一种机器手定位机构的制作方法
1.本实用新型涉及工业机器人技术领域,具体是一种机器手定位机构。
背景技术:
2.机器手能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置,机器手是最早出现的工业机器人,也是最早出现的现代机器人,它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门,机器手定位机构是工业机器人的重要组成部分。
3.但是,现有的机器手定位机构存在以下不足;
4.1、现有的机器手定位机构大多是直接通过螺栓固定在底板或者地面上,机器手在工作时发生低频震动,低频震动传递到机器手底座时,会引起机器手底座与地面发生轻微碰撞,进而造成机器手不稳,使得机器手定位精确度变差。
5.2、现有的机器手定位机构结构简单,操作范围较小,不方便机器手对各个角度物品进行抓取。
技术实现要素:
6.本实用新型的目的在于提供一种机器手定位机构,以解决上述背景技术中提出的问题。
7.为实现上述目的,本实用新型提供如下技术方案:
8.一种机器手定位机构,包括旋转调节组件、减震座、竖向调节组件、横向调节组件和电动伸缩杆,所述旋转调节组件的底部四角位置安装有四个减震座,所述旋转调节组件的上端安装有竖向调节组件,所述竖向调节组件的安装有横向调节组件,所述横向调节组件上安装有电动伸缩杆,所述减震座包括座体、伸缩杆、顶板和橡胶柱,所述座体的上端靠近四角位置安装有四个伸缩杆,四个所述伸缩杆的顶端安装有顶板,所述顶板和座体之间设置有橡胶柱,所述橡胶柱的上下端分别与顶板和座体固定连接,所述旋转调节组件的一侧安装有plc控制器,所述旋转调节组件上安装有电箱。
9.作为本实用新型进一步的方案:所述旋转调节组件包括底板、防护罩、旋转杆、轴承、大传动齿轮、伺服电机、小传动齿轮和轴套,所述底板的上端安装有防护罩,所述防护罩内设置有旋转杆,所述旋转杆的底端与安装在底板上的轴承转动连接,所述旋转杆上安装有大传动齿轮,所述轴承的一侧设置有伺服电机,所述伺服电机的上部转轴端安装有小传动齿轮,所述小传动齿轮与大传动齿轮啮合,所述防护罩的顶端嵌入式安装有轴套,所述轴套与旋转杆过盈配合。
10.作为本实用新型再进一步的方案:所述竖向调节组件包括固定底板、固定顶板、滑杆、竖向丝杆、竖向丝杆轴承、第一联轴器、第一丝杆电机、竖向丝杆螺母和竖向滑块,所述固定底板和固定顶板上下对应设置,所述固定底板和固定顶板之间安装与两个滑杆,两个
所述滑杆之间设置有竖向丝杆,所述竖向丝杆的底端与安装在固定底板上的竖向丝杆轴承转动连接,所述竖向丝杆的顶端与安装在固定顶板上的第一联轴器连接,所述第一联轴器的上端安装有第一丝杆电机,所述第一丝杆电机的转轴通过第一联轴器与竖向丝杆传动连接,所述竖向丝杆上安装有竖向丝杆螺母,所述竖向丝杆螺母上安装有竖向滑块。
11.作为本实用新型再进一步的方案:所述横向调节组件包括横向槽框、横向丝杆、横向丝杆轴承、第二联轴器、第二丝杆电机、横向丝杆螺母和横向滑块,所述横向槽框与竖向滑块固定连接,所述横向槽框的内部设置有横向丝杆,所述横向丝杆的一端与安装在横向槽框一端内壁上的横向丝杆轴承转动连接,所述横向丝杆的另一端与安装在横向槽框另一端内壁上的第二联轴器连接,所述横向槽框的一端外壁上安装有第二丝杆电机,所述第二丝杆电机转轴通过第二联轴器与横向丝杆传动连接,所述横向丝杆上安装有横向丝杆螺母,所述横向丝杆螺母上安装有横向滑块,所述电动伸缩杆安装在横向滑块上。
12.作为本实用新型再进一步的方案:所述横向槽框的内底面和内顶面上均安装有限位滑轨,所述限位滑轨与开设在横向滑块上下两端的滑槽滑动配合。
13.作为本实用新型再进一步的方案:所述固定底板安装在旋转杆顶端,所述顶板的上部正中间位置安装有螺纹杆,所述螺纹杆插接在底板上,且螺纹杆的顶端安装有六角螺母,所述顶板通过螺纹杆和六角螺母与底板固定连接,所述座体的四角位置开设有固定孔。
14.作为本实用新型再进一步的方案:所述电箱通过导线与plc控制器电性连接,所述plc控制器通过导线分别与伺服电机、第一丝杆电机、第二丝杆电机和电动伸缩杆电性连接。
15.与现有技术相比,本实用新型的有益效果是:
16.1、本实用新型通过在旋转调节组件的底部四角位置安装减震座,减震座包括有橡胶柱和伸缩杆,当机器手运行产生震动时,震动波传递到减震座中的橡胶柱后会被橡胶柱有效吸收,同时橡胶柱会带动周围的四个伸缩杆伸缩,伸缩杆伸缩时内外杆体滑动摩擦消耗震动能量,从而使得传递到地面的震动更少,进而使得机器人在运行时更稳定。
17.2、本实用新型通过设置旋转调节组件、竖向调节组件、横向调节组件和电动伸缩杆,旋转调节组件能够使得机器手可以进行360
°
转动,实现对不同方向物品的抓取和搬运,同时竖向调节组件能够使机器手高度可调,实现对不同高度物品的抓取,横向调节组件能够使得机器手对远近不同的物品进行抓取,电动伸缩杆能够带动机械抓手进行升降,带动物品升降到达不同高度,通过旋转调节组件、竖向调节组件和横向调节组件的相互配合,使得机器手操作更灵活,操作范围更广。
附图说明
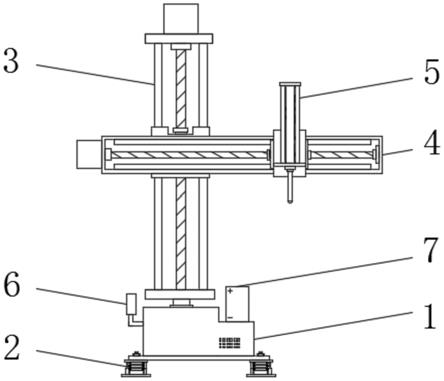
18.图1为一种机器手定位机构的整体结构示意图。
19.图2为一种机器手定位机构图1中旋转调节组件的结构示意图。
20.图3为一种机器手定位机构图1中减震座的结构示意图。
21.图4为一种机器手定位机构图1中竖向调节组件的结构示意图。
22.图5为一种机器手定位机构图1中横向调节组件的结构示意图。
23.1、旋转调节组件;101、底板;102、防护罩;103、旋转杆;104、轴承;105、大传动齿轮;106、伺服电机;107、小传动齿轮;108、轴套;2、减震座;201、座体;202、伸缩杆;203、顶
板;204、橡胶柱;205、螺纹杆;206、六角螺母;207、固定孔;3、竖向调节组件;301、固定底板;302、固定顶板;303、滑杆;304、竖向丝杆;305、竖向丝杆轴承;306、第一联轴器;307、第一丝杆电机;308、竖向丝杆螺母;309、竖向滑块;4、横向调节组件;401、横向槽框;402、横向丝杆;403、横向丝杆轴承;404、第二联轴器;405、第二丝杆电机;406、横向丝杆螺母;407、横向滑块;408、限位滑轨;5、电动伸缩杆;6、plc控制器;7、电箱。
具体实施方式
24.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
25.请参阅图1~5,本实用新型实施例中,一种机器手定位机构,包括旋转调节组件1、减震座2、竖向调节组件3、横向调节组件4和电动伸缩杆5,旋转调节组件1的底部四角位置安装有四个减震座2,旋转调节组件1的上端安装有竖向调节组件3,竖向调节组件3的安装有横向调节组件4,横向调节组件4上安装有电动伸缩杆5,减震座2包括座体201、伸缩杆202、顶板203和橡胶柱204,座体201的上端靠近四角位置安装有四个伸缩杆202,四个伸缩杆202的顶端安装有顶板203,顶板203和座体201之间设置有橡胶柱204,橡胶柱204的上下端分别与顶板203和座体201固定连接,旋转调节组件1的一侧安装有plc控制器6,plc控制器6型号为s7-200,旋转调节组件1上安装有电箱7。
26.旋转调节组件1包括底板101、防护罩102、旋转杆103、轴承104、大传动齿轮105、伺服电机106、小传动齿轮107和轴套108,底板101的上端安装有防护罩102,防护罩102内设置有旋转杆103,旋转杆103的底端与安装在底板101上的轴承104转动连接,旋转杆103上安装有大传动齿轮105,轴承104的一侧设置有伺服电机106,伺服电机106的上部转轴端安装有小传动齿轮107,小传动齿轮107与大传动齿轮105啮合,防护罩102的顶端嵌入式安装有轴套108,轴套108与旋转杆103过盈配合。
27.竖向调节组件3包括固定底板301、固定顶板302、滑杆303、竖向丝杆304、竖向丝杆轴承305、第一联轴器306、第一丝杆电机307、竖向丝杆螺母308和竖向滑块309,固定底板301和固定顶板302上下对应设置,固定底板301和固定顶板302之间安装与两个滑杆303,两个滑杆303之间设置有竖向丝杆304,竖向丝杆304的底端与安装在固定底板301上的竖向丝杆轴承305转动连接,竖向丝杆304的顶端与安装在固定顶板302上的第一联轴器306连接,第一联轴器306的上端安装有第一丝杆电机307,第一丝杆电机307的转轴通过第一联轴器306与竖向丝杆304传动连接,竖向丝杆304上安装有竖向丝杆螺母308,竖向丝杆螺母308上安装有竖向滑块309。
28.横向调节组件4包括横向槽框401、横向丝杆402、横向丝杆轴承403、第二联轴器404、第二丝杆电机405、横向丝杆螺母406和横向滑块407,横向槽框401与竖向滑块309固定连接,横向槽框401的内部设置有横向丝杆402,横向丝杆402的一端与安装在横向槽框401一端内壁上的横向丝杆轴承403转动连接,横向丝杆402的另一端与安装在横向槽框401另一端内壁上的第二联轴器404连接,横向槽框401的一端外壁上安装有第二丝杆电机405,第二丝杆电机405转轴通过第二联轴器404与横向丝杆402传动连接,横向丝杆402上安装有横
向丝杆螺母406,横向丝杆螺母406上安装有横向滑块407,电动伸缩杆5安装在横向滑块407上。
29.横向槽框401的内底面和内顶面上均安装有限位滑轨408,限位滑轨408与开设在横向滑块407上下两端的滑槽滑动配合。
30.固定底板301安装在旋转杆103顶端,顶板203的上部正中间位置安装有螺纹杆205,螺纹杆205插接在底板101上,且螺纹杆205的顶端安装有六角螺母206,顶板203通过螺纹杆205和六角螺母206与底板101固定连接,座体201的四角位置开设有固定孔207。
31.电箱7通过导线与plc控制器6电性连接,plc控制器6通过导线分别与伺服电机106、第一丝杆电机307、第二丝杆电机405和电动伸缩杆5电性连接。
32.本实用新型的工作原理是:
33.使用时,在plc控制器6的控制下,伺服电机106带动小传动齿轮107转动,小传动齿轮107通过与大传动齿轮105啮合带动旋转杆103缓慢转动,通过旋转杆103带动竖向调节组件3和横向调节组件4转动至需要的角度,然后通过第一丝杆电机307带动竖向丝杆304转动,通过竖向丝杆螺母308带动竖向滑块309沿两侧滑杆303竖向移动,进而带动横向调节组件4竖向移动,方便对物品进行升降控制,第二丝杆电机405启动带动横向丝杆402转动,通过横向丝杆螺母406带动横向滑块407沿上下限位滑轨408横向移动,进而可实现对物品的横向移动控制,机器手运行过程中产生震动时,震动波在向下传递到减震座2后,会被减震座2中的橡胶柱204有效吸收,同时设置在橡胶柱204四周的伸缩杆202会受到震动影响而上下伸缩,在伸缩杆202内外杆体相对滑动过程中,会不断消耗震动能量,使得震动逐渐减弱直至完全消失,从而进一步提高减震座2减震效果,使机器手运行更稳定。
34.尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1