一种便于操作的桁架式机械手及加工设备的制作方法
1.本实用新型涉及机械加工设备领域,特别是一种便于操作的桁架式机械手及加工设备。
背景技术:
2.目前市面上数控机床设备上的机械手装置普遍为以下几种,1、传统机械手普遍安装在机床的z轴上,不仅拆装主轴不方便,加工效率低,而且结构一般为双头同时取放,稳定性不足。2、通过工人手工操作,需停机方可取出工件,而且工件碎片容易对人体造成伤害,因此工件加工的全过程实际上属于半自动化操作,容易造成工伤事故也大大影响了加工效率。
3.综上,现有技术存在加工效率低、拆装难度大、稳定性差、安全性不足等技术缺陷,所述种种缺陷严重限制了本领域进一步向前发展及推广应用。
4.有鉴于此,本实用新型的目的在于提供一种新的技术方案以解决现存的技术缺陷。
技术实现要素:
5.为了克服现有技术的不足,本实用新型提供一种便于操作的桁架式机械手及加工设备,解决了现有技术存在的加工效率低、拆装主轴困难、稳定性及可靠性差、安全性不足等技术缺陷。
6.本实用新型解决其技术问题所采用的技术方案是:
7.一种便于操作的桁架式机械手,包括机架,所述机架上设置有x 轴移动模组,所述x轴移动模组的输出端设置有z轴移动模组,所述 z轴移动模组的输出端设置有旋转模组,所述旋转模组的输出端设置有机械臂模组,所述机械臂模组的输出端设置有吸盘模组,所述x轴移动模组可驱动所述z轴移动模组沿x轴方向移动,所述z轴移动模组可驱动所述旋转模组沿z轴方向升降移动,所述旋转模组可驱动所述机械臂模组旋转,所述机械臂模组可驱动所述吸盘模组转动,所述吸盘模组包括吸盘安装板及对称分布在吸盘安装板两侧的吸盘。
8.作为上述技术方案的进一步改进,所述x轴移动模组包括固定在机架上的x轴安装板及设置在x轴安装板上的x轴驱动电机、x轴丝杆螺母副、x轴导轨,所述x轴导轨上设置有x轴滑动安装板,所述 x轴丝杆螺母副的丝杆螺母固定连接所述x轴滑动安装板上,所述x 轴驱动电机的输出端连接到所述x轴丝杆螺母副的丝杆一端并可通过x轴丝杆螺母副驱动x轴滑动安装板在x轴导轨上沿x轴方向滑动,所述z轴移动模组安装在所述x轴滑动安装板上。
9.作为上述技术方案的进一步改进,所述x轴驱动电机通过x轴电机座安装在所述x轴安装板上,所述x轴丝杆螺母副的丝杆通过x轴丝杆安装座及轴承安装在x轴安装板上,x轴驱动电机的输出端通过 x轴联轴器连接到所述x轴丝杆螺母副的丝杆一端并可带动x轴丝杆螺母副的丝杆转动,所述x轴滑动安装板通过x轴滑座安装在x轴导轨上,所述x轴导轨
具有两根且分别设置在x轴安装板上表面及侧壁面。
10.作为上述技术方案的进一步改进,所述z轴移动模组包括固定安装在x轴移动模组输出端的z轴安装板及安装在z轴安装板上的z轴驱动电机、z轴丝杆螺母副、z轴导轨,所述z轴导轨上设置有z轴滑动安装座,所述z轴丝杆螺母副的螺母固连接到所述z轴滑动安装座上,所述z轴驱动电机的输出端连接到所述z轴丝杆螺母副的丝杆一端并可通过z轴丝杆螺母副驱动z轴滑动安装座在z轴导轨上滑动,所述旋转模组直接或间接地安装在所述z轴滑动安装座上。
11.作为上述技术方案的进一步改进,所述z轴安装板侧部设置有z 轴安装座,所述z轴驱动电机通过z轴电机座安装在所述z轴安装座上,所述z轴丝杆螺母副的丝杆一端通过z轴丝杆固定侧安装在所述 z轴安装座上,所述z轴驱动电机的输出端通过z轴联轴器连接到所述z轴丝杆螺母副的丝杆一端并可带动z轴丝杆螺母副的丝杆转动,所述z轴滑动安装座通过z轴滑座安装在z轴导轨上。
12.作为上述技术方案的进一步改进,所述z轴安装板上设置有缓冲胶垫,所述缓冲胶垫位于所述z轴导轨上方并用于缓冲所述z轴滑动安装座向上的冲击力,所述z轴滑动安装座下部固定连接有z轴升降臂,所述z轴升降臂具有两根且两根z轴升降臂的下部固定设置有z 轴下封板,所述旋转模组固定安装在所述z轴下封板底部,两根z轴升降臂之间还设置有用于安装线缆的伸缩筒。
13.作为上述技术方案的进一步改进,所述旋转模组包括固定在z轴移动模组输出端的旋转模组安装座,所述旋转模组安装座上设置有旋转驱动组件,所述机械臂模组安装在所述旋转驱动组件的输出端,旋转驱动组件可驱动机械臂模组转动,所述旋转模组安装座具有倾斜安装面板,所述倾斜安装面板与z轴或水平面均互成45度,所述旋转驱动组件安装在所述倾斜安装面板,旋转驱动组件的输出轴垂直于所述倾斜安装面板,所述旋转驱动组件包括旋转驱动电机及设置在旋转驱动电机输出端的旋转减速机,所述旋转减速机的输出轴为旋转驱动组件的输出端。
14.作为上述技术方案的进一步改进,所述机械臂模组包括固定安装在旋转模组输出端的机械臂安装座及设置在机械臂安装座上的机械臂架,所述机械臂架内部设置有吸盘驱动组件,所述吸盘模组安装在所述吸盘驱动组件的输出端。
15.作为上述技术方案的进一步改进,所述机械臂安装座具有一配合斜面并通过该配合斜面安装在旋转模组的输出端,所述配合斜面与水平面及z轴方向互成45度,所述吸盘驱动组件包括吸盘驱动电机及设置在吸盘驱动电机输出端的吸盘减速机,所述吸盘模组安装在所述吸盘减速机的输出轴上,吸盘减速机的输出轴与所述配合斜面互成 45度;
16.所述吸盘减速机通过吸盘电机座安装在所述机械臂架上,机械臂架包括机械臂底盖板、机械臂上盖板及连接在机械臂底盖板与机械臂上盖板之间的机械臂侧板,机械臂底盖板、机械臂上盖板及机械臂侧板的一端设置有机械臂上板并通过机械臂上板固定安装在机械臂安装座上。
17.本实用新型还提供了一种便于操作的加工设备,包括设备工作台及待加工料框、已加工料框,所述设备工作台上设置有用于加工工件的治具及所述的桁架式机械手。
18.本实用新型的有益效果是:本实用新型提供了一种便于操作的桁架式机械手及加工设备,该种便于操作的桁架式机械手及加工设备在 z轴移动模组上设置有旋转模组并在
旋转模组上设置机械臂模组,将吸盘模组安装在机械臂模组上,配合x轴移动模组及z轴模组,能够有效提升机械手的工作效率及自动化程度,动作效率更高,加工工件时稳定性更好,且减少了人工参与的过程,节省了人工成本,安全性更高。
19.综上,便于操作的桁架式机械手及加工设备解决了现有技术存在的加工效率低、拆装主轴困难、稳定性及可靠性差、安全性不足等技术缺陷。
附图说明
20.下面结合附图和实施例对本实用新型进一步说明。
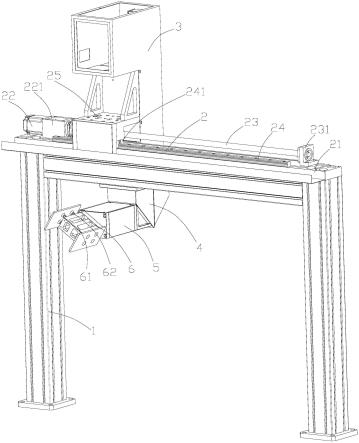
21.图1是本实用新型的装配示意图;
22.图2是本实用新型另一角度的装配示意图;
23.图3是本实用新型第三角度的装配示意图;
24.图4是本实用新型中z轴移动模组、旋转模组、机械臂模组及吸盘模组的结构拆分图。
具体实施方式
25.以下将结合实施例和附图对本实用新型的构思、具体结构及产生的技术效果进行清楚、完整地描述,以充分地理解本实用新型的目的、特征和效果。显然,所描述的实施例只是本实用新型的一部分实施例,而不是全部实施例,基于本实用新型的实施例,本领域的技术人员在不付出创造性劳动的前提下所获得的其他实施例,均属于本实用新型保护的范围。另外,专利中涉及到的所有联接/连接关系,并非单指构件直接相接,而是指可根据具体实施情况,通过添加或减少联接辅件,来组成更优的联接结构。本实用新型创造中的各个技术特征,在不互相矛盾冲突的前提下可以交互组合,参照图1-4。
26.一种便于操作的桁架式机械手,包括机架1,所述机架1上设置有x轴移动模组2,所述x轴移动模组2的输出端设置有z轴移动模组3,所述z轴移动模组3的输出端设置有旋转模组4,所述旋转模组4的输出端设置有机械臂模组5,所述机械臂模组5的输出端设置有吸盘模组6,所述x轴移动模组2可驱动所述z轴移动模组3沿x 轴方向移动,所述z轴移动模组3可驱动所述旋转模组4沿z轴方向升降移动,所述旋转模组4可驱动所述机械臂模组5旋转,所述机械臂模组5可驱动所述吸盘模组6转动,所述吸盘模组6包括吸盘安装板61及对称分布在吸盘安装板61两侧的吸盘62。
27.具体地,所述旋转模组4可驱动机械臂模组5在水平方向与垂直状态下切换,其中当机械臂模组5处于水平状态时,可配合吸盘模组 6在治具上上料、下料,当机械臂模组5处于垂直状态时,可配合吸盘模组6将加工好的工件放入料框或从料框中取出未加工的工件,
28.利用旋转模组4驱动机械臂模组5在上述两种状态中切换。
29.在x轴移动模组2中,所述x轴移动模组2包括固定在机架1上的x轴安装板21及设置在x轴安装板21上的x轴驱动电机22、x轴丝杆螺母副23、x轴导轨24,所述x轴导轨24上设置有x轴滑动安装板25,所述x轴丝杆螺母副23的丝杆螺母固定连接所述x轴滑动安装板25上,所述x轴驱动电机22的输出端连接到所述x轴丝杆螺母副23的丝杆一端并可通过x轴丝杆螺母副23驱动x轴滑动安装板 25在x轴导轨24上沿x轴方向滑动,所述z轴移动模组3安装在所述x轴滑动安装板25上;所述x轴驱动电机22通过x轴电机座221 安装在所述x轴安装板21
上,所述x轴丝杆螺母副23的丝杆通过x 轴丝杆安装座231及轴承安装在x轴安装板21上,x轴驱动电机22 的输出端通过x轴联轴器连接到所述x轴丝杆螺母副23的丝杆一端并可带动x轴丝杆螺母副23的丝杆转动,所述x轴滑动安装板25通过x轴滑座251安装在x轴导轨24上,所述x轴导轨24具有两根且分别设置在x轴安装板21上表面及侧壁面,x轴移动模组2外部可设置x轴外罩,用于防尘等。
30.实际应用时,x轴驱动电机22驱动z轴移动模组3、旋转模组4、机械臂模组5及吸盘模组6沿x轴方向移动。
31.在z轴移动模组3中,所述z轴移动模组3包括固定安装在x轴移动模组2输出端的z轴安装板31及安装在z轴安装板31上的z轴驱动电机32、z轴丝杆螺母副33、z轴导轨34,所述z轴导轨34上设置有z轴滑动安装座35,所述z轴丝杆螺母副33的螺母固连接到所述z轴滑动安装座35上,所述z轴驱动电机32的输出端连接到所述z轴丝杆螺母副33的丝杆一端并可通过z轴丝杆螺母副33驱动z 轴滑动安装座35在z轴导轨34上滑动,所述旋转模组4直接或间接地安装在所述z轴滑动安装座35上;所述z轴安装板31侧部设置有 z轴安装座36,所述z轴驱动电机32通过z轴电机座321安装在所述z轴安装座36上,所述z轴丝杆螺母副33的丝杆一端通过z轴丝杆固定侧331安装在所述z轴安装座36上,所述z轴驱动电机32的输出端通过z轴联轴器322连接到所述z轴丝杆螺母副33的丝杆一端并可带动z轴丝杆螺母副33的丝杆转动,所述z轴滑动安装座35 通过z轴滑座341安装在z轴导轨34上;所述z轴安装板31上设置有缓冲胶垫37,所述缓冲胶垫37位于所述z轴导轨34上方并用于缓冲所述z轴滑动安装座35向上的冲击力,所述z轴滑动安装座35 下部固定连接有z轴升降臂38,所述z轴升降臂38具有两根且两根 z轴升降臂38的下部固定设置有z轴下封板381,所述旋转模组4固定安装在所述z轴下封板381底部,两根z轴升降臂38之间还设置有用于安装线缆的伸缩筒39,所述z轴移动模组3外部设置有保护罩。
32.具体应用时,所述z轴驱动电机32可驱动旋转模组4、机械臂模组5及吸盘模组6沿z轴方向指向移动。
33.在旋转模组4中,所述旋转模组4包括固定在z轴移动模组3输出端的旋转模组安装座41,所述旋转模组安装座41上设置有旋转驱动组件,所述机械臂模组5安装在所述旋转驱动组件的输出端,旋转驱动组件可驱动机械臂模组5转动,所述旋转模组安装座41具有倾斜安装面板411,所述倾斜安装面板411与z轴或水平面均互成45 度,所述旋转驱动组件安装在所述倾斜安装面板411,旋转驱动组件的输出轴垂直于所述倾斜安装面板411,所述旋转驱动组件包括旋转驱动电机42及设置在旋转驱动电机42输出端的旋转减速机43,所述旋转减速机43的输出轴为旋转驱动组件的输出端,所述旋转模组 4外部设置有保护罩。
34.通过所述旋转驱动电机42的驱动作用,机械臂模组5可在水平与竖直两种状态下切换,动作效率高。
35.在机械臂模组5中,所述机械臂模组5包括固定安装在旋转模组 4输出端的机械臂安装座51及设置在机械臂安装座51上的机械臂架,所述机械臂架内部设置有吸盘驱动组件,所述吸盘模组6安装在所述吸盘驱动组件的输出端;所述机械臂安装座51具有一配合斜面511并通过该配合斜面511安装在旋转模组4的输出端,所述配合斜面511与水平面及z轴方向互成45度,所述吸盘驱动组件包括吸盘驱动电机52及设置在吸盘驱动电机52输出端的吸盘减速机53,所述吸盘模组6安装在所述吸盘减速机53的输出轴上,吸盘减速机 53的输
出轴与所述配合斜面511互成45度;所述吸盘减速机53通过吸盘电机座531安装在所述机械臂架上,机械臂架包括机械臂底盖板541、机械臂上盖板542及连接在机械臂底盖板541与机械臂上盖板542之间的机械臂侧板543,机械臂底盖板541、机械臂上盖板542 及机械臂侧板543的一端设置有机械臂上板55并通过机械臂上板55 固定安装在机械臂安装座51上。
36.基于上述的便于操作的桁架式机械手,本实用新型还提供了一种便于操作的加工设备,包括设备工作台及待加工料框、已加工料框,所述设备工作台上设置有用于加工工件的治具及所述的桁架式机械手。
37.在实际应用该种便于操作的桁架式机械手及加工设备,其动作原理为:
38.1、首先,所述机械臂模组5在所述旋转模组4的驱动下,旋转 180度,将所述机械臂45旋转至水平状态,所述吸盘模组6在吸盘驱动电机52的驱动下,也同时旋转90度,将所述吸盘模组6上的待加工玻璃工件71旋转至水平状态,在所述x轴移动模组2的驱动下,带动所述z轴移动模组3沿着x轴方向移动,直到将所述吸盘模组6 上的待加工玻璃工件71移动至工作台上方,进一步,在所述z轴驱动电机32的驱动下,所述z轴移动模组3向下移动,最终将所述吸盘模组6上的待加工玻璃工件71放置定位治具中;
39.2、在z轴驱动电机32的驱动下,所述z轴移动模组3向上移动,同时,所述x轴移动模组2带动z轴移动模组3在x轴方向移动,直到将所述吸盘模组6及待加工玻璃工件71移至待加工玻璃料框上方,到位后,在旋转模组4中的旋转驱动电机42的驱动作用下,所述机械臂模组5旋转至竖直状态,这个过程中,在吸盘驱动电机52的旋转作用下,所述吸盘模组6也同时旋转90度,将所述吸盘模组6旋转至竖直状态,进一步,所述z轴移动模组2向下移动,吸附待加工玻璃工件71;
40.3、进一步,在z轴驱动电机32的驱动作用下,所述z轴移动模组3向上移动,带动待加工玻璃工件71向上移动到指定位置,到达指定位置待命;
41.4、待工件加工完成后,在旋转模组4的旋转驱动下,所述机械臂模组5旋转180度将所述机械臂模组5旋转至水平状态,所述吸盘吸盘模组也同时旋转90度,将待加工玻璃工件71旋转至处于水平向上状态,吸盘模组6另一面空置的所述吸盘62处于向下状态,进一步,所述x轴移动模组2驱动所述z轴移动模组3在x轴方向移动,直至将所述吸盘模组6上的待加工玻璃工件71移动至工作台上方;然后,所述z轴移动模组3向下移动,利用吸盘模组6上空的吸盘 62吸附已加工玻璃工件72;已加工玻璃工件72被吸附后,所述z轴移动模组3再次向上移动,在吸盘驱动电机52的驱动作用下,所述吸盘模组6旋转180度,将另一面的待加工玻璃工件71旋转至向下状态,另一面的已加工玻璃72转动到向上的状态;进一步,所述z 轴移动模3向下移动,将另一块待加工玻璃工件71放置定位治具中;
42.5、待加工玻璃工件71放置到位后,所述z轴移动模组3向上移动,所述x轴移动模组2带动所述z轴移动模组3在x轴方向移动,将所述吸盘模组6上的已加工玻璃工件72移动至已加工玻璃料框上方,在所述旋转模4的旋转驱动下,所述机械臂模组5旋转180度并将所述机械臂模组5旋转至竖直状态;同时,在吸盘驱动电机52的驱动作用下,所述吸盘模组6也旋转90度,将所述吸盘模组6旋转至竖直状态,所述z轴移动模组3向下移动,将已加工玻璃工件72 放置已加工玻璃料框中;
43.6、进一步,所述z轴移动模组3再次向上移动,在旋转模组4 的旋转驱动下,所述机械臂模组5旋转180度并将所述机械臂模组5 旋转至水平状态,所述吸盘模组6也同时旋转
90度,将所述吸盘模组6旋转至水平状态,所述x轴移动模组2带动z轴移动模组3在x 轴方向移动,将所述吸盘模组6移至待加工玻璃料框上方,所述机械臂模组5通过所述旋转模组4旋转180度并将所述机械臂模组5旋转至竖直状态,所述吸盘模组6也同时旋转90度,将所述吸盘模组6 旋转至竖直状态,所述z轴移动模组3向下移动,吸附待加工玻璃工件71;
44.7、所述z轴移动模组3向上移动,在指定位置待命。
45.上述过程不断重复,就可以不断地实现待加工玻璃工件71的上料工作及已加工玻璃工件72的下料工作,具有动作迅速,工作效率高等优点。
46.以上是对本实用新型的较佳实施进行了具体说明,但本实用新型创造并不限于所述实施例,熟悉本领域的技术人员在不违背本实用新型精神的前提下还可做出种种的等同变形或替换,这些等同的变形或替换均包含在本技术权利要求所限定的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1