一种欠驱动灵巧手指的运动学解算方法
本发明涉及机器人领域,具体地说是一种欠驱动灵巧手指的运动学解算方法。
背景技术:
1、手是人体中最灵活的运动结构,人类精细灵活的操作离不开手的参与,无论是具有不规则外形的复杂物体,还是细小轻微的物体,人类都能够通过多手指的协同运动实现对物体精准可靠的抓握和操作,因此机器人多指灵巧手也成为机器人领域的研究热点之一。
2、对于多指灵巧手的设计,若采用全驱动的方案——即执行器数目与手指自由度数目相等,虽然可以做到系统完全可控稳定,但会导致20个以上的主动自由度,系统的整体集成性太差,所需要的控制关节与执行器众多,尤其是针对驱动电机直接放置在手指关节的方案,手指往往多倍于正常人手指大小,不具有很好的拟人性,同时电机在手指关节处,导致手指缺乏抵抗外界冲击的柔性,外界一次较大的冲击往往意味着损坏一个关节电机,大量的执行器也导致全驱动的灵巧手指控制复杂,成本过高。因此目前对于灵巧手指的设计多采用欠驱动的方案,而在驱动方式上tendon driven(线驱动)给灵巧手这样一个狭小、精密空间的传动设计上带来了极大的灵活性,同时可以将执行器后移降低手指质量,减小手指惯性,并增加手指抵抗外界冲击的柔性。
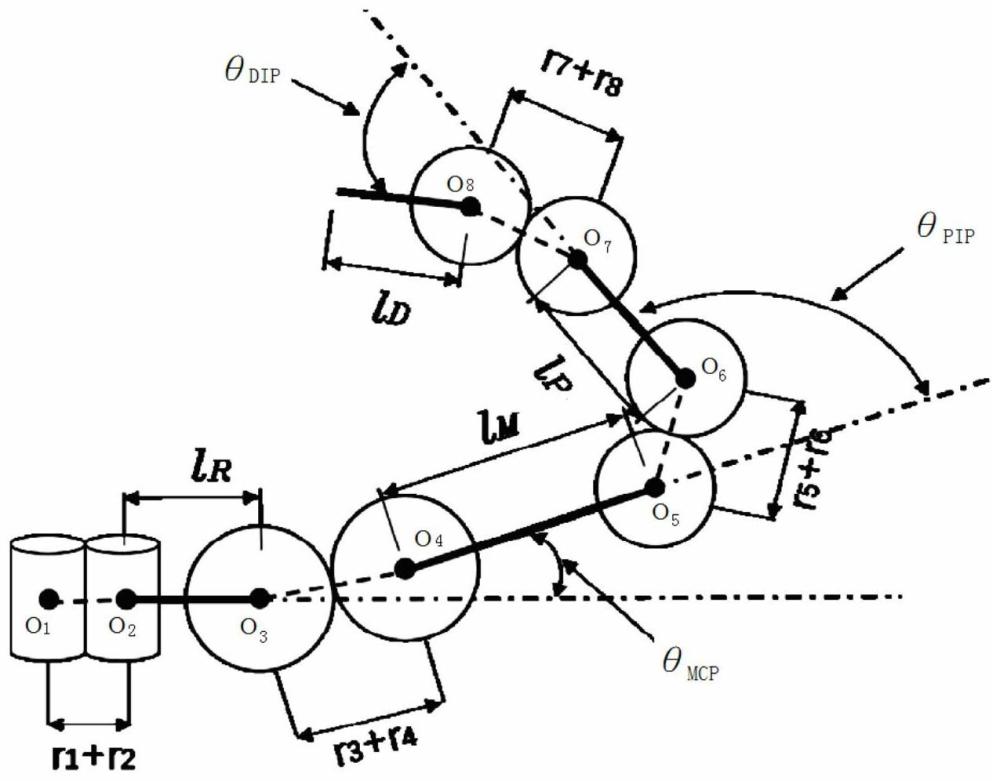
3、但欠驱动手指由于其执行器数目少于自由度数目,运动学解算十分困难,运动控制也较为复杂,这些问题一直是制约灵巧手应用的瓶颈问题,其中如何对欠驱动手指进行运动学建模更是解决控制问题的前提,所以准确合适的运动学建模对于欠驱动手指的控制就显得尤为重要。目前对于灵巧手指的研究往往参照人类的手指特点,人类手指除拇指外,每个手指都具有四个指骨:掌骨、近端、中间和远端指骨,因此如图1所示,灵巧手指各个关节一般被命名为掌指关节(mcp)、近端指间关节(pip)和远端指间关节(dip),分别有2、1和1个自由度,如果受控手指采用线驱动(左、中、右驱动绳,每个驱动绳对应一个直线电机)的欠驱动设计方案且设计完全拟人化,则手指一般采用四块指骨通过线绳串接的非固联式拼接方式连在一起,而如图2所示,对于单个关节而言,其发生转动时不是同轴转动,会同时具有旋转和移动两种运动形式,因此无法使用传统的铰链式运动学解算方案,并且由于线绳的柔性特点,这对于运动学模型的建立和后续的控制都具有不小的挑战。
技术实现思路
1、本发明的目的在于提供一种欠驱动灵巧手指的运动学解算方法,其利用虚拟连杆对欠驱动灵巧手指进行运动学建模,解决了手指非固联关节在转动时发生的滚动问题,从而能够定量描述驱动绳长和关节角之间的映射关系,实现了对手指实时且可视化的控制效果。
2、本发明的目的是通过以下技术方案来实现的:
3、一种欠驱动灵巧手指的运动学解算方法,包括如下步骤:
4、步骤一、利用旋转关节分别描述侧摆关节、掌指关节mcp、近端指间关节pip、远端指间关节dip运动状态,且任意一对旋转关节两圆心连线设为虚拟连杆;
5、步骤二、根据手指参数建立改进型d-h参数表,参数包括连杆长度ai-1、连杆扭角αi-1、连杆偏距di和关节角θi,其中关节角θ1~θ8与侧摆关节角θroll、掌指关节角θmcp、近端指间关节角θpip和远端指间关节角θdip对应关系为:
6、θ1+θ2=θroll
7、θ3+θ4=θmcp
8、θ5+θ6=θpip
9、θ7+θ8=θdip (2);
10、通过变换矩阵获得手指指尖的位姿且所述指尖位姿矩阵为θroll、θmcp、θpip三个变量的函数;
11、步骤三、获得掌指关节角θmcp与对应驱动绳收缩量lmcp关系,进而获得对应电机控制的位置长度pmcp;
12、步骤四、获得侧摆关节角θroll与对应驱动绳收缩量的lroll关系,进而获得对应电机控制的位置长度proll;
13、步骤五、关节角θroll和关节角θmcp通过左、右驱动绳驱动,根据pmcp和proll获得左右两个直线电机的实际控制位置长度pleft和pright:
14、pleft=pleft(0)-pmcp-proll
15、pright=pright(0)-pmcp+proll (11);
16、步骤六、获得近端指间关节角θpip与对应驱动绳收缩量的lpip关系,进而获得对应电机控制的位置长度ppip;
17、步骤七、关节角θpip通过中驱动绳驱动,根据ppip获得中间直线电机驱动的实际控制位置长度pcenter:
18、pcenter=pcenter(0)-ppip (14);
19、步骤八、确定手指期望关节角θmcp、θroll、θpip并输入系统,系统根据步骤一至步骤七解算获得指尖目标位姿矩阵以及各个直线电机的控制位置pleft、pright、pcenter用于控制手指运动。
20、步骤二中:用变换矩阵的乘积来表示:
21、
22、而关节角θ1~θ8与侧摆关节角θroll、掌指关节角θmcp、近端指间关节角θpip和远端指间关节角θdip对应关系为:
23、θ1+θ2=θroll
24、θ3+θ4=θmcp
25、θ5+θ6=θpip
26、θ7+θ8=θdip (2);
27、上式(2)中;
28、
29、
30、
31、
32、上式(3)中,ri为对应旋转关节对应圆半径;
33、而θdip=α*θpip (4);
34、上式(4)中,比例系数α恒等于2/3;
35、将上式(2)~(4)代入变换矩阵式(1),求得指尖位姿矩阵为θroll、θmcp、θpip三个变量的函数:
36、
37、上式(5)中:
38、
39、
40、
41、r12=-s(θroll),
42、r22=c(θroll),
43、r32=0,
44、
45、
46、
47、
48、
49、
50、上组式(6)中s代表sin,c代表cos,ai由改进型d-h参数表获得。
51、步骤三中,掌指关节转动依靠左右两个直线电机同时收缩拉动左、右驱动绳驱动,所述左驱动绳和右驱动绳上均设有吊索与掌指指骨连接,吊索始终处于绷紧状态长度不变,受吊索约束,在转动的过程驱动绳与掌指指骨之间夹角θ保持不变,而掌指指骨上的线孔h位置和关节端旋转关节两圆圆心o3、o4相对位置固定,因此h与旋转关节两圆间切点距离不变,同时h和旋转关节两圆间切点连线,该连线与驱动绳之间的夹角α也保持不变,驱动绳收缩lmcp长度后,旋转关节两圆间切点视为沿o3圆弧移动lmcp长度,则有:
52、lmcp=θmcp*r3 (7);
53、上式(7)中,r3为o3圆半径;
54、对应直线电机收缩的位置长度pmcp为:
55、
56、上式(8)中,m为直线电机最大工作空间除以路点总数后获得的一个路点对应距离。
57、步骤四中,左右两个直线电机驱动左、右驱动绳差动运动产生侧摆关节角θroll,其中侧摆关节上的输入线孔与对应旋转关节两圆圆心o1o2连线之间的垂线长度为rr,交点为or,以or为圆心、rr为半径做虚拟圆,输入线孔在所述虚拟圆上的位置变化弧长近似等于驱动绳收缩长度,则有:
58、lroll=θroll*rr (9);
59、对应直线电机收缩的位置长度为:
60、
61、步骤六中,驱动绳末端绑在近端指间关节上形成绳结,关节端旋转关节两圆o5o6之间的初始切点为op,关节初始位置到op之间距离为rp,以op为圆心、rp为半径做圆弧,在该圆弧上绳结所走的弧长等效为驱动绳收缩的长度lpip,则有:
62、lpip=θpip*rp (12);
63、对应直线电机收缩的位置长度为:
64、
65、步骤八中,控制系统包括用于实时解算的上位机和控制各个直线电机的下位机,所述上位机设有屏幕,所述下位机设有控制器。
66、先在上位机输入期望的关节角θmcp、θroll、θpip,并根据步骤一至步骤七解算出三个直线电机的控制位置pleft、pright、pcenter以及指尖目标位姿矩阵发送至下位机的控制器,控制器控制各个直线电机到达目标位置,同时控制器回传当前直线电机的状态到上位机,经上位机解算获得手指实时θmcp、θroll、θpip角度,进而获得实时的手指位姿在屏幕上展示。
67、控制器以固定时间间隔向直线电机发送目标位置,并通过pd反馈控制直线电机精准到达目标位置。
68、本发明的优点与积极效果为:
69、1、本发明利用虚拟连杆对欠驱动灵巧手指进行运动学建模,尤其针对线驱动非固联式手指,能够很好的解决非固联关节在转动时发生的滚动问题,能够定量描述绳长和关节角之间的映射关系,因此能够通过各个手指关节角求出此关节角状态下手指指尖的位姿以及要到达此状态下需要下发到控制器的直线电机位置信息pleft、pright、pcenter,从而可以实现对手指实时且可视化的控制效果。
70、2、本发明考虑到作为传动介质的线绳具有强柔性,在运动过程中其轨迹十分复杂,于是将手指运动的关节角(弧长)和绳长近似为线性关系,在不影响控制效果的同时,也起到很好的简化模型的作用。
71、3、本发明采用上下位机协同控制的方式充分发挥上下位机的优势,在上位机端进行大量的数据解算并提供简单友好的可视化操作界面,方便对手指实现简单直观的控制,下位机端直接和直线电机相连,通过闭环控制实现对手指关节的实时运动控制。
- 还没有人留言评论。精彩留言会获得点赞!