一种可调节机械手的关节以及机械手的制作方法
1.本技术涉及机械手的领域,尤其是涉及一种可调节机械手的关节以及机械手。
背景技术:
2.在汽车制造中有大量需要进行焊接的工作,过去多依赖人工进行焊接。人工焊接一方面焊接效率低,另一方面焊接的质量往往依赖工人的经验和工作状态。随着社会经济的高速发展,焊接机械手开始逐渐代替人工焊接,实现汽车焊接工作的机械化和自动化,提高了生产效率,降低了用人成本。
3.机械手是一种能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置,特点是可以通过编程来完成各种预期的作业,构造和性能上兼有人和机械手机器各自的优点。
4.现有技术中申请号为cn202122873299.x的实用新型专利公开了一种汽车焊接件可调节焊接机械手,其包括第一调节机构、移动机构、第二调节机构、拼接机构以及收集机构。第一调节机构包括固定座、第一支臂、第一电机、第二支臂以及第二电机。固定座上方一侧固定安装有第一电机,第一电机的输出端与第一支臂的一端连接,第一电机为伺服电机,可以带动第一支臂进行摆动,对焊接加工的水平位置和高度进行调节;第一支臂的另一端一侧固定安装有第二电机,第二电机的输出端与第二支臂的一端连接,通过第二电机可以带动第二支臂进行上下摆动。
5.针对上述中的相关技术,发明人认为第二电机设置于第一支臂单侧,第二支臂通过设置于第一支臂上的第二电机驱动进行上下摆动,此时第二电机的主轴单侧受力,支臂也是单侧受力,受力不均影响机械手的重心,并且当支臂频繁转动时,支臂的转轴靠近电机主轴的一端会容易出现因疲劳强度极限而损坏。
技术实现要素:
6.为了使机械手关节处均匀受力转动,本技术提供一种可调节机械手的关节。
7.一方面,本技术提供的一种可调节机械手的关节,采用如下的技术方案,该汽车焊接件可调节焊接机械手的关节包括:第一连接座、与第一连接座转动连接的第二连接座以及驱动第一连接座和第二连接座相对转动的驱动装置,所述驱动装置包括驱动电机和减速器,所述第二连接座的一端开设有用于容纳第一连接座一端的安装槽,所述第一连接座安装有驱动装置的一端置于安装槽内,所述第一连接座两侧均安装有所述减速器,所述驱动电机安装于第一连接座一端且位于两个减速器之间,所述驱动电机的主轴两端均与一减速器的输入轴连接,所述减速器的输出轴均穿过第二连接座的安装槽侧壁并且与第二连接座固定连接。
8.通过采用上述技术方案,驱动驱动电机转动,进而带动驱动电机主轴两端连接的减速器转动,此时驱动电机的主轴两端同时受力,分散了原来集中于电机主轴一端的力;驱动电机主轴两端设置的减速器转动带动第一连接座转动,使第一连接座两侧受力均匀,缓
解了因受力不均引发的疲劳损坏。
9.可选的,所述第二连接座包括支臂部和固定连接于支臂部的u型连接部,所述安装槽为u型连接部的u型槽,所述安装槽的侧壁开设有用于容纳减速器的容纳槽,所述减速器的输出端与容纳槽壁固定连接。
10.通过采用上述技术方案,驱动电机转动时,第二连接座的两侧会同时受力进行摆动,相比于单侧受力摆动更加稳定。
11.可选的,所述减速器包括壳体、第一行星齿轮组和第二行星齿轮组,所述第一行星齿轮组包括第一中心轮、与第一中心轮啮合的第一行星轮以及与第一中心轮呈同轴设置的第一内齿圈,所述第一行星轮与第一内齿圈啮合;所述第二行星齿轮组包括第二中心轮、与第二中心轮啮合的第二行星轮以及与第二中心轮呈同轴设置的第二内齿圈,所述第二行星轮与第二内齿圈啮合,所述第二行星轮与壳体转动连接;其中所述第一行星轮轴向转动连接于第二中心轮,驱动电机驱动第一中心轮转动,第二内齿圈与第一内齿圈固定连接。
12.通过采用上述技术方案,当第一中心轮在驱动电机的驱动下转动时,与第一行星轮的啮合作用促使第一行星轮产生自转;同时由于第一行星轮又与第一内齿圈啮合,在自转驱动力的作用下,第一行星轮将沿着与第一中心轮旋转相同的方向在第一内齿圈内滚动,形成围绕第一中心轮的公转运动。第一行星轮与第二中心轮转动连接,所以当第一行星轮围绕第一中心轮公转时带动第二中心轮转动,与第二中心轮啮合的第二行星轮产生自转,自转的第二行星轮带动与之啮合的第二内齿圈转动。驱动电机传递过来的转速经过第一行星齿轮组和第二行星齿轮组依次被降低。
13.可选的,所述第二中心轮的直径大于第一行星轮的公转直径。
14.通过采用上述技术方案,第一行星轮通过直轴直接转动连接于第二中心轮,结构更加紧凑,安装更加方便。
15.可选的,所述第一内齿圈和所述第二内齿圈均转动连接于壳体,并且两者同轴固定连接。
16.通过采用上述技术方案,第二内齿圈转动带动第一内齿圈同步同向转动,并且第一内齿圈的转动方向与第一行星齿轮的公转方向相反,导致进一步减慢第一行星齿轮的公转速度,进一步降低第二行星齿轮的转动速度,进一步提升传动比,提升关机运动的稳定性和运动的控制精度。
17.可选的,所述第二内齿圈的内径与所述第一内齿圈的内径相同,所述第二内齿圈的外径大于所述第一内齿圈的外径,所述第二内齿圈外壁开设有花键,所述容纳槽内壁设置有与所述花键适配的花键槽。
18.通过采用上述技术方案,第二行星轮通过啮合作用促使第二内齿圈转动,通过第二内齿圈上的花键输出动力使第二连接座摆动。
19.可选的,所述壳体包括第一壳体、第二壳体和连接轴,所述连接轴一端固定连接于第一壳体,另一端固定连接于第二壳体,所述第一壳体和所述第二壳体之间留有供第二内齿圈的花键伸出至壳体外的间隙,所述第一内齿圈和所述第二内齿圈均转动连接于第一壳体,所述第二行星轮转动连接于第二壳体,所述第一壳体转动连接有与驱动电机主轴固定连接的驱动轴,所述驱动轴另一端穿设至第一壳体内且固定连接有驱动轮,所述驱动轮与第一中心轮啮合,所述第一中心轮的厚度大于所述第一行星轮的厚度,所述第一中心轮和
所述第二中心轮均转动连接于连接轴。
20.通过采用上述技术方案,第一行星齿轮组和第二行星齿轮组均转动设置于壳体内。当驱动电机主轴转动时,带动与之固定连接的驱动轴及驱动轮转动,驱动轮通过啮合作用促使第一中心轮转动。
21.可选的,所述驱动轮的齿数小于所述第一中心轮的齿数。
22.通过采用上述技术方案,当驱动轮的转速传递给第一中心轮时,第一中心轮转速降低。
23.另一方面,本技术提供的一种可调节机械手,采用如下的技术方案,包括固定座和多个支臂,相邻支臂之间通过所述关节呈铰接设置,相互转动的支臂一个与所述关节的第一连接座固定连接,另一个与所述关节的第二连接座固定连接。
24.通过采用上述技术方案,多个支臂之间设置有上述关节,使得支臂在摆动时两侧受力更加均匀,摆动更加稳定。
25.可选的,所述第一连接座和/或第二连接座与支臂之间转动连接,且两者转动轴向与两支臂的转动轴向呈垂直。
26.通过采用上述技术方案,增大了支臂的转动角度。
27.综上所述,本技术包括以下至少一种有益技术效果:1.驱动驱动电机转动,进而带动驱动电机主轴两端连接的减速器转动,此时驱动电机的主轴两端同时受力,分散了原来集中于电机主轴一端的力;驱动电机主轴两端设置的减速器转动带动第一连接座转动,使第一连接座两侧受力均匀,缓解了因受力不均引发的疲劳损坏;2.减速器设置有第一行星齿轮组和第二行星齿轮组,使得驱动电机传递过来的转速经过第一行星齿轮组和第二行星齿轮组依次被降低;3.第一中心轮的厚度大于所述第一行星轮的厚度,可以使驱动轮与第一中心轮啮合,从而驱动第一中心轮转动。
附图说明
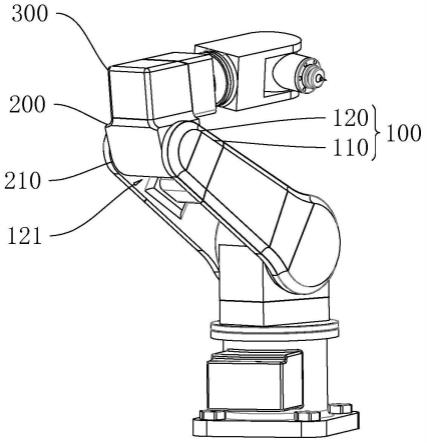
28.图1是实施例1一种可调节机械手的关节的结构示意图。
29.图2是实施例1一种可调节机械手的关节的驱动装置的剖视图。
30.图3是图2中a的放大图。
31.图4是实施例2一种可调节机械手的结构示意图。
32.附图标记说明:100、第二连接座;110、支臂部;120、u型连接部;121、安装槽;122、容纳槽;123、花键槽;200、驱动装置;210、驱动电机;211、驱动轴;212、驱动轮;220、减速器;231、第一壳体;232、第二壳体;233、连接轴;241、第一中心轮;242、第一行星轮;243、第一内齿圈;244、连接杆;251、第二中心轮;252、第二行星轮;253、第二内齿圈;254、花键;300、第一连接座;400、固定座;500、支臂;600、转盘。
具体实施方式
33.以下结合附图1-3对本技术作进一步详细说明。
34.实施例1,一种可调节机械手的关节,该可调节机械手的关节包括:
第一连接座300、与第一连接座300转动连接的第二连接座100以及驱动第一连接座300和第二连接座100相对转动的驱动装置200。
35.参照图1,第二连接座100包括支臂部110和固定连接于支臂部110的u型连接部120,u型连接部120的u型槽为安装槽121,第一连接座300转动连接于安装槽121内。
36.参照图2,第一连接座300位于安装槽121内的一端设置有驱动装置200,驱动装置200包括驱动电机210和减速器220。第一连接座300的两侧固定设置有减速器220,本实施例中的驱动电机210为双输出轴电机,固定嵌设于第一连接座300上且位于两个减速器220之间,驱动电机210的主轴的两端均与一个减速器220的输入轴连接。
37.参照图3,本实施例中的减速器220包括壳体、第一行星齿轮组和第二行星齿轮组。壳体包括第一壳体231、第二壳体232以及连接轴233,连接轴233一端与第一壳体231固定连接,另一端与第二壳体232固定连接,第一壳体231和第二壳体232之间留有间隙。第一行星齿轮组和第二行星齿轮组均转动设置于第一壳体231内且均转动连接于连接轴233上。
38.参照图3,第一行星齿轮组包括第一中心轮241、与第一中心轮241啮合的第一行星轮242以及与第一中心轮241呈同轴设置的第一内齿圈243。第一行星轮242还与第一内齿圈243啮合,第一中心轮241的厚度大于第一行星轮242的厚度。第一壳体231靠近驱动电机210的一侧转动连接有与驱动电机210主轴固定连接的驱动轴211,驱动轴211另一端穿设至第一壳体231内且固定设置有驱动轮212,驱动轮212与第一中心轮241啮合且驱动轮212齿数小于第一中心轮241齿数。
39.第二行星齿轮组包括第二中心轮251、与第二中心轮251啮合的第二行星轮252以及与第二中心轮251呈同轴设置的第二内齿圈253。第二行星轮252与第二内齿圈253啮合,第二中心轮251的直径大于第一行星轮242的公转直径。第一行星轮242上转动连接有连接杆244,连接杆244另一端与第二中心轮251固定连接,当第一行星轮242围绕第一中心轮241公转时,带动第二中心轮251转动。第一中心轮241和第二中心轮251均转动连接于连接轴233上。第一内齿圈243与第二内齿圈253之间固定连接,第二内齿圈253的内径与第一内齿圈243的内径相同,但第二内齿圈253的外径大于第一内内齿圈的外径且第二内齿圈253的外壁上开设有花键254,花键254从第一壳体231和第二壳体232之间的间隙中露出与容纳槽122内壁上开设的花键槽123适配。
40.实施例1,一种可调节机械手的关节的实施原理为:驱动电机210主轴转动带动与之固定连接的驱动轴211转动,驱动轴211一端固定设置的驱动轮212转动与第一中心轮241啮合促使第一中心轮241转动,第一中心轮241与第一行星轮242的啮合作用促使第一行星轮242产生自转;同时由于第一行星轮242又与第一内齿圈243啮合,在自转驱动力的作用下,第一行星轮242将沿着与第一中心轮241旋转相同的方向在第一内齿圈243内滚动,形成围绕第一中心轮241的公转运动。第一行星轮242与第二中心轮251转动连接,所以当第一行星轮242围绕第一中心轮241公转时带动第二中心轮251转动,使与第二中心轮251啮合的第二行星轮252产生自转,自转的第二行星轮252带动与之啮合的第二内齿圈253转动。第一内齿圈243和第二内齿圈253同轴转动,第二内齿圈253外壁设置的花键254随之转动,进而带动第一连接座300转动。
41.实施例2,一种可调节机械手,参照图4,该可调节机械手包括:固定座400和多个支臂500。相邻支臂500之间通过实施例1公开的可调节机械手的
关节连接。固定座400靠近支臂500的一端设置有可以转动的转盘600,转盘600上固定设置有一支臂500,该支臂500另一端与另一个支臂500的一端转动连接。上述另一支臂500的另一端与第二连接座100远离驱动装置200的一端固定连接,一端转动设置有焊接头的支臂500与第一连接座300远离驱动装置200的一端固定连接。在另一实施例中第一连接座300和/或第二连接座100与支臂500之间转动连接,且两者转动轴向与两支臂500的转动轴向呈垂直,从而可以使机械手更加灵活。
42.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1