程序创建装置、程序以及机器人动作程序的制作方法
1.本发明涉及程序创建装置、程序以及机器人动作程序。
背景技术:
2.例如,如专利文献1所记载的那样,以往已知有一种程序自动创建装置,该程序自动创建装置创建用于使机器人执行对对象物的作业的动作程序。在本文献所记载的程序自动创建装置中,通过流程图创建作业的步骤,并基于创建的流程图自动生成动作程序。
3.专利文献1:日本特开2017-64844号公报
4.在机器人的作业中大多包含各种动作,在自动生成整体程序之后,用户有时对每个动作进行程序的修正。另外,如果修正预定动作的程序,则也需要在与该动作相关的其它动作中反映该修正。然而,由于整体程序通过程序自动创建装置自动生成,因此用户难以理解整体程序,难以将修正反映到其它动作中。
技术实现要素:
5.本发明的程序创建装置获取使机器人执行的作业顺序,并创建机器人动作程序,所述机器人动作程序包含:基于所述作业顺序的动作程序;能够切换有效或无效的执行模式;以及切换所述执行模式的有效或无效的指令。
6.本发明的程序获取使机器人执行的作业顺序,并创建机器人动作程序,所述机器人动作程序包含:基于所述作业顺序的动作程序;能够切换有效或无效的执行模式;以及切换所述执行模式的有效或无效的指令。
7.本发明的机器人动作程序包含:基于使机器人执行的作业顺序的动作程序;能够切换有效或无效的执行模式;以及切换所述执行模式的有效或无效的指令。
附图说明
8.图1是表示优选实施方式所涉及的机器人系统的整体结构的立体图。
9.图2是表示程序创建装置的框图。
10.图3是表示程序创建装置显示的画面的一例的图。
11.图4是表示程序创建装置显示的画面的一例的图。
12.图5是表示以往的问题点的框图。
13.图6是表示程序的一部分的图。
14.图7是表示程序的一部分的图。
15.图8是表示程序的一部分的图。
16.图9是表示程序的一部分的图。
17.附图标记说明
[0018]1…
机器人系统;2
…
机器人;21
…
基座;22
…
机械臂;221
…
臂;222
…
臂;223
…
臂;224
…
臂;225
…
臂;226
…
臂;23
…
末端执行器;3
…
机器人控制装置;4
…
程序创建装置;41
…
作业信息获取部;42
…
程序生成部;51
…
监视器;52
…
输入装置;231
…
研磨部件;c1
…
指令;c2
…
指令;c3
…
指令;c4
…
指令;e
…
编码器;j1
…
关节;j2
…
关节;j3
…
关节;j4
…
关节;j5
…
关节;j6
…
关节;m
…
电机;p
…
机器人动作程序;p0
…
动作程序;p11
…
机器人动作程序;p11
’…
机器人动作程序;p12
…
机器人动作程序;p21
…
机器人动作程序;p22
…
机器人动作程序;pf
…
程序;pf
’…
程序;pls
…
程序;pls
’…
程序;pp
…
程序;q
…
对象物;w1
…
窗口;w2
…
窗口。
具体实施方式
[0019]
以下,基于附图所示的优选实施方式,对本发明的程序创建装置、程序以及机器人动作程序进行详细说明。
[0020]
图1是表示优选实施方式所涉及的机器人系统的整体结构的立体图。图2是表示程序创建装置的框图。图3和图4分别是表示程序创建装置显示的画面的一例的图。图5是表示以往的问题点的框图。图6至图9分别是表示程序的一部分的图。
[0021]
在对自动创建机器人动作程序p的程序创建装置4进行说明之前,先对基于由程序创建装置4自动创建的机器人动作程序p来驱动的机器人系统1进行简单说明。如图1所示,机器人系统1具有机器人2以及基于机器人动作程序p控制机器人2的驱动的机器人控制装置3。
[0022]
机器人2是具有六个驱动轴的六轴机器人。机器人2具有基座21以及转动自如地连结于基座21的机械臂22,在机械臂22的前端部安装有末端执行器23。
[0023]
机械臂22是多个臂221、222、223、224、225、226转动自如地连结而成的机械臂,并且具备六个关节j1至j6。其中,关节j2、j3、j5是弯曲关节,关节j1、j4、j6是扭转关节。另外,在关节j1、j2、j3、j4、j5、j6上分别设置有电机m和编码器e。
[0024]
另外,在臂226上连接有末端执行器23。末端执行器23在臂226上装卸自如,能够选择适合于使机器人2执行的作业的末端执行器23来进行安装。本实施方式的末端执行器23具有旋转驱动的研磨部件231,机器人2执行使对象物q的表面平滑的研磨作业。
[0025]
以上,对机器人2进行了说明,但机器人2的结构没有特别限定。例如,机器人2也可以是scara机器人(水平多关节机器人)、双臂机器人等。另外,既可以将机器人2固定于地面等上而使其不可移动,也可以固定于无人搬运车(agv)等移动装置上而使其可移动。
[0026]
机器人控制装置3基于由程序创建装置4自动创建的机器人动作程序p来控制机器人系统1的驱动。
[0027]
机器人控制装置3例如由计算机构成,具有处理信息的处理器、可通信地连接于处理器的存储器、以及与外部装置进行连接的外部接口。存储器中保存着可由处理器执行的各种程序,处理器能够读取并执行存储于存储器中的各种程序等。
[0028]
以上,对机器人系统1进行了简单说明。接着,对创建机器人动作程序p的程序创建装置4进行说明。
[0029]
程序创建装置4例如由计算机构成,具有处理信息的处理器、可通信地连接于处理器的存储器、以及与外部装置进行连接的外部接口。存储器中保存着可由处理器执行的各种程序pp,处理器能够读取并执行程序pp。程序pp是自动创建机器人动作程序p的软件,安装了该软件的硬件成为程序创建装置4。
[0030]
如图2所示,这样的程序创建装置4具有作业信息获取部41和程序生成部42,作业信息获取部41获取与使机器人2执行的作业相关的信息,程序生成部42基于作业信息获取部41获取到的与作业相关的信息生成机器人动作程序p。另外,在程序创建装置4上连接有作为显示装置的监视器51以及键盘、鼠标等输入装置52。
[0031]
作为第一步骤,作业信息获取部41例如将图3所示的输入画面(图形用户界面)显示在监视器51的画面上,并经由输入装置52从用户接受使机器人2执行的动作。
[0032]
作为接受的动作,没有特别限定,在图3所示的例子中,用户能够将一个动作分配给一个“group”,并且能够针对每个group输入、指定表示末端执行器23的移动的起点和终点的“plist”、表示在“plist”中使用的坐标的“coordinate”、表示末端执行器23对对象物q的按压方向的“direction”、表示末端执行器23对对象物q的按压力的“force”、表示对象物q的硬度的“firmness”、表示末端执行器23的移动速度的“speed”、以及表示研磨部件231的旋转速度的“rpm”。在图3所示的例子中,用户创建了五个group,group0、group1、group2、group3、group4。
[0033]
另外,作业信息获取部41在接受到来自用户的动作之后,作为第二步骤,将如图4所示的输入画面(图形用户界面)显示在监视器51的画面上,并基于经由输入装置52的来自用户的指示创建作业顺序。此时,能够决定在第一步骤中设定的group0、group1、group2、group3、group4的执行顺序,并且还能够在连续的group之间插入其它动作。
[0034]
图4所示的作业顺序以group0、group1、group2、group3的顺序执行,并且,在执行group0之前,初始化配置于机械臂22上的未图示的力传感器,使末端执行器23移动至稍微远离group0的开始位置即p(300),在group1结束后等待5秒,然后开始group2。
[0035]
程序生成部42基于在第二步骤中基于来自用户的指示而创建的作业顺序来创建机器人动作程序p。创建的机器人动作程序p包含基于使机器人2执行的作业顺序的动作程序p0、能够切换有效或无效的执行模式、以及切换执行模式的有效或无效的指令。需要说明的是,作为执行模式,没有特别限定,例如可列举力控制模式、低速执行模式、逐次执行模式、低转矩模式、坐标系检查模式等。由于这些模式是在机器人2的驱动控制中经常使用的模式,因此成为便利性高的机器人动作程序p。
[0036]
其中,力控制模式是使机械臂22将来自上述力传感器的输出反馈至机器人2的驱动的模式。低速执行模式是例如在测试运转时等以预定速度以下缓慢地驱动机械臂22的模式。逐次执行模式是例如在测试运转时等,机器人2每结束一个动作就停止,在接受到来自用户的指示后开始下一动作的模式。低转矩模式是例如为了提高人共存侧机器人等的安全性而以预定转矩以下的小的转矩驱动机械臂22的模式。坐标系检查模式是例如向用户确认在机器人2的控制中使用的坐标系(设定于对象物q的本地坐标系、设定于末端执行器23的工具坐标系)是否正确的模式。
[0037]
需要说明的是,以下,为了便于说明,以机器人动作程序p包含力控制模式、低速执行模式、逐次执行模式、坐标系检查模式作为执行模式的情况为代表进行说明。
[0038]
根据这样的结构的机器人动作程序p,由于能够通过单个机器人动作程序p来管理多个执行模式,因此在修正某个执行模式所涉及的参数时,不需要考虑与其它执行模式的同步。换言之,如果修正某个执行模式所涉及的参数,则该修正也反映到其它执行模式中。
[0039]
具体而言,例如,如图5所示,在如力控制模式有效的机器人动作程序p11、力控制
模式无效的机器人动作程序p12、低速执行模式有效的机器人动作程序p21、低速执行模式无效的机器人动作程序p22那样对每个执行模式创建了不同的程序的情况下,例如,即使修正机器人动作程序p11中的参数使其成为机器人动作程序p11’,该修正也不会自动反映到其它机器人动作程序p12、p21、p22中。
[0040]
因此,为了实现同步,用户还必须对其它机器人动作程序p12、p21、p22的对应部分进行同样的修正。然而,并非所有用户对于程序都具有充分的知识,对于知识不充分的用户来说,不知道修正机器人动作程序p12、p21、p22的哪个部分才能实现同步,这使得修改变得非常困难且容易产生错误。
[0041]
与此相对,根据本实施方式的机器人动作程序p,如上所述,由于单个程序包含多个执行模式,因此如果修正机器人动作程序p中的参数,则也自动地同步到其它执行模式中。因此,即使是知识不充分的用户,也能够容易地进行机器人动作程序p的修正。
[0042]
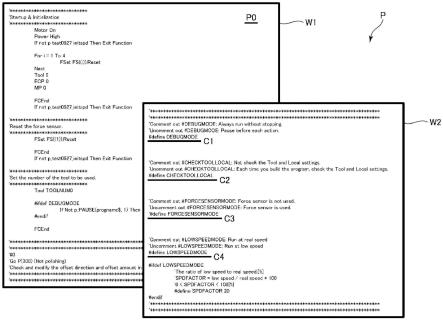
图6示出机器人动作程序p的一部分。如该图所示,在机器人动作程序p中,并列记载有选择逐次执行模式的有效/无效的指令c1、选择坐标系检查模式的有效/无效的指令c2、选择力控制模式的有效/无效的指令c3、以及选择低速执行模式的有效/无效的指令c4作为上述指令。例如,如果在各指令c1、c2、c3、c4的开头即“#”之前输入
“’”
,则各指令c1、c2、c3、c4被注释掉而变得无效,反之,如果从“#”之前删除
“’”
,则各指令c1、c2、c3、c4变得有效。
[0043]
因此,图6所示的状态为逐次执行模式=有效、坐标系检查模式=有效、力控制模式=无效、低速执行模式=有效。这样,由于在机器人动作程序p中,仅通过
“’”
的有无就能够选择各执行模式的有效/无效,因此即使是对于程序的知识不充分的用户也能够简单地切换执行模式的有效/无效。
[0044]
特别是,在本实施方式中,由于所有的指令c1、c2、c3、c4集中为一个而显示,因此用户能够容易地确认各执行模式的状态,并且能够选择其有效/无效。因此,成为易于操作的机器人动作程序p。需要说明的是,上述“集中为一个而显示”例如也可以说是在指令c1、c2、c3、c4之间没有与指令无关的记载的状态。
[0045]
并且,如图7所示,在本实施方式中,能够在与显示机器人动作程序p中包含的动作程序p0的窗口w1不同的窗口w2中显示指令c1、c2、c3、c4。另外,在窗口w2中实质上只显示指令c1、c2、c3、c4,由此,省去从机器人动作程序p中找出指令c1、c2、c3、c4的麻烦。因此,成为易于操作的机器人动作程序p。
[0046]
在此,图8示出动作程序p0中包含的力控制模式的部分。如该图所示,在动作程序中一并记载了力控制模式有效的情况下的程序pf以及无效的情况下的程序pf’,构成为如果在指令c3中力控制模式被设为有效,则选择程序pf,如果被设为无效,则选择程序pf’。同样地,图9示出动作程序中包含的低速执行模式的部分。如该图所示,在动作程序中一并记载了低速执行模式有效的情况下的程序pls以及无效的情况下的程序pls’,构成为如果在指令c4中低速执行模式被设为有效,则选择程序pls,如果被设为无效,则选择程序pls’。
[0047]
以上,对程序创建装置4、程序pp以及机器人动作程序p进行了说明。如上所述,这样的程序创建装置4获取使机器人2执行的作业顺序,并创建机器人动作程序p,该机器人动作程序p包含基于作业顺序的动作程序p0、能够切换有效或无效的执行模式、以及切换执行模式的有效或无效的指令c1、c2、c3、c4。根据这样的结构,由于在单个机器人动作程序p中
包含将执行模式设为有效时的程序和设为无效时的程序,因此如果修正机器人动作程序p中的参数,则也自动地同步到其它执行模式中。因此,即使是知识不充分的用户,也能够容易地进行机器人动作程序p的修正。
[0048]
另外,如上所述,作为执行模式,包含基于受到的力来控制机器人2的驱动的力控制模式、以预定速度以下驱动机器人2的低速执行模式、机器人2每结束一个动作就停止的逐次执行模式、以预定转矩以下驱动机器人2的低转矩模式、询问在机器人2的控制中使用的坐标系是否正确的坐标系检查模式中的至少一个。由此,成为便利性高的机器人动作程序p。
[0049]
另外,如上所述,机器人动作程序p具有多个执行模式,与各执行模式对应的多个指令c1、c2、c3、c4集中记载于机器人动作程序p中。由此,用户能够容易地确认各执行模式的状态,并且能够选择其有效/无效。因此,成为易于操作的机器人动作程序p。
[0050]
另外,如上所述,指令c1、c2、c3、c4在作为显示装置的监视器51的画面上显示在与基于作业顺序的动作程序p0不同的窗口w2中。由此,省去从机器人动作程序p中找出指令c1、c2、c3、c4的麻烦。因此,成为易于操作的机器人动作程序p。
[0051]
另外,如上所述,程序pp获取使机器人2执行的作业顺序,并创建机器人动作程序p,该机器人动作程序p包含基于作业顺序的动作程序p0、能够切换有效或无效的执行模式、以及切换执行模式的有效或无效的指令c1、c2、c3、c4。根据这样的结构,由于在单个机器人动作程序p中包含将执行模式设为有效时的程序和设为无效时的程序,因此如果修正机器人动作程序p中的参数,则也自动地同步到其它执行模式中。因此,即使是知识不充分的用户,也能够容易地进行机器人动作程序p的修正。
[0052]
另外,如上所述,机器人动作程序p包含基于使机器人2执行的作业顺序的动作程序p0、能够切换有效或无效的执行模式、以及切换执行模式的有效或无效的指令c1、c2、c3、c4。根据这样的结构,由于在单个机器人动作程序p中包含将执行模式设为有效时的程序和设为无效时的程序,因此如果修正机器人动作程序p中的参数,则也自动地同步到其它执行模式中。因此,即使是知识不充分的用户,也能够容易地进行机器人动作程序p的修正。
[0053]
以上,基于图示的实施方式对本发明的程序创建装置、程序以及机器人动作程序进行了说明,但本发明并不限定于此,各部的结构能够置换为具有同样功能的任意的结构。另外,也可以在本发明中附加其它任意的结构物。另外,也可以适当地组合各实施方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1