一种燃料电池极板抓取工装的制作方法
1.本实用新型涉及燃料电池技术领域,特别涉及一种燃料电池极板抓取工装。
背景技术:
2.当下均采用真空吸盘吸取的方式抓取燃料电池极板,吸盘在吸取燃料电池后运输的过程中,极易发生吸嘴内真空环境被破坏等导致燃料电池极板掉落的问题,故亟需一种能够稳定抓取燃料电池确保其安全的抓取工装。
技术实现要素:
3.本实用新型的目的在于提供一种燃料电池极板抓取工装,可对燃料电池进行有效且稳定的抓取。
4.本实用新型提供一种燃料电池极板抓取工装,包括一固定机构和二夹爪机构,每一所述夹爪机构均包括伸缩气缸和与该伸缩气缸的伸缩杆连接的夹爪,二所述伸缩气缸相互平行且分别固定于所述固定机构上表面的对角区域,所述固定机构的上述两对角区域各具有一限位孔,所述夹爪的上端与对应的伸缩杆连接,下端为夹取端,其穿过对应的限位孔且自所述固定机构的下表面向下凸出,所述伸缩气缸驱动其伸缩杆伸缩时,对应的所述夹爪通过在所述限位孔内前后运动而实现抓取和释放电池极板。
5.进一步地,每一所述夹爪均包括二子爪,每一所述子爪均具有所述的夹取端,每一所述伸缩气缸具有二伸缩杆,每一所述伸缩杆均与一所述子爪连接。
6.进一步地,每一所述伸缩气缸具有相互独立的二驱动机构,每一所述伸缩杆均连接一所述驱动机构以被独立的驱动伸缩。
7.进一步地,每一所述子爪均包括与伸缩杆固定连接的固定部、与所述固定部连接的连接部和位于所述连接部相对两端的二夹持柱,所述连接部的厚度小于所述夹持柱的厚度从而使同一所述子爪的两夹持柱之间具有让位空间,所述夹持柱的下端为所述夹取端,同一所述子爪中的一所述夹持柱为外夹持柱,另一所述夹持柱为内夹持柱,同一所述子爪的二所述夹持柱之间具有嵌位空间,所述内夹持柱的高度小于所述嵌位空间的顶部高度,同一夹爪中的二所述子爪前后交叠设置且二让位空间至少局部重合,且一子爪的内夹持柱伸入另一子爪的嵌位空间。
8.进一步地,同一夹爪中一子爪的固定部的厚度与其连接部的厚度相等,该子爪的连接部更加靠近所述伸缩气缸,另一子爪的固定部的厚度与其夹持柱的厚度相等,所有夹持柱具有相同的厚度,同一所述夹爪中二所述连接部的厚度之和等于夹持柱的厚度。
9.进一步地,一所述子爪的连接部的厚度等于其夹持柱厚度的一半。
10.进一步地,每一所述伸缩气缸均固设有防撞挡块,所述伸缩杆穿过所述防撞挡块后与所述夹爪连接。
11.进一步地,所述防撞挡块具有上防撞部与下防撞部,所述上防撞部的下端对准所述固定部,所述下防撞部对准所述内夹持柱的上端。
12.进一步地,所述固定机构为板状结构,其下表面为平面,所述夹爪抓取电池极板时,所述固定机构的下表面与电池极板的上表面接触。
13.进一步地,每一所述限位孔外侧的固定机构的下表面均向下设有用于确定待夹取的电池极板位置的定位机构。
14.本实用新型的技术效果:(1)可取代真空吸盘对燃料电池极板进行抓取; (2)两所述夹爪机构对角错位分布,技能保证对燃料电池极板进行稳定抓取,还能保证在抓取后不轻易掉落。
附图说明
15.图1是本实用新型一种燃料电池极板抓取工装的立体示意图;
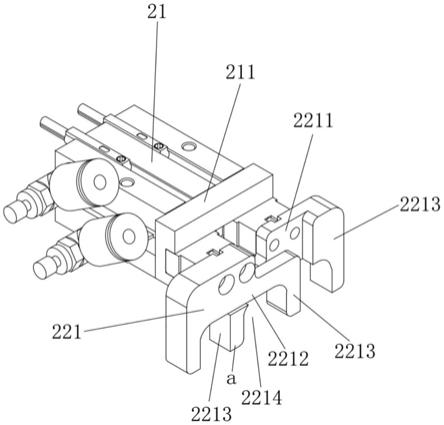
16.图2是本实用新型一种燃料电池极板抓取工装的夹爪机构的立体示意图;
17.图中:1固定机构;2夹爪机构;21伸缩气缸;22夹爪;221子爪;2211固定部;2212连接部;2213夹持柱;a夹取端;2214嵌位空间;211防撞挡块; 212伸缩杆;3定位机构。
具体实施方式
18.为使本实用新型的目的、技术方案和优点更加清楚,下面将结合附图对本实用新型实施方式作进一步地描述。
19.请参照图1至图2,本实用新型提供一种燃料电池极板抓取工装,用于抓取燃料电池,主要包括一固定机构1和二夹爪机构2,每一所述夹爪机构2均包括伸缩气缸21和与该伸缩气缸21的伸缩杆212连接的夹爪22,二所述伸缩气缸 21相互平行且分别固定于所述固定机构1上表面的对角区域,通过两所述伸缩气缸21调节二所述夹爪22之间的距离来实现对燃料电池的抓取和释放。
20.为了实现抓取的稳定性,每一所述夹爪22均包括二子爪221,每一所述子爪221均具有夹取端a,每一所述伸缩气缸21具有二伸缩杆212,每一所述伸缩杆212均与一所述子爪221连接。每一所述伸缩气缸21具有相互独立的二驱动机构,每一所述伸缩杆212均连接一所述驱动机构以被独立的驱动伸缩。即所述伸缩气缸21可以单独的控制其二伸缩杆212使同一所述夹爪22中的二所述子爪 221先后对燃料电池极板进行夹紧或者释放。
21.为了提高夹取的安全性,每一所述子爪221均包括与伸缩杆212固定连接的固定部2211、与所述固定部2211连接的连接部2212和位于所述连接部2212相对两端的二夹持柱2213,所述连接部2212的厚度小于所述夹持柱2213的厚度从而使同一所述子爪221的两夹持柱2213之间具有让位空间,所述夹持柱2213 的下端为所述夹取端a,同一所述子爪221中的一所述夹持柱2213为外夹持柱,另一所述夹持柱2213为内夹持柱,同一所述子爪221的二所述夹持柱2213之间具有嵌位空间2214,所述内夹持柱的高度小于所述嵌位空间2214的顶部高度,同一夹爪22中的二所述子爪221前后交叠设置且二让位空间至少局部重合,且一子爪221的内夹持柱伸入另一子爪221的嵌位空间2214。从而在同一夹爪22 的二所述子爪221在进行抓取和释放时,能够使燃料电池极板受力均匀,在不同的子爪221施加的抓取力不完全相同时,所述燃料电池极板亦能使应力分散从而保护燃料电池极板,使燃料电池极板被抓取后更加稳定和安全。
22.本实施例中,同一夹爪22中一子爪221的固定部2211的厚度与其连接部 2212的厚
度相等,该子爪221的连接部更加靠近所述伸缩气缸21,另一子爪221 的固定部2211的厚度与其夹持柱2213的厚度相等,所有夹持柱2213具有相同的厚度,同一所述夹爪22中二所述连接部2212的厚度之和等于夹持柱2213的厚度,优选一所述子爪221的连接部2212的厚度等于其夹持柱2213厚度的一半。
23.每一所述伸缩气缸21均固设有防撞挡块211,所述伸缩杆212穿过所述防撞挡块211后与所述夹爪22连接。具体地,所述防撞挡块211具有上防撞部与下防撞部,所述上防撞部的下端对准所述固定部2211,所述下防撞部对准所述内夹持柱的上端。
24.同时,所述固定机构1的上述两对角区域各具有一限位孔,所述夹取端a 穿过对应的限位孔且自所述固定机构1的下表面向下凸出,所述固定机构1为板状结构,其下表面为平面,所述夹爪22抓取电池极板时,所述固定机构1的下表面与电池极板的上表面接触,从而防止在抓取燃料电池极板时燃料电池变形。为了能够实现自动识别燃料电池所在位置,对燃料电池进行准确抓取,每一所述限位孔外侧的固定机构1的下表面均向下设有用于确定待夹取的电池极板位置的定位机构3。所述固定机构1固定于机械手。
25.在不冲突的情况下,本文中上述实施例及实施例中的特征可以相互结合。
26.以上所述仅为本实用新型的较佳实施例,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1