一种用于智能装配的6PUS-3RRR双平台设备
一种用于智能装配的6pus-3rrr双平台设备
技术领域
1.本技术属于自动加工与控制及机器人技术领域,具体涉及一种用于智能装配的6pus-3rrr双平台设备。
背景技术:
2.自动化装配是制造业中的重要技术,当前加工设备多依赖于传统机床,而装配工业则多依赖于人工。为提高工业生产过程中的装配效率,减小装配误差,同时提升制造业自动化水平,需要设计出精度高和速度快的自动化智能装配设备。此外,现存的自动装配设备自由度数量较少,大多难以完成复杂的、需要多方向运动的装配任务。
技术实现要素:
3.针对上述现有技术的缺点或不足,本技术要解决的技术问题是提供一种用于智能装配的6pus-3rrr双平台设备。
4.为解决上述技术问题,本技术通过以下技术方案来实现:
5.本技术提出了一种用于智能装配的6pus-3rrr双平台设备,包括:上平台以及下平台,所述上平台安装在所述下平台上;
6.所述上平台包括:多个pus支链,所述pus支链包括:移动副p副、万向节u副以及球副s副,所述万向节u副的一侧与所述移动副p副转动连接,所述万向节u副的另一侧还与所述球副s副转动连接;
7.所述下平台包括:多个rrr支链,每个所述rrr支链包括多个转动副r副串联;
8.所述下平台上还安装有承载平台。
9.可选地,上述的用于智能装配的6pus-3rrr双平台设备,其中,所述移动副p副包括:第一驱动电机、联轴器、第一导轨、滚珠丝杠以及第一滑块,所述第一驱动电机通过所述联轴器与安装在所述第一导轨上的滚珠丝杠连接并驱动所述滚珠丝杠转动并带动所述滚珠丝杠上的第一滑块上下移动,其中,所述第一滑块安装在所述滚珠丝杠上。
10.可选地,上述的用于智能装配的6pus-3rrr双平台设备,其中,还包括:连杆,所述连杆的第一端通过所述万向节u副与所述第一滑块连接;所述万向节u副包括两个旋转轴线相互正交的旋转副构成的万向节;
11.和/或,所述连杆的第二端与另一pus支链中的连杆的第二端与所述球副s副连接;所述球副s副包括三个旋转轴线相互正交且轴线相交于一点而构成的复合球铰;
12.和/或,在所述连杆的第二端与另一pus支链中的连杆的第二端之间还安装有轴承。
13.可选地,上述的用于智能装配的6pus-3rrr双平台设备,其中,所述第一导轨上还安装有电子限位开关。
14.可选地,上述的用于智能装配的6pus-3rrr双平台设备,其中,在所述上平台的底部还安装有六维力与力矩传感器;和/或,在所述六维力与力矩传感器的下端还安装有末端
执行器;和/或,在所述末端执行器上还安装有用于检测夹紧力的力传感器。
15.可选地,上述的用于智能装配的6pus-3rrr双平台设备,其中,所述转动副r副包括:第一r副、第二r副以及第三r副,其中,所述第一r副转动安装在第二机架上,所述第一r副通过内连杆传递旋转运动,所述内连杆通过第二r副与外连杆连接,所述外连杆通过第三r副与承载平台转动连接。
16.可选地,上述的用于智能装配的6pus-3rrr双平台设备,其中,所述下平台还包括:转动轴支撑座,多个所述第一r副安装在所述转动轴支撑座上;和/或,还包括:用于驱动多个所述第一r副转动的第二驱动电机;和/或,还包括:支撑架,所述支撑架用于安装所述第二驱动电机。
17.可选地,上述的用于智能装配的6pus-3rrr双平台设备,其中,多个所述第一r副的转动轴线相重合设置。
18.可选地,上述的用于智能装配的6pus-3rrr双平台设备,其中,所述上平台包括:6pus机构,所述6pus机构具有横向、纵向、上下的移动以及俯仰、偏航、滚转三个维度的转动自由度,即六个自由度;所述下平台包括:3rrr机构,所述3rrr机构具有横向移动、纵向移动和绕竖直方向转动,即三个自由度;所述双平台设备具有完备的空间九个自由度。
19.可选地,上述的用于智能装配的6pus-3rrr双平台设备,其中,所述上平台通过第一机架与箱体连接,所述箱体安装在所述下平台上;
20.和/或,所述下平台通过第二机架安装在电器柜上;
21.和/或,所述箱体内安装有第一驱动控制器、第一散热风扇以及第一传感器主板;
22.和/或,所述电器柜内安装有第二驱动控制器、第二散热风扇以及第二传感器主板;
23.和/或,所述电器柜采用封装箱体形式,其侧面还设置有外设接口、急停开关、状态显示灯以及电源和控制开关。
24.与现有技术相比,本技术具有如下技术效果:
25.本技术上平台和下平台具有多个自由度,可高精度,高效率地执行需要多个自由度方可完成的空间装配任务,在实际生产过程中,大量简单的装配任务需要被高精度地重复执行,例如常见的3c行业的内存条装卡、螺栓拧紧等工序,鼠标接收器与电池装配等均可以通过本实施例执行此类装配任务;本技术还具有自由度高、精度高,速度快,运动灵活,能够重复执行装配动作等优势;
26.在本技术中,上平台具有横向、纵向、上下的移动以及俯仰、偏航、滚转三个维度的转动的六个自由度,下平台具有横向移动、纵向移动和绕竖直方向转动共三个运动自由度。在具体应用时,装配对象和工件可放置于所述承载平台上,利用一定的工装固定装配母件。通过下平台的横向、纵向移动和绕竖直方向转动,可以以较高精度定位装配位置和取件位置。
附图说明
27.通过阅读参照以下附图所作的对非限制性实施例所作的详细描述,本技术的其它特征、目的和优点将会变得更明显:
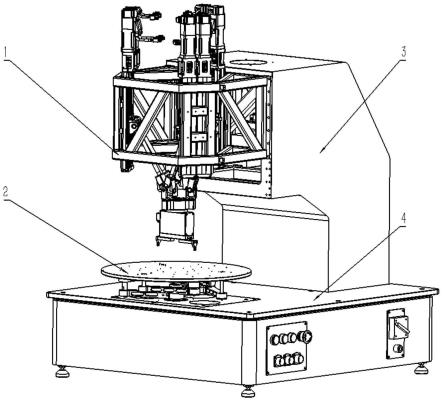
28.图1:本技术一实施例用于智能装配的6pus-3rrr双平台设备的结构示意图;
29.图2:本技术一实施例中上平台的结构示意图;
30.图3:本技术一实施例中下平台的结构示意图;
31.图4:本技术一实施例中6pus机构的坐标系结构图;
32.图5:本技术一实施例中6pus机构的单条支链的矢量闭环图;
33.图6:本技术一实施例中3rrr机构的运动示意图;
34.图7:本技术一实施例中3rrr机构的简图;
35.图8:本技术一实施例中3rrr机构的原理图。
具体实施方式
36.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
37.如图1至图3所示,在本技术的其中一个实施例中,一种用于智能装配的6pus-3rrr双平台设备,包括:上平台1以及下平台2,所述上平台1安装在所述下平台2上;
38.所述上平台1包括:多个pus支链,所述pus支链包括:移动副p副、万向节u副15以及球副s副17,所述万向节u副15的一侧与所述移动副p副转动连接,所述万向节u副15的另一侧还与所述球副s副17转动连接;
39.所述下平台2包括:多个rrr支链,每个所述rrr支链包括多个转动副r副串联;
40.所述下平台2上还安装有承载平台21。
41.本技术上平台1和下平台2具有多个自由度,可高精度,高效率地执行需要多个自由度方可完成的空间装配任务,在实际生产过程中,大量简单的装配任务需要被高精度地重复执行,例如常见的3c行业的内存条装卡、螺栓拧紧等工序,鼠标接收器与电池装配等均可以通过本实施例执行此类装配任务;本技术还具有自由度高、精度高,速度快,运动灵活,能够重复执行装配动作等优势。
42.进一步地,其中,上平台1具有横向、纵向、上下的移动以及俯仰、偏航、滚转三个维度的转动的六个自由度,下平台2具有横向移动、纵向移动和绕竖直方向转动共三个运动自由度。本实施例以上平台1具有六个自由度,下平台2具有三个自由度进行举例说明。
43.在具体应用时,装配对象和工件可放置于所述承载平台21上,利用一定的工装固定装配母件。通过下平台2的横向、纵向移动和绕竖直方向转动,可以以较高精度定位装配位置和取件位置。
44.具体地,所述上平台1优选地采用六个pus支链,即6pus机构,所述6pus机构具有横向、纵向、上下的移动以及俯仰、偏航、滚转三个维度的转动自由度,即完整的空间六自由度,分别有对应的六个下文所述的第一驱动电机26进行可控制。其六个自由度通过6个pus副构成的支链实现。
45.进一步地,在本实施例中,如图2所示,所述移动副p副包括:第一驱动电机11、联轴器12、第一导轨13、滚珠丝杠以及第一滑块14,所述第一驱动电机11通过所述联轴器12与安装在所述第一导轨13上的滚珠丝杠连接并驱动所述滚珠丝杠转动并带动滚珠丝杠上的第一滑块14上下运动,所述第一滑块14安装在所述滚珠丝杠上。其中,所述移动副p副为主动
副,由对应的所述第一驱动电机11通过所述联轴器12与安装在所述第一导轨13上的所述滚珠丝杠连接,从而驱动所述滚珠丝杠旋转,带动所述滚珠丝杠上的所述第一滑块14上下移动,并通过所述滚珠丝杠将旋转运动转化为直线移动。
46.可选地,所述第一滑块14优选地采用滑块螺母。
47.所述上平台1还包括:连杆110,所述连杆110的第一端通过所述万向节u副15与所述第一滑块14连接;所述万向节u副15包括两个旋转轴线相互正交的旋转副构成的万向节,即等效u副。其中,在本实施例中,所述万向节u副15的设置数量优选为六个。
48.可选地,所述连杆110的第二端与另一pus支链中的连杆110的第二端与所述球副s副17连接;所述球副s副17包括三个旋转轴线相互正交且轴线相交于一点而构成的复合球铰,即等效s副。上述的两两连杆110相互配合用于形成所述球副s副17,在本实施例中,所述球副s副17的设置数量优选为三个。
49.还需要说明地是,所述球副s副17并非传统的完整独立的s副。具体地,当三个转动副的转动轴线相交于一点时,在机构学上认为其运动表现以及计算方式均与s副等效,因此称为等效球铰副(s副)。
50.其中,在所述所述连杆110的第二端与另一pus支链中的连杆110的第二端之间还安装有轴承111,通过所述轴承111安装于所述所述球副s副17上。
51.所述第一导轨16上还安装有电子限位开关118,其用于检测第一滑块14移动的位置并保证其不超过运动范围。
52.在所述上平台1的底部还安装有六维力与力矩传感器112,其用于检测作业过程中产生接触时的接触力和接触力矩大小,上述设置可提高装配过程中的精度与效率,同时提高装配过程的容错性。通过所述六维力与力矩传感器112的设置,可在装配过程中通过检测到的力实时反馈并对装配过程加以控制。同时,可以在上平台1搭配视觉设备进行辅助视觉定位,进一步提高自动化装配水平。
53.在所述六维力与力矩传感器112的下端还安装有末端执行器-电动夹爪113,所述的电动夹爪113具有可控的张开与收缩功能。由于上平台1可以横向、纵向、上下的移动以及俯仰、偏航、滚转三个维度的转动,因此可控制所述的上平台1使末端执行器抓取和安放被装配件。
54.在所述末端执行器上还安装有用于检测夹紧力的力传感器114。
55.进一步可选地,在本实施例中,所述上平台1通过第一机架19与箱体3连接,所述箱体3安装在所述下平台2上。进一步地,可选地,所述箱体3内安装有第一驱动控制器、第一散热风扇以及第一传感器主板。
56.如图3所示,所述转动副r副包括:第一r副27、第二r副以及第三r副,其中,所述第一r副27转动安装在第二机架28上,所述第一r副27通过内连杆24传递旋转运动,所述内连杆24通过第二r副与外连杆22连接,所述外连杆22通过第三r副与承载平台21转动连接。其中,所述第一r副27为主动副,所述第二r副和所述第三r副为被动副。
57.进一步优选地,在本实施例中,所述转动副r副优选地设置有三个,其中,每个所述转动副r副由单独的且与其对应设置的第二驱动电机25驱动。进一步优选地,所述第二驱动电机25用于驱动所述第一r副27,其中,所述第一驱动电机还配置有与其匹配的第二传动皮带26。
58.所述第二r副包括但不限于:连接轴23,上述仅为举例说明。
59.进一步地,所述下平台2还包括:转动轴支撑座29,多个所述第一r副27安装在所述转动轴支撑座29上,所述转动轴支撑座29主要起安装支撑作用。
60.多个所述第一r副27的转动轴线相重合设置。进一步优选地,在本实施例中,所述第一r副27(主动副)设置有三个,三个所述第一r副27的转动轴线相重合设置,三个主动副分别独立的由其对应的第二驱动电机25进行驱动。
61.所述下平台2还包括:支撑架210,所述支撑架210用于安装所述第二驱动电机25。
62.其中,在本实施例中,三个所述第二驱动电机25对称120
°
分布,对应设计了三根对应与之对应的支撑架210。当然,所述支撑架210还可设置为一体成型结构。
63.进一步地,在本实施例中,所述下平台2通过第二机架28安装在电器柜4上,所述电器柜4内安装有第二驱动控制器、第二散热风扇以及第二传感器主板。
64.进一步可选地,所述电器柜4采用封装箱体3形式,其侧面还设置有外设接口、急停开关、状态显示灯以及电源和控制开关。
65.在执行装配任务时,对装配工件和被装配母件的定位,可根据确定的固定位置进行测量和定位,也可使用视觉定位设备。该九自由度双运动平台支持搭载工业视觉相机进行定位和工件检测,使装配流程更加智能化。
66.在本实施例中,所述上平台1包括:6pus机构,所述6pus机构具有横向、纵向、上下的移动以及俯仰、偏航、滚转三个维度的转动自由度,即六个自由度;所述下平台2包括:3rrr机构,所述3rrr机构具有横向移动、纵向移动和绕竖直方向转动,即三个自由度;所述双平台设备具有完备的空间九个自由度。所述双平台设备具有九个自由度。在执行装配任务时,对装配工件和被装配母件的定位,可根据确定的固定位置进行测量和定位,也可使用视觉定位设备。该九自由度双运动平台支持搭载工业视觉相机进行定位和工件检测,使装配流程更加智能化。
67.下文将对本实施例的控制过程进行详细说明。
68.首先,针对6pus机构的运动控制过程。
69.如图4和图5所示,为便于表达该6pus机构的运动学,取基坐标系中心o到基座上ci点的矢量为ci,移动副的运动方向的单位向量为ei,万向节到基座上ci点的距离为qi,也就是机构的驱动变量,万向节到球铰ai的杆长为li,矢量为li,基坐标系中心o到动坐标系中心o
′
的矢量为p。动坐标系中心o
′
到动平台上球副中心ai的矢量在动坐标系下表示为ai′
(这里将三个球副中心扩充为六个,是为了方便表达与计算,在进行理论计算时对计算结果没有影响。)另外,记基坐标系到动坐标系的旋转矩阵为r。
70.由图中的闭环可以得到矢量闭环方程:
71.p+ra
′i=ci+q
iei
+liꢀꢀꢀ
(1)
72.其中qi为待求的输出量,在化简后的公式中应保留。li的长度不变且方向不方便表示,可以通过取模利用其避免其计算其方向,令di=p+ra
′
i-ci,则矢量闭环方程可以被整理为:
73.li=d
i-q
iei
ꢀꢀꢀ
(2)
74.两边同时平方,可得:
75.76.求解一元二次方程组可得:
[0077][0078]
由上式可知,每一个末端位姿都对应两个不同的位移量,该六自由度并联机构由于设计参数、装配方式等因素限制,因此只需要考虑基于机构初始状态的一组解即可。代入机构的尺寸参数,以及末端姿态:x=[0 0 0 0 0 0]
t
,可得:
[0079][0080]
式(5)即为该6-pus并联机构单个支链的运动学反解。将i取为1~6即可得到各个支链的驱动量。
[0081]
其次,针对3rrr机构的运动控制过程。
[0082]
如图6至图8所示,3-rrr机构为平面运动机构,具有一个绕竖直方向的转动自由度和两个平面内的移动自由度,其原理图如图8所示(为便于描述,将共轴的三个主动副(第一r副27)分开绘制为ci),机构由3条第二支链组成,每条第二支链由三个转动副组成。建立下图中所示的平面基坐标系o
d-xy,并在末端平台上建立末端平面随动坐标系o
′
d-x
′y′
。
[0083]
设末端平台在基坐标系o
d-xy下的位姿为x=[x y θ],末端平台上由三个均匀分布转动副组成的圆形半径为a,基座上由三个均匀分布转动副组成的圆形半径为为b,驱动输入的转角分别为则末端平面随动坐标系o
′
d-x
′y′
下ai的坐标为:
[0084][0085]
则平面基坐标系o
d-xy下ci、bi与ai的坐标为:
[0086][0087]
依据机构的几何关系,知每条第二支链满足|a
ibi
|=|l2|,可得到如下关系式:
[0088][0089]
其中,各参数含义如下,x、y、θ、a、b为已知量:
[0090][0091]
d3=x-a sinθ
[0092]
e3=y+a cosθ-b
[0093][0094]
化简(7)式中各项得到的求解表达式:
[0095][0096]
由式(8)知3-rrr机构在某一确定位姿下每条第二支链的输入具有两解,对应分布于上图中a
ici
连线的两侧,具体求解取值时需根据连杆的初始位置确定。
[0097]
至此,通过几何关系计算得到了机构任意末端位姿对应的唯一驱动输入解,方程(8)即为3-rrr机构的运动学反解。
[0098]
本实施例6pus-3rrr系统运动学的工作原理如下所示。
[0099]
当上平台1为6pus机构,下平台2为3rrr机构时,上下平台2共具有九个运动自由度,冗余于空间六自由度。即有,当相对位姿为[x,y,z,α,β,γ]时,需将位姿对上下平台2进行分解。
[0100]
上平台16pus在特定的尺寸参数下,存在一个确定的灵巧工作空间,表述为:
[0101][0102]
因此,对于给定的相对位姿,需要对目标相对位姿进行判断,根据判断结果对位姿进行分配,从而使上下平台2根据分配的位姿进行求解。
[0103][0104]
根据式(9)与式(10),可以得到上平台1、下平台2在确定位姿下的运动分配规则为;
[0105]
①
目标x的分配:
[0106][0107]
②
目标y的分配:
[0108][0109]
③
目标z的分配:
[0110]z6pus
=z z
wl
≤z≤z
wu
[0111]
工作空间外,无法到达z≤z
wl
或z
wu
≤z
ꢀꢀꢀ
(13)
[0112]
④
目标α的分配:
[0113]
α
6pus
=α α
wl
≤α≤α
wu
[0114]
工作空间外,无法到达α≤α
wl
或α
wu
≤α
ꢀꢀꢀ
(14)
[0115]
⑤
目标β的分配:
[0116]
β
6pus
=β β
wl
≤β≤β
wu
[0117]
工作空间外,无法到达β≤β
wl
或β
wu
≤β
ꢀꢀꢀ
(15)
[0118]
⑥
目标γ的分配:
[0119][0120]
在确定的相对位姿下,式(11)到(16)提供了位姿分配方案,则根据上平台1、下平台2分配到的目标位姿,分别利用式(5)和式(8)进行求解,可得到上平台1、下平台2的各电机控制量,从而实现上平台1、下平台2的联合控制。
[0121]
本技术上平台1和下平台2具有多个自由度,可高精度,高效率地执行需要多个自
由度方可完成的空间装配任务,在实际生产过程中,大量简单的装配任务需要被高精度地重复执行,例如常见的3c行业的内存条装卡、螺栓拧紧等工序,鼠标接收器与电池装配等均可以通过本实施例执行此类装配任务;本技术还具有自由度高、精度高,速度快,运动灵活,能够重复执行装配动作等优势。
[0122]
在本技术的描述中,除非另有明确的规定和限定,术语“相连”、“连接”、“固定”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本技术中的具体含义。
[0123]
在本技术中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正下方和斜下方,或仅仅表示第一特征水平高度小于第二特征。
[0124]
在本实施例的描述中,术语“上”、“下”、“左”、“右”、等方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述和简化操作,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。此外,术语“第一”、“第二”仅仅用于在描述上加以区分,并没有特殊的含义。
[0125]
以上实施例仅用以说明本技术的技术方案而非限定,参照较佳实施例对本技术进行了详细说明。本领域的普通技术人员应当理解,可以对本技术的技术方案进行修改或等同替换,而不脱离本技术技术方案的精神和范围,均应涵盖在本技术的权利要求范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1