一种工业机器人机械夹爪性能检测装置
1.本发明涉及工业机器人检测领域,具体是一种工业机器人机械夹爪性能检测装置。
背景技术:
2.工业机器人是广泛用于工业领域的多关节机械手或多自由度的机器装置,具有一定的自动性,可依靠自身的动力能源和控制能力实现各种工业加工制造功能。工业机器人被广泛应用于电子、物流、化工等各个工业领域之中。
3.现有技术中,利用承重座的整体架构以及放置槽的内部放置空间,可在进行抓力实验的同时对抓力所能带动的力量进行实验,通过在放置槽内部放置重力物或者秤砣,对抓力或机械臂进行提拉力度实验,利用限力器与夹力杆的位置关系,可将机械爪夹住夹力板上方,通过夹力板拉动拉力杆从而做到夹爪抓力检测,同时利用橡胶块还可增加夹爪对夹力板的摩擦力,不会因打滑脱落造成装置损坏或影响抓力测试,利用限力器内部的拉力弹簧,可在进行抓力测试的同时更换或调整抓力度数,且利用有准确拉力度数的弹簧还可对抓力度数进行限定,但是现有技术不能够对不同开度的夹爪进行快速检测,所以现有技术有较大的改进空间。
技术实现要素:
4.本发明提供一种工业机器人机械夹爪性能检测装置,解决了上述背景技术中所提出的问题。
5.为实现上述目的,本发明提供如下技术方案:
6.一种工业机器人机械夹爪性能检测装置,包括底座,所述底座固定连接侧板;底座上设有滑槽;底座上位于滑槽内滑动连接滑板;滑板固定连接连接压板机构,压板机构用以带动滑板移动;连接压板机构固定连接高度调节机构;侧板固定连接拉力检测传感器;拉力检测传感器和滑板之间固定连接连接杆机构;滑板上设有压杆机构和限位杆机构,压杆机构用以驱动限位杆机构;连接杆机构上设有推杆机构和限位机构;限位杆机构用以驱动推杆机构,推杆机构用以驱动限位机构,限位机构用以实现连接杆机构相对位置的固定。
7.作为本发明的一种优选技术方案,所述压板机构包括固定于滑板上的第一转动座,第一转动座转动连接压板连杆,压板连杆转动连接第二转动座,第二转动座固定连接压板。
8.作为本发明的一种优选技术方案,所述高度调节机构包括固定于压板上的螺纹套筒,螺纹套筒螺纹连接螺纹杆。
9.作为本发明的一种优选技术方案,所述连接杆机构包括固定于拉力检测传感器上的连接套筒,连接套筒固定连接第一弹簧,第一弹簧远离连接套筒的一端固定连接滑块,滑块和连接套筒滑动连接,滑块固定连接连接杆,连接杆和滑板固定连接。
10.作为本发明的一种优选技术方案,所述压杆机构包括开设于滑板上的第一滑槽,
第一滑槽滑动连接第一斜块,第一斜块固定连接第二弹簧和压杆,第二弹簧和滑板固定连接,压杆穿过滑板,并与滑板滑动连接。
11.作为本发明的一种优选技术方案,所述限位杆机构包括开设于滑板上的第二滑槽,滑板内固定连接第三弹簧,第三弹簧固定连接第二斜块,第二斜块和滑板滑动连接。
12.作为本发明的一种优选技术方案,所述推杆机构包括开设于连接杆上的第三滑槽,连接杆上位于第三滑槽内滑动连接第三斜块,第三斜块固定连接推杆,推杆和连接杆滑动连接。
13.作为本发明的一种优选技术方案,所述限位机构包括固定于推杆上的安装块,安装块固定连接第三转动座,第三转动座转动连接转动杆,转动杆转动连接第四转动座,第四转动座固定连接移动板,移动板和滑块滑动连接,移动板固定连接限位板,连接套筒内开设有若干个限位槽,安装块和滑块之间固定连接第四弹簧。
14.本发明具有以下有益之处:本发明通过设置连接压板机构能够带动滑板沿滑槽移动,配合连接杆机构,从而适应不同夹持开度的夹爪检测,通过高度调节机构能够对不同长度的夹爪进行适应性调节,通过压杆机构能够对限位杆机构进行驱动,配合推杆机构能够对限位机构进行驱动,实现对连接杆机构进行限位固定,提高了工业机器人机械夹爪性能检测的效率。
附图说明
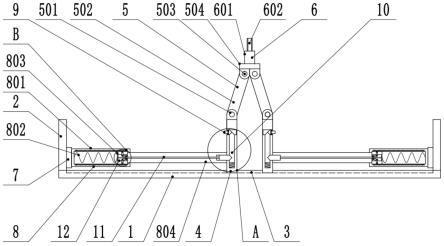
15.图1为一种工业机器人机械夹爪性能检测装置的结构示意图。
16.图2为图1中a区域的局部放大图。
17.图3为图1中b区域的局部放大图。
18.图4为工业机器人机械夹爪性能检测装置中滑板的结构示意图。
19.图中:1、底座;2、侧板;3、滑槽;4、滑板;5、压板机构;501、第一转动座;502、压板连杆;503、第二转动座;504、压板;6、高度调节机构;601、螺纹套筒;602、螺纹杆;7、拉力检测传感器;8、连接杆机构;801、连接套筒;802、第一弹簧;803、滑块;804、连接杆;9、压杆机构;901、第一滑槽;902、第一斜块;903、第二弹簧;904、压杆;10、限位杆机构;1001、第二滑槽;1002、第三弹簧;1003、第二斜块;11、推杆机构;1101、第三滑槽;1102、第三斜块;1103、推杆;12、限位机构;1201、安装块;1202、第三转动座;1203、转动杆;1204、第四转动座;1205、移动板;1206、限位板;1207、限位槽;1208、第四弹簧。
具体实施方式
20.以下结合附图对本发明的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本发明,并不用于限定本发明。
21.实施例1
22.请参阅图1-图4,一种工业机器人机械夹爪性能检测装置,包括底座1,所述底座1固定连接侧板2;底座1上设有滑槽3;底座1上位于滑槽3内滑动连接滑板4;滑板4固定连接连接压板机构5,压板机构5用以带动滑板4移动;连接压板机构5固定连接高度调节机构6;侧板2固定连接拉力检测传感器7;拉力检测传感器7和滑板4之间固定连接连接杆机构8;滑板4上设有压杆机构9和限位杆机构10,压杆机构9用以驱动限位杆机构10;连接杆机构8上
设有推杆机构11和限位机构12;限位杆机构10用以驱动推杆机构11,推杆机构11用以驱动限位机构12,限位机构12用以实现连接杆机构8相对位置的固定。
23.所述压板机构5包括固定于滑板4上的第一转动座501,第一转动座501转动连接压板连杆502,压板连杆502转动连接第二转动座503,第二转动座503固定连接压板504。所述连接杆机构8包括固定于拉力检测传感器7上的连接套筒801,连接套筒801固定连接第一弹簧802,第一弹簧802远离连接套筒801的一端固定连接滑块803,滑块803和连接套筒801滑动连接,滑块803固定连接连接杆804,连接杆804和滑板4固定连接,具体的,随着压动压板504,在压板连杆502的连接下,使得滑板4沿滑槽3向两边移动,进而使得滑块803沿连接套筒801移动,随着滑板4向两边移动,此时滑板4会抵在夹爪上。
24.所述压杆机构9包括开设于滑板4上的第一滑槽901,第一滑槽901滑动连接第一斜块902,第一斜块902固定连接第二弹簧903和压杆904,第二弹簧903和滑板4固定连接,压杆904穿过滑板4,并与滑板4滑动连接。所述限位杆机构10包括开设于滑板4上的第二滑槽1001,滑板4内固定连接第三弹簧1002,第三弹簧1002固定连接第二斜块1003,第二斜块1003和滑板4滑动连接。所述推杆机构11包括开设于连接杆804上的第三滑槽1101,连接杆804上位于第三滑槽1101内滑动连接第三斜块1102,第三斜块1102固定连接推杆1103,推杆1103和连接杆804滑动连接。所述限位机构12包括固定于推杆1103上的安装块1201,安装块1201固定连接第三转动座1202,第三转动座1202转动连接转动杆1203,转动杆1203转动连接第四转动座1204,第四转动座1204固定连接移动板1205,移动板1205和滑块803滑动连接,移动板1205固定连接限位板1206,连接套筒801内开设有若干个限位槽1207,安装块1201和滑块803之间固定连接第四弹簧1208,具体的,当夹爪抵在压杆904后,此时压杆904带动第一斜块902向滑板4内收缩,第一斜块902顶动第二斜块1003,第二斜块1003则顶动第三斜块1102远离第二斜块1003,在推杆1103的作用下,使得安装块1201向第四弹簧1208方向运动,在转动杆1203和移动板1205的作用下,使得限位板1206卡在限位槽1207内,从而完成滑块803位置的限位固定,用以完成对滑板4位置的限位固定,此时能够开启夹爪,实现对夹持力进行检测。
25.实施例2
26.请参阅图1-图4,本实施例的其它内容与实施例1相同,不同之处在于:所述高度调节机构6包括固定于压板504上的螺纹套筒601,螺纹套筒601螺纹连接螺纹杆602,具体的,转动螺纹杆602,能够控制螺纹杆602伸出螺纹套筒601的长度。
27.本发明在实施过程中,首先所要检测批次的夹爪长度不同对高度调节机构6的高度进行调节,当夹爪向下运动时,此时会压动高度调节机构6,高度调节机构6则会驱动压板机构5,压板机构5使得滑板4向两侧移动,进而使得滑板4贴合在夹爪上,当滑板4抵在夹爪后,此时会压动压杆机构9,压杆机构9则会驱动限位杆机构10发生位置变动,限位杆机构10位置变动会带动推杆机构11同步位置变动,通过推杆机构11使得限位机构12被驱动,用以实现连接杆机构8相对位置的固定,此时开启夹爪,对滑板4进行夹动,在滑板4和连接杆机构8的带动下,通过拉力检测传感器7实现对夹爪进行夹持力进行快速检测。
28.本发明通过设置连接压板机构5能够带动滑板4沿滑槽3移动,配合连接杆机构8,从而适应不同夹持开度的夹爪检测,通过高度调节机构6能够对不同长度的夹爪进行适应性调节,通过压杆机构9能够对限位杆机构10进行驱动,配合推杆机构11能够对限位机构12
进行驱动,实现对连接杆机构8进行限位固定,提高了工业机器人机械夹爪性能检测的效率。
29.最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1