一种基于目标定位智能巡检机器人的制作方法
本发明提供一种基于目标定位智能巡检机器人,属于巡检机器人领域。特别涉及一种用于结合图像识别系统进行巡检的机器人移动部。
背景技术:
1、目前,一般地面移动机器人的运动机构主要有三种:轮式移动机构、履带式移动机构和腿足式移动机构。腿足式移动机构虽然环境适应性强,但结构复杂,成本较高,相比轮式移动机构,履带式运动机构适合更多的复杂环境,比如爬楼梯,越野能力等,比腿足式机构,具有结构简单,速度快的特点,应用非常广泛,但是也只能翻越小型障碍物,当地面上有垂直的或者坡度较大的障碍物时履带无法越过阻挡物,现有的行走结构单一,不能够兼顾多种结构,且整体扭矩传输效率低。
2、公开号cn215794121u公开了一种机器人的多段式履带行走底座组件,包括侧板、高度调节机构和行走机构,四块侧板,均固定设置在底盘每一侧的底部,其中两块所述侧板上均呈水平状态固定设置有距离检测机构,若干组高度调节机构,均呈竖直状态固定设置在底盘的底部,每组所述高度调节机构包括升降安装板,所述升降安装板的长度方向上均固定设置有保护侧板,若干组行走机构,均固定设置在升降安装板的底部,上述结构的接近角、离去角固定,不能够快速的进行调节。
技术实现思路
1、本发明一种基于目标定位智能巡检机器人,提供的一种通过前后设置翻转的支撑架,进行接近角、离去角调节的巡检机器人行走结构。结构简单,使用方便。
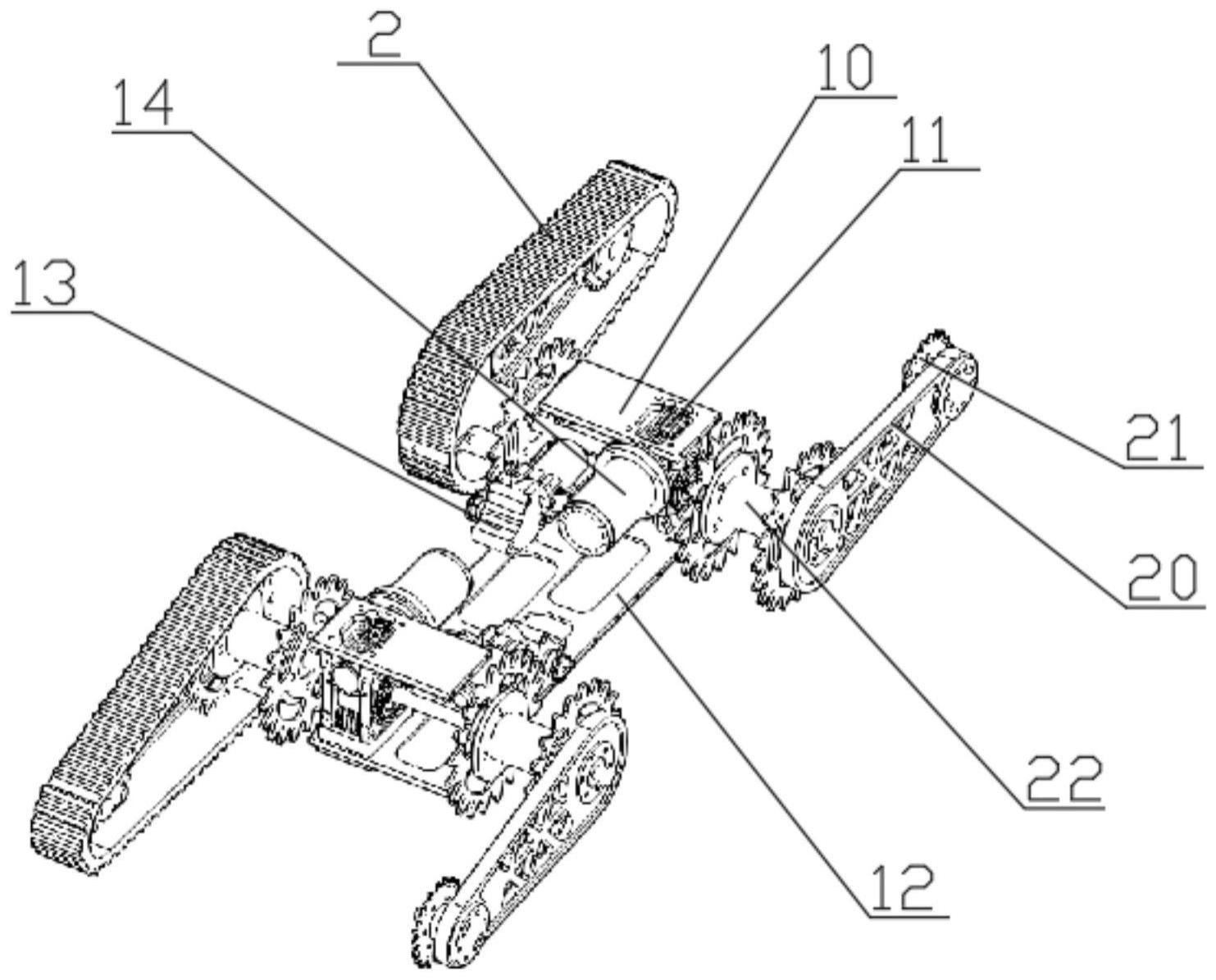
2、本发明一种基于目标定位智能巡检机器人是这样实现的,本发明一种基于目标定位智能巡检机器人:包括目标定位模块、行走组件、控制箱,目标定位模块置于行走组件上,控制箱置于行走组件内,目标定位模块包括目标识别器、微电脑、无线收发器、蓄电池,目标识别器为摄像头,且和微电脑电路交互,无线收发器嵌置于微电脑内,蓄电池和微电脑电联,微电脑内设置有用于对摄像头采集的图像分析、验证、判断的系统,行走组件包括车架组件、履带、传动组件,车架组件包括主体架、支撑架,主体架底部设置有底盘,多个支撑架对应置于主体架上,支撑架两个一组,且分别位于前后端,主体架内设置有传动组件,传动组件和支撑架对应连接形成传动,支撑架和主体架支架设置有翻转舵机,支撑架、主体架上对应设置有履带,分别为中部履带、第一端部履带、第二端部履带,支撑架端部设置有从动轮,驱动组件包括驱动电机、差速器、齿轮箱、传动轴,传动轴置于主体架上,且两端对应贯穿主体架,且和支撑架连接,传动轴之间设置有差速器,驱动电机和差速器连接形成驱动,底座上设置有控制器,驱动电机和差速器之间设置有齿轮箱,驱动组件设置两组,且对应两端的支撑架;
3、所述传动轴上设置有外传动轮链轮、内传动链轮,内传动链轮和中部履带对应形成传动,外传动连轮配合从动轮和端部履带进行传动,
4、所述齿轮箱为多级减速器,且对应置于底盘上,固定板盖合置于齿轮向上;
5、所述中部履带包括多个履带板,所述履带板本体的外侧面上设有橡胶层,所述履带板本体包括主板和底板,所述底板的相对两侧分别设有铰接槽和铰接端,所述铰接槽和所述铰接端均为梯形结构,所述铰接槽和所述铰接端一一对应,所述铰接端的长度大于所述铰接槽的深度;
6、所述内传动链轮、外传动链轮之间通过连接套对应连接,传动轴对应置于连接套内,且设置有行星轮减速器;
7、所述主体架两端的第一端部履带、第二端部履带独立翻转设置,从动轮直径小于外传动链轮;
8、所述主体架上下设置的中部履带支撑板,目标定位模块置于支撑板上;
9、所述摄像头采集图像通过采集移动轨迹上的内容,通过微电脑处理形成分析,传输至远端服务器上进行存储,对异常点进行反馈警报。
10、有益效果:
11、一、能够改变接近角、离去胶,提高通过性;
12、二、通过偏转支撑架进行主体架的支撑调节,进行通过地形的适应;
13、三、结构简单,使用方便。
技术特征:
1.一种基于目标定位智能巡检机器人,包括目标定位模块、行走组件、控制箱,目标定位模块置于行走组件上,控制箱置于行走组件内,目标定位模块包括目标识别器、微电脑、无线收发器、蓄电池,目标识别器为摄像头,且和微电脑电路交互,无线收发器嵌置于微电脑内,蓄电池和微电脑电联,微电脑内设置有用于对摄像头采集的图像分析、验证、判断的系统,其特征在于:行走组件包括车架组件、履带、传动组件,车架组件包括主体架(3)、支撑架(20),主体架(3)底部设置有底盘(12),多个支撑架(20)对应置于主体架(3)上,支撑架(20)两个一组,且分别位于前后端,主体架(3)内设置有传动组件,传动组件和支撑架(20)对应连接形成传动,支撑架(20)和主体架(3)支架设置有翻转舵机,支撑架(20)、主体架(3)上对应设置有履带,分别为中部履带(1)、第一端部履带(2)、第二端部履带(4),支撑架(20)端部设置有从动轮(21),驱动组件包括驱动电机(14)、差速器(140)、齿轮箱(11)、传动轴(141),传动轴(141)置于主体架(3)上,且两端对应贯穿主体架(3),且和支撑架(20)连接,传动轴(141)之间设置有差速器(140),驱动电机(14)和差速器(140)连接形成驱动,底座上设置有控制器(13),驱动电机(14)和差速器(140)之间设置有齿轮箱(11),驱动组件设置两组,且对应两端的支撑架(20)。
2.根据权利要求1所述的一种基于目标定位智能巡检机器人,其特征在于:所述传动轴(141)上设置有外传动轮链轮、内传动链轮(24),内传动链轮(24)和中部履带(1)对应形成传动,外传动连轮配合从动轮(21)和端部履带进行传动。
3.根据权利要求1所述的一种基于目标定位智能巡检机器人,其特征在于:所述齿轮箱(11)为多级减速器,且对应置于底盘(12)上,固定板(10)盖合置于齿轮向上。
4.根据权利要求1所述的一种基于目标定位智能巡检机器人,其特征在于:所述中部履带(1)包括多个履带板,所述履带板本体的外侧面上设有橡胶层,所述履带板本体包括主板和底板,所述底板的相对两侧分别设有铰接槽和铰接端,所述铰接槽和所述铰接端均为梯形结构,所述铰接槽和所述铰接端一一对应,所述铰接端的长度大于所述铰接槽的深度。
5.根据权利要求1所述的一种基于目标定位智能巡检机器人,其特征在于:所述内传动链轮(24)、外传动链轮(23)之间通过连接套对应连接,传动轴(141)对应置于连接套内,且设置有行星轮减速器。
6.根据权利要求1所述的一种基于目标定位智能巡检机器人,其特征在于:所述主体架(3)两端的第一端部履带(2)、第二端部履带(4)独立翻转设置,从动轮(21)直径小于外传动链轮(23)。
7.根据权利要求1所述的一种基于目标定位智能巡检机器人,其特征在于:所述主体架(3)上下设置的中部履带(1)支撑板,目标定位模块置于支撑板上。
8.根据权利要求1所述的一种基于目标定位智能巡检机器人,其特征在于:所述摄像头采集图像通过采集移动轨迹上的内容,通过微电脑处理形成分析,传输至远端服务器上进行存储,对异常点进行反馈警报。
技术总结
本发明提供一种基于目标定位智能巡检机器人,属于巡检机器人领域。特别涉及一种用于结合图像识别系统进行巡检的机器人移动部。包括目标定位模块、行走组件、控制箱,目标定位模块置于行走组件上,控制箱置于行走组件内,目标定位模块包括目标识别器、微电脑、无线收发器、蓄电池,目标识别器为摄像头,且和微电脑电路交互,无线收发器嵌置于微电脑内,蓄电池和微电脑电联,微电脑内设置有用于对摄像头采集的图像分析、验证、判断的系统,行走组件包括车架组件、履带、传动组件,车架组件包括主体架、支撑架,主体架底部设置有底盘,多个支撑架对应置于主体架上,支撑架两个一组,且分别位于前后端,主体架内设置有传动组件,通过偏转支撑架进行主体架的支撑调节,进行通过地形的适应。
技术研发人员:王晓雷,李高华,殷文才
受保护的技术使用者:扬州允能光电科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!