一种旋转机械手缓冲吸能装置的制作方法
1.本实用新型涉及机械手领域,具体涉及一种旋转机械手缓冲吸能装置。
背景技术:
2.随着中空成型机形式的演变,中空制品的形式多种多样,制品的取出方式也在不断改变。气动摆台在旋转机械手上应用不够普遍,主要是因为机械手臂在运动过程中运动惯量大、动能高,在机械手臂运动行程末端时传统的液压缓冲器不能有效的进行动能回收,导致机械手臂运行到末端时来回震动,不能有效停止。
技术实现要素:
3.本实用新型所要解决的技术问题是针对现有技术的机械手臂运行到末端时来回震动、不能有效停止的不足,提供一种旋转机械手缓冲吸能装置。
4.本实用新型解决上述技术问题的技术方案如下:
5.一种旋转机械手缓冲吸能装置,包括转动盘和设置在转动盘上的机械手臂,转动盘上设有用于驱动转动盘转动的气动摆台,其特征在于,还包括吸能装置,所述吸能装置包括固定连接在转动盘上端的固定套,固定套的上端内部螺接有压杆,固定套的下端以滑动结构方式插接有吸能柱,吸能柱的下端以滑动结构方式插接在转动盘内,压杆和吸能柱之间设有弹簧;吸能装置还包括设置在转动盘下方的吸能板,吸能板上设有与吸能柱转动轨迹相适配的两端浅中间深的弧形凹槽,吸能柱的底端抵接在凹槽内。
6.进一步的,包括具有支撑面的固定座,吸能板固定设置在支撑面上,气动摆台设置在支撑面的下方。
7.进一步的,所述气动摆台和转动盘之间通过回转支承相连接,回转支承的固定端固定连接在支撑面上。
8.进一步的,所述压杆上设有抬肩ⅰ,固定套内设有抬肩ⅱ,抬肩ⅰ和抬肩ⅱ相配合以限定压杆向上运动的最大行程。
9.进一步的,所述弹簧为矩形弹簧。
10.进一步的,所述固定套包括套筒,套筒的上端同轴心的固定连接有用于与压杆相螺接的螺母,套筒的下端设有法兰,套筒通过法兰固定连接在转动盘上。
11.进一步的,所述机械手臂远离转动盘的一端设有上下气缸和夹紧气缸。
12.本实用新型的有益效果是:
13.1.本实用新型通过设置吸能柱和吸能板,气动摆台带动机械手臂旋转即将到终点时,利用吸能柱与吸能板的之间的摩擦力进行最后的能量回收,实现机械手臂平稳停靠在终点,有效避免了机械手臂运行到末端时来回震动,结构简单有效、安装方便、制造成本低。
14.2.本实用新型通过设置压杆螺接在固定套内,可以依据预估的机械手旋转到终点所需动能,调整压杆高矮从而调节矩形弹簧的压缩量,进而调整摩擦力的大小。
15.3.本实用新型通过在吸能板上设置两端浅中间深的弧形凹槽,实现机械手臂工作
中的快速旋转不受阻碍,并能在机械手臂旋转靠近终点时平缓、稳定和有效的降速。
附图说明
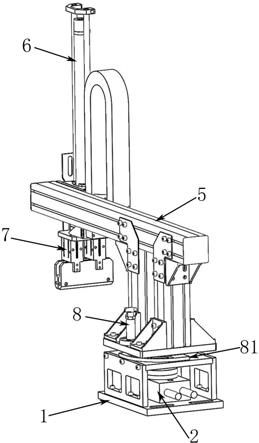
16.图1是本实用新型结构的立体示意图;
17.图2是本实用新型的后视图;
18.图3是本实用新型的右视图;
19.图4是图3所示a-a处的剖面视图;
20.图5是吸能柱和吸能板的结构示意图;
21.图中:1.固定座,2.气动摆台,3.转动盘,4.回转支承,5.机械手臂,6.上下气缸, 7.夹紧气缸,8.吸能装置,81.吸能板,82.吸能柱,83.固定套,84.弹簧,85.螺母,86.压杆。
具体实施方式
22.下面结合附图对本实用新型的原理和特征进行描述,所举实施例只用于解释本实用新型,并非用于限定本实用新型的范围。
23.如图1和图2所示,本实施例的一种旋转机械手缓冲吸能装置8,包括转动盘3和设置在转动盘3上的机械手臂5,转动盘3上设有用于驱动转动盘3转动的气动摆台2,进一步的,所述机械手臂5远离转动盘3的一端设有上下气缸6和夹紧气缸7。进一步的,本实用新型包括具有支撑面的固定座1,可选的,如图1所示,固定座1为矩形框架结构。进一步的,气动摆台2设置在支撑面的下方。进一步的,所述气动摆台2和转动盘3之间通过回转支承4相连接,回转支承4的固定端固定连接在支撑面上。
24.本实用新型还包括吸能装置8,如图4所示,所述吸能装置8包括固定连接在转动盘3上端的固定套83,固定套83的上端内部螺接有压杆86,优选的,所述压杆86上设有抬肩ⅰ,固定套83内设有抬肩ⅱ,抬肩ⅰ和抬肩ⅱ相配合以限定压杆86向上运动的最大行程。
25.固定套83的下端以滑动结构方式插接有吸能柱82,吸能柱82的下端以滑动结构方式插接在转动盘3内,压杆86和吸能柱82之间设有弹簧84,优选的,所述弹簧84为矩形弹簧;吸能装置8还包括设置在转动盘3下方的吸能板81,如图5所示,吸能板81上设有与吸能柱82转动轨迹相适配的两端浅中间深的弧形凹槽,吸能柱82的底端抵接在凹槽内。进一步的,吸能板81固定设置在固定座1的支撑面上。
26.作为一种可选的实施方式,所述固定套83包括套筒,套筒的上端同轴心的固定连接有用于与压杆86相螺接的螺母85,套筒的下端设有法兰,套筒通过法兰固定连接在转动盘3上。
27.本实用新型通过设置吸能柱82和吸能板81,气动摆台2带动机械手臂5旋转即将到终点时,利用吸能柱82与吸能板81的之间的摩擦力进行最后的能量回收,进一步的通过在吸能板81上设置两端浅中间深的弧形凹槽,实现机械手臂5工作中的快速旋转不受阻碍,并能在机械手臂5旋转靠近终点时平缓、稳定和有效的降速,实现机械手臂5平稳停靠在终点,有效避免了机械手臂5运行到末端时来回震动,结构简单有效、安装方便、制造成本低。而且使用时,可以依据预估的机械手旋转到终点所需动能,调整压杆86高矮从而调节矩形弹簧的压缩量,进而调整摩擦力的大小。
28.显然,上述实施例仅仅是为清楚地说明所作的举例,而并非对实施方式的限定。对
于所属领域的技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。而由此所引伸出的显而易见的变化或变动仍处于本实用新型创造的保护范围之中。
技术特征:
1.一种旋转机械手缓冲吸能装置,包括转动盘(3)和设置在转动盘(3)上的机械手臂(5),转动盘(3)上设有用于驱动转动盘(3)转动的气动摆台(2),其特征在于,还包括吸能装置(8),所述吸能装置(8)包括固定连接在转动盘(3)上端的固定套(83),固定套(83)的上端内部螺接有压杆(86),固定套(83)的下端以滑动结构方式插接有吸能柱(82),吸能柱(82)的下端以滑动结构方式插接在转动盘(3)内,压杆(86)和吸能柱(82)之间设有弹簧(84);吸能装置(8)还包括设置在转动盘(3)下方的吸能板(81),吸能板(81)上设有与吸能柱(82)转动轨迹相适配的两端浅中间深的弧形凹槽,吸能柱(82)的底端抵接在凹槽内。2.根据权利要求1所述的一种旋转机械手缓冲吸能装置,其特征在于,还包括具有支撑面的固定座(1),吸能板(81)固定设置在支撑面上,气动摆台(2)设置在支撑面的下方。3.根据权利要求2所述的一种旋转机械手缓冲吸能装置,其特征在于,所述气动摆台(2)和转动盘(3)之间通过回转支承(4)相连接,回转支承(4)的固定端固定连接在支撑面上。4.根据权利要求1所述的一种旋转机械手缓冲吸能装置,其特征在于,所述压杆(86)上设有抬肩ⅰ,固定套(83)内设有抬肩ⅱ,抬肩ⅰ和抬肩ⅱ相配合以限定压杆(86)向上运动的最大行程。5.根据权利要求1所述的一种旋转机械手缓冲吸能装置,其特征在于,所述弹簧(84)为矩形弹簧。6.根据权利要求1所述的一种旋转机械手缓冲吸能装置,其特征在于,所述固定套(83)包括套筒,套筒的上端同轴心的固定连接有用于与压杆(86)相螺接的螺母(85),套筒的下端设有法兰,套筒通过法兰固定连接在转动盘(3)上。7.根据权利要求1所述的一种旋转机械手缓冲吸能装置,其特征在于,所述机械手臂(5)远离转动盘(3)的一端设有上下气缸(6)和夹紧气缸(7)。
技术总结
本实用新型涉及机械手领域,具体涉及一种旋转机械手缓冲吸能装置。包括转动盘和设置在转动盘上的机械手臂,转动盘上设有用于驱动转动盘转动的气动摆台,还包括吸能装置,所述吸能装置包括固定连接在转动盘上端的固定套,固定套的上端内部螺接有压杆,固定套的下端以滑动结构方式插接有吸能柱,吸能柱的下端以滑动结构方式插接在转动盘内,压杆和吸能柱之间设有弹簧;吸能装置还包括设置在转动盘下方的吸能板,吸能板上设有与吸能柱转动轨迹相适配的两端浅中间深的弧形凹槽,吸能柱的底端抵接在凹槽内。本实用新型所要解决的技术问题是针对现有技术的机械手臂运行到末端时来回震动、不能有效停止的不足,提供一种旋转机械手缓冲吸能装置。能装置。能装置。
技术研发人员:张建群 戴强 程伟 吴正菲
受保护的技术使用者:山东通佳智能装备有限公司
技术研发日:2021.12.16
技术公布日:2022/5/17
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1