳动强度。
6.为了实现上述目的,本发明提供一种油压减振器节点退卸系统,包括上位机、机器人和退卸装置,其中所述退卸装置包括:设于底部的底部支撑单元;设于所述底部支撑单元内的废料自动回收单元;设于所述底部支撑单元顶部的第一滑动定位单元和退卸单元;对称设于所述第一滑动定位单元顶部的第二滑动定位单元、第三滑动定位单元;以及分别对称设于所述第二滑动定位单元和第三滑动定位单元顶部的自适应浮动支撑单元;上位机根据减振器型号配置相关参数,控制第二滑动定位单元、第三滑动定位单元同步反向位移,机器人抓取减振器并将其水平放置于自适应浮动支撑单元顶部进行固定,第一滑动定位单元进行水平位移使减振器两端节点先后与退卸单元对齐,退卸单元根据配置参数输出压力将
节点压下,废料自动回收单元检测节点掉落并完成回收工作,第一滑动定位单元回复原位,自适应浮动支撑单元将减振器升起后由机器人取出进行下料,在第二滑动定位单元及第三滑动定位单元回复原位后完成减振器节点的全自动化退卸工作。
7.进一步地,所述退卸单元包括动力机构、导向机构、快拆退卸工装机构及支撑机构,其中:所述动力机构与导向机构通过活塞杆顶端固定座连接,所述活塞杆顶端固定座上还设有压力传感器;所述快拆退卸工装机构包括按压套筒和套筒快拆座,所述套筒快拆座侧边设有导向槽和锁紧销,所述按压套筒侧边设有导向块和锁紧孔。
8.进一步地,所述底部支撑单元包括底部支撑钢架,设于支撑钢架顶部的第一固定平台和设于支撑钢架低部的脚杯,其中第一固定平台中心处设有开口。
9.进一步地,所述废料自动回收单元包括废料回收箱、第一减振器节点掉落滑道和落料检测传感器,其中:所述废料回收箱设于支撑钢架内中心处,位于第一固定平台中心开口处下方;所述第一减振器节点掉落滑道一端与所述第一固定平台中心开口连接,另一端与所述废料回收箱连接;所述落料检测传感器设于废料回收箱顶部。
10.进一步地,所述第一滑动定位单元包括第一电动机、第一电动机固定座、第一丝杠、第一丝杠安装座、第一丝杠滑块、第一导轨、第一定位滑块、第二固定平台及第一连接板,其中:所述第一导轨对称设于第一固定平台中心开口处两侧;所述第二固定平台中心设有贯通槽,其顶部在所述贯通槽两侧对称设有第二导轨。
11.进一步地,所述第二滑动定位单元与第三滑动定位单元结构相同,两者对称设于所述第二固定平台顶部,其中:所述第二滑动定位单元包括第二电动机、第二电动机固定座、第二丝杠、第二丝杠安装座、第二丝杠滑块、第二连接板、第二定位滑块及第三固定平台,所述第三固定平台中心处设有开口。
12.进一步地,所述自适应浮动支撑单元包括浮动支撑底座、矩形弹簧、浮动导轴及节点固定座,其中:所述节点固定座包括设于底部的第二环形底座,设于所述第二环形底座顶部的减振器吊耳固定座,以及一端贯穿所述第二环形底座并与减振器吊耳固定座固定连接的第二减振器节点掉落滑道,所述第二减振器节点掉落滑道在压下节点时与所述第一减振器节点掉落滑道对接;所述浮动支撑底座分别设于第三固定平台及第四固定平台顶部中间处,包括第一环形底座和滑道导向套,所述滑道导向套可通过第二减振器节点掉落滑道;所述浮动导轴周向设于所述第一环形底座及第二环形底座之间;所述矩形弹簧套设于所述浮动导轴上。
13.进一步地,所述自适应浮动支撑单元还包括设于分别设于第三固定平台及第四固定平台侧边的v形块及设于所述v形块底部的气缸,在气缸的驱动下,v形块上升,将减振器两端举起并脱离减振器吊耳固定座。
14.优选地,所述退卸装置还包括基本控制单元单元,所述基本控制单元单元包括依次设于支撑钢架顶部侧边的启动按钮、停止按钮及急停按钮。
15.根据本发明的另一个方面,提供一种油压减振器节点退卸方法,包括如下步骤:
16.s1:上位机控制机器人采用激光检测减振器尺寸得出减振器型号,并根据型号配置相关参数;
17.s2:上位机控制第二电动机及第三电动机同步转动,使第三固定平台及第四固定平台反向移动,在两者中心点距离与减振器尺寸一致时停止位移;
18.s3:机器人抓取减振器并调整其姿态,使其两端的吊耳水平放置于减振器吊耳固定座上,完成上料工作;
19.s4:上位机控制第一电动机驱动第二固定平台水平位移,使减振器节点与第一减振器节点掉落滑道对齐;
20.s5:第四电动机驱动电缸根据上位机配置参数输出额定功率,按压套筒将橡胶节点压卸拆除;
21.s6:废料自动回收单元完成发废料回收并通过落料检测传感器向上位机发送信号,确认退卸工作完成;
22.s7:上位机控制第一电动机驱动第二固定平台回复原位,气缸的驱动v形块上升,将减振器两端举起并脱离减振器吊耳固定座;
23.s8:机器人从退卸装置取出减振器完成下料工作;
24.s9:第二电动机及第三电动机分别驱动第三固定平台及第四固定平台回复原位,完成油压减振器节点退卸的全部工作。
25.总体而言,通过本发明所构思的以上技术方案与现有技术相比,能够取得下列有益效果:
26.(1)本发明的一种油压减振器节点环退卸系统,通过上位机控制退卸装置的第二滑动定位单元及第三滑动定位单元同时进行位移,能匹配多种型号的减振器,在第一滑动定位单元带动减振器进行位移使其节点与退卸单元对齐后自动完成退卸工作,废料自动回收单元对废料进行自动回收,同时配合机器人进行自动上下料,实现减振器节点退卸工作的全自动化,大大减少了人员的劳动强度,其可以与mes系统进行对接,具备实现智能化车间水平。
27.(2)本发明的一种油压减振器节点环退卸系统,通过上位机控制第二电动机及第三电动机同时转动,驱动第三固定平台及第四固定平台同步反方向位移,进而调整两者间相对距离以适应不同型号的减振器,无需操作人员根据减振器型号进行拆装工装;通过第一电动机带动第二固定平台水平位移,使减振器两端先后进行退卸工作,无需操作人员手动搬运调整方向,减轻了其劳动强度,提高了拆卸效率同时其精度也得到有效保障。
28.(3)本发明的一种油压减振器节点环退卸系统,通过对橡胶节点压卸时使第一减振器节点掉落滑道与第二减振器节点掉落滑道对接,对橡胶节点掉落途经进行封闭,避免其压出时携带动能过大导致飞出对操作人员造成伤害,提高了本系统的安全性能。
29.(4)本发明的一种油压减振器节点环退卸系统,通过设有压力传感器,可指导动力机构输出压力,对不同型号的减振器采取输出适当的压力值,避免压力过小时橡胶节点无法压出,压力过大时橡胶节点压出动能过大对退卸装置造成损伤。
30.(5)本发明的一种油压减振器节点环退卸系统,通过设有快拆退卸工装机构,可快速更换按压套筒,满足各类型标准和非标橡胶节点的拆卸需求,使整体系统的适用性得到很大程度的提升。
31.(6)本发明的一种油压减振器节点环退卸系统,本发明的油压减振器节点退卸系统,采用伺服电机做驱动源,其中第四电动机采用大功率伺服电机,其与电缸配合输出压力满足各类减振器橡胶节点的压卸需求,其抗过载能力强,发热小和噪音低,减少了后期维护时间,同时输功率精度高,能控制输出压力适配不同类型的减振器;第一电动机、第二电动
机及第三电动机采用高精度伺服电机,其运行平稳、精度高,能在上位机的控制下精确却地完成橡胶节点的退卸工作。
32.(7)本发明的一种油压减振器节点环退卸系统,通过在废料回收箱顶部设有落料检测传感器,可对橡胶节点废料进行计数,在出现漏压和退卸不完全导致橡胶节点未掉落的情况时可通过上位机及时发出警报,提示操作人员出现异常状况,以确保橡胶节点废料的脱落回收工作正常进行,在废料回收箱堆满时,落料检测传感器向上位机发出信号提示操作人员进行卸料,操作人员可将废料回收箱取出将橡胶节点废料清空转移。
附图说明
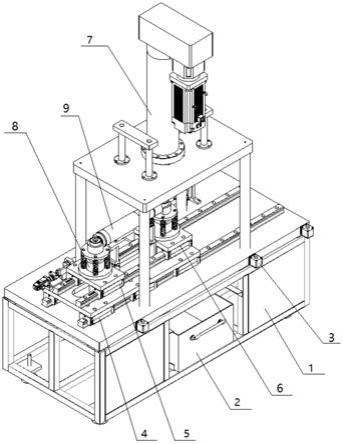
33.图1为本发明实施例中一种油压减振器节点退卸系统中退卸装置的结构示意图;
34.图2为本发明实施例中底部支撑单元、废料自动回收单元及基本控制单元的结构示意图;
35.图3为本发明实施例中退卸单元的结构示意图;
36.图4为本发明实施例中动力机构的结构示意图;
37.图5为本发明实施例中导向机构的结构示意图;
38.图6为本发明实施例中快拆退卸工装机构的结构示意图;
39.图7为本发明实施例中第一滑动定位单元的结构示意图;
40.图8为本发明实施例中第一滑动定位单元的底视图;
41.图9为本发明实施例中第二滑动定位单元和第三滑动定位单元的结构底视图;
42.图10为本发明实施例中自适应浮动支撑单元的结构示意图;
43.图11为本发明实施例中自适应浮动支撑单元的底视图;
44.图12为本发明实施例中一种油压减振器节点退卸方法的流程示意图。
45.在所有附图中,同样的附图标记表示相同的技术特征,具体为:
46.1-底部支撑单元、11-第一固定平台、12-底部支撑钢架、13-脚杯;
47.2-废料自动回收单元、21-废料回收箱、22-第一减振器节点掉落滑道、23-落料检测传感器;
48.3-基本控制单元单元、31-启动按钮、32-停止按钮、33-急停按钮;
49.4-第一滑动定位单元、41-第一电动机、42-第一电动机固定座、43-第一丝杠、44-第一丝杠安装座、45-第一丝杠滑块、46-第一导轨、47-第一定位滑块、48-第二固定平台、481-贯通槽、482-第二导轨、49-第一连接板;
50.5-第二滑动定位单元、51-第二电动机、52-第二电动机固定座、53-第二丝杠、54-第二丝杠安装座、55-第二丝杠滑块、56-第二连接板、57-第二定位滑块、58-第三固定平台;
51.6-第三滑动定位单元、61-第三电动机、62-第三电动机固定座、63-第三丝杠、64-第三丝杠安装座、65-第三丝杠滑块、66-第三连接板、67-第三定位滑块、68-第四固定平台;
52.7-退卸单元、71-动力机构、711-电缸、712-第四电动机、7111-缸筒、7112-活塞杆、713-缸筒固定座、714-活塞杆顶端固定座、715-压力传感器、72-导向机构、721-导向板、722-导向轴、723-导向轴轴套、724-导向轴连接板、73-快拆退卸工装机构、731-按压套筒、732-套筒快拆座、7321-导向槽、7322-锁紧销、733-固定底座、74-支撑机构、741-第四固定平台、742-立柱;
53.8-自适应浮动支撑单元、81-浮动支撑底座、811-第一环形底座、812-滑道导向套、82-矩形弹簧、83-浮动导轴、84-节点固定座、841-第二环形底座、842-减振器吊耳固定座、843-第二减振器节点掉落滑道、85-v形块、86-气缸;
54.9-减振器。
具体实施方式
55.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。此外,下面所描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
56.如图1-9所示,本发明公开了一种油压减振器节点退卸系统,包括上位机、机器人和退卸装置,上位机根据减振器9的型号调整退卸装置使其匹配减振器9尺寸,同时机器人在上位机的控制下抓取减振器9并调整其姿态后将其放置于退卸装置上,退卸装置完成对减振器节点退卸工作并将废料回收;其中所述退卸装置包括底部支撑单元1、废料自动回收单元2、基本控制单元单元3、第一滑动定位单元4、第二滑动定位单元5、第三滑动定位单元6、退卸单元7及自适应浮动支撑单元8,所述自适应浮动支撑单元8对减振器节点进行支撑固定,其在第二滑动定位单元5及第三滑动定位单元6上各设有一组,在第二滑动定位单元5及第三滑动定位单元6调节相对距离后对不同尺寸的减振器9两端进行支撑固定;所述第一滑动定位单元4设于第二滑动定位单元5及第三滑动定位单元6底部,可在减振器9安装完成将带动其进行位移,使其两端的减振器节点先后与退卸单元7对齐,退卸单元7将减振器节点进行退卸后,废料自动回收单元2对废料进行回收;在减振器节点的退卸工作过程中,基本控制单元单元3用于人工维护作业时对退卸装置进行启动、停止和急停操作。本发明的油压减振器节点环退卸系统,通过上位机控制退卸装置的第二滑动定位单元5及第三滑动定位单元6同时进行位移,能匹配多种型号的减振器9,第一滑动定位单元4带动减振器9进行位移使其节点与退卸单元7自动完成退卸工作,废料自动回收单元2对废料进行自动回收,同时配合机器人进行自动上下料,实现减振器节点退卸工作的全自动化,大大减少了人员的劳动强度,其可以与mes系统进行对接,具备实现智能化车间水平。
57.如图2所示,本发明实施例中,所述底部支撑单元1设于退卸装置的底部,对其它功能单元进行固定支撑,包括底部支撑钢架22,设于支撑钢架22顶部的第一固定平台11和设于支撑钢架12低部的脚杯13,其中第一固定平台11上设有多个螺栓固定孔位,可用于连接固定第一滑动定位单元4及退卸单元7,其中心处设有开口用于通过减振器节点的废料;所述支撑钢架22采用钢构件焊接而成,其整体结构强度高,抗震性强,能保证在退卸橡胶节点时整体装置的稳定性;所述脚杯13可用于调整退卸装置的平衡与水平。
58.本发明中实施例中,拆卸的减振器节点废料通过废料自动回收单元2进行回收。所述废料自动回收单元2包括废料回收箱21、第一减振器节点掉落滑道22和落料检测传感器23,所述废料回收箱21设于支撑钢架内22中心处,位于第一固定平台11中心开口处下方,用于盛放掉落的橡胶节点废料;所述第一减振器节点掉落滑道22一端与第一固定平台11中心开口连接,另一端与废料回收箱21连接,其将掉落的减振器节点废料导入废料回收箱21内;进一步地,通过在废料回收箱21顶部设有落料检测传感器23,可对橡胶节点废料进行计数,
在出现漏压和退卸不完全导致橡胶节点未掉落的情况时可通过上位机及时发出警报,提示操作人员出现异常状况,以确保减振器节点废料的脱落回收工作正常进行,在废料回收箱21堆满时,落料检测传感器23向上位机发出信号提示操作人员进行卸料,操作人员可将废料回收箱21取出将橡胶节点废料清空转移。本发明实施例中,通过设有废料自动回收单元2,可对橡胶节点废料进行自动回收,无需操作人员每完成减振器节点的退卸工作后就必须进行手动回收废料,减轻了操作人员的工作量,同时能确保减振器节点的完全退卸,不会出现漏压等情况。
59.为方便操作人员人工介入油压减振器节点环退卸系统进行临时维护,本发明实施例中,通过设有基本控制单元单元3对退卸装置进行控制,所述基本控制单元单元3包括依次设于支撑钢架22顶部侧边的启动按钮31、停止按钮32及急停按钮33,三者分别用于人工作业时进行启动、停止及急停作业。
60.如图3-6所述,所述退卸单元7包括动力机构71、导向机构72、快拆退卸工装机构73及支撑机构74;其中,所述支撑机构74包括第四固定平台741和将第四固定平台741固定于第一固定平台11上的立柱742,所述第四固定平台741与第一固定平台11在竖直方向的中心轴线重合。所述动力机构71包括电缸711和第四电动机712,两者间采用折返式的连接方式进行连接,电缸711的缸筒7111通过缸筒固定座713固定于第四固定平台741顶部中心处,其活塞杆7112通过活塞杆顶端固定座714与导向机构72连接,所述活塞杆顶端固定座714上还设有压力传感器715,用于检测活塞杆7112施加压力,上位机可根据压力传感器715测得压力值,指导动力机构71输出压力,对不同型号的减振器采取输出适当的压力值,避免压力过小时橡胶节点无法压出,压力过大时橡胶节点压出动能过大对退卸装置造成损伤。所述导向机构72用于电缸711压下过程中,起到导向作用,保证活塞杆7112的竖直压下,其包括导向板721、导向轴722、导向轴轴套723及导向轴连接板724,其中所述导向板721设于第四固定平台741底部并与其保持平行,两者竖直方向的中心轴心重合;所述导向轴722一端穿过设于上第四固定平台741的导向轴轴套723与导向板721顶部连接,其顶部与导向轴连接板724连接,通过在导向板721顶部同一端设有两根导向轴722形成导向轴组,在导向板721顶部两端对称设有导向轴组,可限制导向板721水平方向的位移,使其在竖直方向位移时始终与第四固定平台741平行且两者竖直方向的中心轴心不会出现偏离,进一步地,所述导向板721中心处设有螺栓固定孔位,活塞杆顶端固定座714通过螺栓固定孔位实现与导向板721顶部的连接,在活塞杆7112的压下的过程中,导向机构72对其进行导向,避免在受到径向外力时发生偏移导致损坏。所述快拆退卸工装机构73设于导向板721底部中心处,两者中心轴线重合,其包括按压套筒731、套筒快拆座732及固定底座733,所述固定底座733通过螺栓与导向板721固定连接;所述套筒快拆座732设于固定底座733底部,其侧边设有导向槽7321和锁紧销7322,所述按压套筒731侧边设有导向块和锁紧孔,通过导向块导向槽7321配合,可快速地将锁紧孔与锁紧销7322对齐,旋转锁紧销7322可将其插入锁紧孔内,实现按压套筒731快速安装,拆卸时只需反向操作即可快速完成拆卸工作;按压套筒731与橡胶节点匹配,可在动力机构71通过压力下,将减振器节点从吊环中压出,对于非标减振器节点时,可通过与套筒快拆座732配合,更换相应的套筒进行退卸工作。
61.如图7-8所示,本发明实施例中,所述第一滑动定位单元3设于第一固定平台11顶部,包括第一电动机41、第一电动机固定座42、第一丝杠43、第一丝杠安装座44、第一丝杠滑
块45、第一导轨46、第一定位滑块47、第二固定平台48及第一连接板49。所述第一电动机41通过第一电动机固定座42安装于第一固定平台11顶部侧边,其将动力通过传输机构传至第一丝杠43,带动第一丝杠43转动;所述第一丝杠43通过两端设有的第一丝杠安装座44固定于第一固定平台11顶部,其杠身上设有第一丝杠滑块45,其在第一丝杠43的转动下,可沿第一丝杠43的中心轴线方向水平位移;所述第一导轨46对称设于第一固定平台11中心开口处两侧,其与第一丝杠43保持此平行;所述第一定位滑块47设于第一导轨46顶部,其可沿第一导轨46进行水平滑动;第二固定平台48底部两侧与第一定位滑块47顶部固定连接,其中心处设有贯通槽481;第二固定平台48顶部在底部贯通槽481两侧还对称设有第二导轨482;所述第一连接板49设于第二固定平台48侧边,其另一端与第一丝杠滑块45固定连接。通过第一电动机41带动第一丝杠43转动,第一丝杠滑块45在第一丝杠43水平位移,从而带动第二固定平台48沿第一导轨46水平位移,在上位机的控制下,可精确地控制第二固定平台48位移距离。
62.如图9所示,本发明实施例中,所述第二滑动定位单元5与第三滑动定位单元6结构相同,两者对称设于第二固定平台48顶部。所述第二滑动定位单元5包括第二电动机51、第二电动机固定座52、第二丝杠53、第二丝杠安装座54、第二丝杠滑块55、第二连接板56、第二定位滑块57及第三固定平台58。其中,所述第二电动机51及第二丝杠53设于第二固定平台48顶部一侧;所述第二定位滑块57设于第二导轨482上,其顶部设有第三固定平台58;所述第三固定平台58中心处设有开口,可通过橡胶节点废料;通过第二电动机51驱动第二丝杠53进行转动,第二固定平台48可实现在第二导轨59上的水平位移。所述第三滑动定位单元6包括第三电动机61、第三电动机固定座62、第三丝杠63、第三丝杠安装座64、第三丝杠滑块65、第三连接板66、第三定位滑块67及第四固定平台68。上位机控制第二电动机51及第三电动机61同时转动,驱动第三固定平台58及第四固定平台68同步反方向位移,进而调整两者间相对距离以适应不同型号的减振器9,无需操作人员根据减振器9型号进行拆装工装,减轻了其劳动强度,提高了拆卸效率同时其精度也得到有效保障。
63.如图10-11所示,本发明实施例中,所述自适应浮动支撑单元8设有两组,分别对称设于第三固定平台58及第四固定平台68顶部,其包括浮动支撑底座81、矩形弹簧82、浮动导轴83、节点固定座84、v形块85及气缸86。其中,所述节点固定座84包括设于底部的第二环形底座841,设于第二环形底座841顶部的减振器吊耳固定座842,以及一端贯穿第二环形底座841并与减振器吊耳固定座842固定连接的第二减振器节点掉落滑道843,三者中心轴线重合,下退卸过程中,减振器吊耳套设于减振器吊耳固定座842中,退卸单元7对减振器节点进行施加压力,使第二减振器节点掉落滑道843穿过第三固定平台58中心开口,并下沉通过第二固定平台48的贯通槽481,与设于第一固定平台11中心开口处的第一减振器节点掉落滑道22进行对接,保证减振器节点掉落后可沿第二减振器节点掉落滑道843及第一减振器节点掉落滑道22进入废料回收箱21内,无需操作人员手工捡取,实现废料的自动回收,同时对减振器节点掉落途经进行封闭,避免其压出时携带动能过大飞出对操作人员造成伤害,提高了本系统的安全性能。为保证第一减振器节点掉落滑道22与第二减振器节点掉落滑道843精确对接,通过在第三固定平台58及第四固定平台68顶部中间处分别设有浮动支撑底座81,其包括第一环形底座811和滑道导向套812,所述滑道导向套812可通过第二减振器节点掉落滑道843,避免第二减振器节点掉落滑道843其在压下的过程中出现径向偏移;进一
步地,所述第一环形底座811及第二环形底座841之间周向设有浮动导轴83,所述浮动导轴83上设有矩形弹簧82,通过浮动导轴83与矩形弹簧82,可保证第二减振器节点掉落滑道843其在压下的过程不出现偏移,能与第一减振器节点掉落滑道22精确对接,同时可在完成退卸工作后使第二减振器节点掉落滑道843回复原位,避免其水平位移时与第一减振器节点掉落滑道22摩擦出现损坏。所述v形块85分别设于第三固定平台58及第四固定平台68侧边,其底部设有气缸86,在气缸86的驱动下,v形块85上升,将减振器9两端举起并脱离减振器吊耳固定座842,机器人从退卸装置取出减振器9完成下料工作。
64.本发明实施例中,所述的油压减振器节点退卸系统工作原理为:上位机控制机器人采用激光检测减振器尺寸得出减振器9型号,根据减振器9型号及尺寸控制第二电动机51及第三电动机61同步转动,使第三固定平台58及第四固定平台68反向移动,在两者中心点距离与减振器9尺寸一致时停止位移,同时机器人抓取减振器9并调整其姿态,使其两端的吊耳水平放置于减振器吊耳固定座842上,完成上料工作后,上位机控制第一电动机41驱动第二固定平台48水平位移,在第二减振器节点掉落滑道843与第一减振器节点掉落滑道22对齐时停止位移,第四电动机712驱动电缸711开始工作并输出与减振器9型号匹配的功率,活塞杆7112带动导向机构72向下位移,按压套筒731与减振器节点接触并将其压下,此时第一减振器节点掉落滑道22与第二减振器节点掉落滑道843对接,减振器节点掉落进入废料回收箱21,落料检测传感器23将检测信号发送至上位机,完成减振器一端的减振器节点退卸工作;上位机控制第一电动机41驱动第二固定平台48水平位移,使另一端减振器节点与按压套筒731对齐并完成退卸工作,检测传感器23再次发送信号确认退卸工作已全部完成,上位机控制第一电动机41驱动第二固定平台48回复原位,气缸86的驱动v形块85上升,将减振器9两端举起并脱离减振器吊耳固定座842,机器人从退卸装置取出减振器9完成下料工作,第二电动机51及第三电动机61分别驱动第三固定平台58及第四固定平台68回复原位,完成油压减振器节点退卸的全部工作。
65.本发明的油压减振器节点退卸系统,通过设有第二滑动定位单元5与第三滑动定位单元6调节两者的相对距离,可适配动车组不同尺寸型号的油压减振器;通过设有压力传感器715检测输出压力,可根据不同型号的油压减振器通过上位机控制退卸单元7输出相匹配压力完成退卸工作,避免对油压减振器和退卸装置造成损伤;通过设有快拆退卸工装机构73,可快速更换按压套筒731,满足各类型标准和非标减振器节点的拆卸需求,使整体系统的适用性得到很大程度的提升。
66.本发明的油压减振器节点退卸系统,采用伺服电机做驱动源,其中第四电动机712采用大功率伺服电机,其与电缸711配合输出压力满足各类减振器节点的压卸需求,其抗过载能力强,发热小和噪音低,减少了后期维护时间,同时输功率精度高,能控制输出压力适配不同类型的减振器;第一电动机41、第二电动机51及第三电动机61采用高精度伺服电机,其运行平稳、精度高,能在上位机的控制下精确却地完成减振器节点的退卸工作。
67.如图12所示本发明还提供一种油压减振器节点退卸方法,包括如下步骤:
68.s1:上位机控制机器人采用激光检测减振器尺寸得出减振器9型号,并根据型号配置相关参数;
69.s2:上位机控制第二电动机51及第三电动机61同步转动,使第三固定平台58及第四固定平台68反向移动,在两者中心点距离与减振器尺寸一致时停止位移;
70.s3:机器人抓取减振器9并调整其姿态,使其两端的吊耳水平放置于减振器吊耳固定座842上,完成上料工作;
71.s4:上位机控制第一电动机41驱动第二固定平台48水平位移,使减振器节点与第一减振器节点掉落滑道22对齐;
72.s5:第四电动机712驱动电缸711根据上位机配置参数输出额定功率,按压套筒731将橡胶节点压卸拆除;
73.s6:废料自动回收单元2完成发废料回收并通过落料检测传感器23向上位机发送信号,确认退卸工作完成;
74.s7:上位机控制第一电动机41驱动第二固定平台48回复原位,气缸86的驱动v形块85上升,将减振器两端举起并脱离减振器吊耳固定座842;
75.s8:机器人从退卸装置取出减振器9完成下料工作;
76.s9:第二电动机51及第三电动机61分别驱动第三固定平台58及第四固定平台68回复原位,完成减振器节点退卸的全部工作。
77.本领域的技术人员容易理解,以上所述仅为本发明的较佳实施例而已,并不用于限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1