双臂机器人控制系统及用于自动喷涂的双臂机器人的制作方法
1.本发明涉及自动化控制技术领域,特别是涉及一种双臂机器人控制系统及用于自动喷涂的双臂机器人。
背景技术:
2.机器人是近三十年来发展起来的一种高科技自动化生产设备。机械手是机器人的一个重要分支,它的特点是可通过编程完成各种预期的作业任务,在构造和性能上兼有人和机器各自的优点,尤其体现在人的智能和适应性,机器作业的准确性和在各种环境完成作业的能力。
3.双臂机器人作为工业机器人市场新亮点。双臂型机器人成为降低人力成本,提高生产效率与补足劳力缺口等的解决方案。多机器人的协同作业是制造业发展的必然要求,双臂机器人就是适应这一要求而被开发出的一种新型机器人。相对于单臂机器人它可以大大增强机器人对复杂装配任务的适应性,同时可以提高工作空间的利用效率。
4.当前大多数工业机器人是应用在单臂机器人独自工作的场合。这样的机器人只适应于特定的产品和工作环境,并且依赖于所提供的专用设备和工具。虽然双臂机器人比单臂机器人多出一个手臂,但这不仅仅是一加一等于二的问题。双臂机器人的冗余度和双臂协调操作大大提高了其操作性能,这就使一加一远远大于二,所以双臂机器人的发展将会解决许多生活、工业、国防领域的问题,给人们的生活带来更多便利。双臂机器人能完成对于人来说易于实现的功能,它比双手协调机器人更具有实用价值,其高自律性及学习性,能够适应许多复杂环境,使其在工业生产、危险处理、国防、航天航空等方面得到广泛应用。
5.具体来说,动车组多采用双层薄壁铝合金作为车体结构,在行驶过程中不断震动并产生大量噪声,这些振动与会直接影响乘客的舒性,为了改善铝型材的隔声性能,在车体内部会喷涂阻尼材料以增强其阻尼性能,抑制其振动,从而降低噪声的产生和传播。
6.目前国内外轨道交通行业动车组车内阻尼涂料喷涂均为人工喷涂的方式,自动化喷涂阻尼材料尚未有应用。国内外目前应用最多的均为针对车体外表面的自动化喷涂设备,但动车组车内环境复杂,结构繁多,地板凹凸不平,现有自动化设备无法直接应用于车内施工。因动车组车内结构复杂、且阻尼涂料喷涂厚度不一,均依靠人工进行,存在较高的职业健康风险。喷涂质量与工人技能有较大关系,常出现喷涂厚度不均匀,局部流坠堆积等问题,为保证厚度均一性,需多次测量、多次喷涂。根据阻尼降噪需要,车内不同区域喷涂厚度不同,每次喷涂前均需测量定位,员工工作量较大。
技术实现要素:
7.本发明提供了一种用于自动喷涂的双臂机器人,能将操作人员从恶劣的施工工作环境中解脱出来,减少喷涂过程中有害气体对施工人员的伤害,有效的降低用工成本,提高生产效率和技术参数的重现性,提高喷涂质量。同时,本发明还对应提供了一种双臂机器人的控制系统,用于实现双臂机器人的协同工作。
8.本发明提供的一个技术方案,一种双臂机器人控制系统,通过对双臂机器人两个机械臂的路径进行规划来实现对双臂机器人的控制,控制的方法包括以下步骤:s10,设定坐标系:设定双臂机器人的底座作为全局坐标系,记为;设定左臂本体坐标系和右臂基本坐标系,左右臂的本体基本坐标系分别定义了左臂坐标系和右臂坐标系在全局坐标系中的位置;设定机器人末端工件所在的左臂末端工件坐标系和右臂末端工件坐标系,两个末端工件坐标系分别定义了左臂末端坐标系和右臂末端坐标系相对于各自本体坐标系的位置;设定工件坐标系,工件坐标系定义了工件坐标系在全局坐标系中的位置,该坐标系独立于两个机械臂的坐标系,可以是固定的或者运动的;s20,路径规划:在独立工件坐标系中,机器人左臂和机器人右臂的协同运动路径分别定义为和,在路径规划的过程中,机器人左臂的路径和机器人右臂的路径的位置计算分别为:;。
9.本发明双臂机器人控制系统,其中当工件坐标系内的坐标是运动的坐标时,在机器人左臂和机器人右臂的路径规划的每一个细分均需要更新工件坐标系的值。
10.本发明双臂机器人控制系统,其中在步骤s20中,机器人左臂相对于左臂本体坐标系的运动路径为,机器人右臂相对于左臂末端工件坐标系的路径为,则机器人右臂的路径的位置计算为:。
11.本发明双臂机器人控制系统,其中对于同一协同路径段和,在步骤s20中,把两个机械臂的路径长度都按照规范化长度1来计算,当规划的步长,小于等于1时,两个手臂实际的路径长度为:
; 。
12.本发明提供的另一个技术方案,一种用于自动喷涂的双臂机器人,其中包括机器人左臂和机器人右臂,机器人左臂和机器人右臂活动安装在底座上,机器人左臂和机器人右臂的末端分别安装有喷涂系统,机器人左臂和机器人右臂通过双臂机器人控制系统进行控制。
13.本发明用于自动喷涂的双臂机器人,其中所述底座上设置有左臂移动轴和右臂移动轴,机器人左臂活动安装在左臂移动轴上,机器人右臂活动安装在右臂移动轴上。
14.本发明双臂机器人控制系统及用于自动喷涂的双臂机器人与现有技术不同之处在于,本发明双臂机器人控制系统及用于自动喷涂的双臂机器人将操作人员从恶劣的施工环境中解脱出来,减少喷涂过程中的有害气体对施工人员的伤害,有效降低了用工成本,提高了生产效率和技术参数的重现性。
15.本发明的双臂机器人共有14个自由度,由一个控制系统来实现协同控制,相比传统的机器人及自动化的控制方式,节省了一个控制系统的硬件成本。每条手臂的工作在同一个笛卡尔坐标系内,在整个运动学中,两条手臂可以实现协同控制,又可实现单独控制,每条手臂的在运动学上可以实现协同规划,来完成一些需要双臂协作的工作,方便实用。
16.本发明的双臂机器人区别于传统结构的双臂机器人,传统结构的双臂机器人由一个固定底座构成,该双臂机器人底座为移动轴的运动方式,增加了自由度,扩大了双臂机器人的运动范围。
17.下面结合附图对本发明的双臂机器人控制系统及用于自动喷涂的双臂机器人作进一步说明。
附图说明
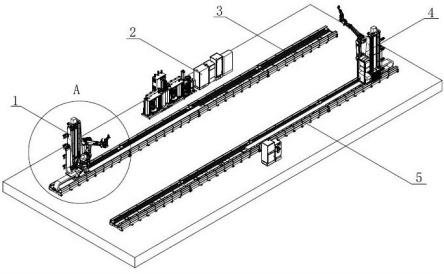
18.图1为本发明用于自动喷涂的双臂机器人的结构示意图;图2为图1中a处的局部放大图;图3为本发明用于自动喷涂的双臂机器人的主视图;图4为本发明用于自动喷涂的双臂机器人的使用状态图;图中标记示意为:1-机器人左臂;2-机器人控制系统;3-左臂移动轴;4-机器人右臂;5-右臂移动轴。
具体实施方式
19.以下实施例用于说明本发明,但不用来限制本发明的范围。
20.如图1-图4所示,本发明用于自动喷涂的双臂机器人,包括机器人左臂1、左臂移动轴3、机器人右臂4、右臂移动轴5、喷涂系统和机器人控制系统2。左臂移动轴3和右臂移动轴5作为机器人手臂的底座。
21.机器人左臂1活动安装在左臂移动轴3上,可以沿左臂移动轴3的长度方向,即车厢的长度方向运动;机器人右臂4活动安装在右臂移动轴5上,可以沿右臂移动轴5的长度方向,即车厢的长度方向移动。两侧的移动轴和机器人的机械臂共同构成两臂共14个自由度的双臂机器人。
22.机器人左臂1和机器人右臂4的末端分别安装有能够喷涂阻尼材料的喷涂系统,喷涂系统用于对车厢侧壁进行喷涂。
23.双臂机器人控制系统主要用于协同机器人的两个机械臂协同工作。双臂机器人的机械臂具有两种工作模式:一种是只有单一侧机械臂进行工作,每个机械臂独立工作,只要工作过程中没有碰撞和干涉,各个机械臂独立规划自己的运动和逻辑,既可实现单手臂在一侧的单独喷涂作业,这种工作状态采用普通的机器人控制系统即可进行控制;另一种是双臂协同工作,这种模式下两个机械臂在工作过程中要基于实时的严格位置同步要求,协同工作模式运用双臂统一工作空间轨迹规划和单臂独立关节空间运动规划相结合,实现双臂机器人在协同工作中的位置闭环。
24.本发明双臂机器人控制系统针对于协同工作模式下的双臂机器人,为了建立准确地双臂协同路径,先对全局、机器人本体、末端喷涂系统、工件所在的位置的坐标系进行设定。设定的坐标系具体包括:设定双臂机器人的底座作为全局坐标系,记为;设定左臂本体坐标系和右臂基本坐标系,根据左臂基座中心点及右臂基座中心点在以双臂机器人整机底座中心点为全局坐标系的位置,我们定义了左右臂的本体基本坐标系分别定义了左臂坐标系和右臂坐标系在全局坐标系中的位置;设定喷涂系统所在的左臂末端工件坐标系和右臂末端工件坐标系,两个末端工件坐标系分别定义了左臂末端坐标系和右臂末端坐标系相对于各自本体坐标系的位置;设定工件坐标系,工件坐标系定义了工件坐标系在全局坐标系中的位置,该坐标系独立于两个机械臂的坐标系,可以是固定的或者运动的。
25.经过上述坐标系的设定,便可以对双臂机器人的加工路径进行规划。在独立工件坐标系中,左臂和右臂的协同运动路径可以分别定义为和。在路径规划的过程中,根据左臂基坐标系跟右臂基坐标系在以双臂机器人底座为中心的全局坐标系下的相对位置关系,左臂的路径和右臂的路径的位置计算分别为:;。
26.如果工件坐标系是运动的坐标,在路径规划的每一个细分都需要更新该坐标系的值。
27.在其他实施例中,也可以把协同运动定义为左臂相对于自己手臂本体坐标系的运
动路径,右臂的运动定义为相对于左臂末端工件坐标系的路径。在路径规划中,根据左臂基坐标系跟右臂基坐标系在以双臂机器人底座为中心的全局坐标系下的相对位置关系,右臂的路径的位置计算为:。
28.为了实现双臂在协同路径中的准确同步运动规划,在路径规划过程中,把各个机械臂协同运动的路径段根据路径长度进行归一化处理。对于同一协同路径段和,分别计算各自的路径的长度和,在路径规划过程中把各机械臂的路径长度都按照规范化长度1来计算,假如在归一化空间中规划的步长为,则两个手臂实际的路径长度可以通过下列公式进行计算:; 。
29.通过以上方式,本发明双臂机器人控制系统实现了一个控制系统同时两个机器人手臂,来实现真正的双臂机器人,从而实现高效、节能的动车组内的阻尼材料的自动喷涂。
30.本发明用于自动喷涂的双臂机器人的主要设计目标为两个机械臂在同一个工作空间或者针对同一个工作对象上协同完成一些列工作任务,这样可以将操作人员从恶劣的施工环境中解脱出来,减少喷涂过程中的有害气体对施工人员的伤害,有效降低了用工成本,提高了生产效率和技术参数的重现性。
31.本发明的双臂机器人共有14个自由度,由一个控制系统来实现协同控制,相比传统的机器人及自动化的控制方式,节省了一个控制系统的硬件成本。每条手臂的工作在同一个笛卡尔坐标系内,在整个运动学中,两条手臂可以实现协同控制,又可实现单独控制,每条手臂的在运动学上可以实现协同规划,来完成一些需要双臂协作的工作。该双臂机器人含有两种工作模式:独立工作模式,即每个机械臂独立规划运动;协同工作模式,即两个手臂在工作时有严格的同步要求,可以同时协同运动。
32.双臂机器人的两条手臂在同一笛卡尔坐标系下可以进行协同运动,每条手臂直接在坐标系的位置及姿态进行统一配置,可实现两条手臂的协同的路径规划及运动规划,方便实用。
33.本发明的双臂机器人区别于传统结构的双臂机器人,传统结构的双臂机器人由一个固定底座构成,该双臂机器人底座为移动轴的运动方式,增加了自由度,扩大了双臂机器人的运动范围。
34.虽然,上文中已经用一般性说明及具体实施例对本发明作了详尽的描述,但在本发明基础上,可以对之作一些修改或改进,这对本领域技术人员而言是显而易见的。因此,在不偏离本发明精神的基础上所做的这些修改或改进,均属于本发明要求保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1