一种鲍登线和绑缚织物传动的控制方法
本发明属于服务机器人,具体涉及一种鲍登线和绑缚织物传动的控制方法。
背景技术:
1、近年来,柔性下肢助力外骨骼在医疗、搬运、军事方面的显著功能获得科研人员的广泛关注。电机驱动技术目前比较成熟,易控制,是柔性下肢助力外骨骼常用的驱动方式。从电机输出端驱动鲍登线到人体腿部绑缚织物的方式是柔性外骨骼最常见的柔性助力装置。
2、目前柔性下肢助力外骨骼的传力路径:鲍登线-绑缚织物在传动过程中存在着力的损耗、迟滞及控制精度差等问题。针对鲍登线传力系统,专利《一种基于套索传动的柔性膝关节助力康复装置》设计了一种从电机输出力通过套索传到末端尼龙绑缚织物的结构,实现了结构上的柔性以及传动的柔性。该专利装置简单轻巧,侧重于结构设计方面,但对该传动系统的控制涉及较少。文献《套索传动特性分析》通过搭建实验台分析了套索力和位移传动特性的静态模型和动态模型,得到套索力和位移输入输出关系中的死区、迟滞、方向依赖性等非线性特性与套索接触面积间摩擦因数、套索全曲率及绳索等效弹性系数有关。文献《双套索系统力矩传动特性与摩擦补偿分析》推导了任意负载在条件下的双套索力矩传动模型,并给予力矩传动模型设计一种无末端反馈的摩擦补偿控制器,使得系统的输出能跟随期望的力矩轨迹。以上文献研究了套索传动过程中的影响因素以及力矩传动特性,并作出摩擦补偿,但缺乏对末端绑缚织物的传力分析。
技术实现思路
1、针对现有技术存在的缺陷,本发明提供一种鲍登线和绑缚织物传动的控制方法,可有效解决上述问题。
2、本发明采用的技术方案如下:
3、本发明提供一种鲍登线和绑缚织物传动的控制方法,包括以下步骤:
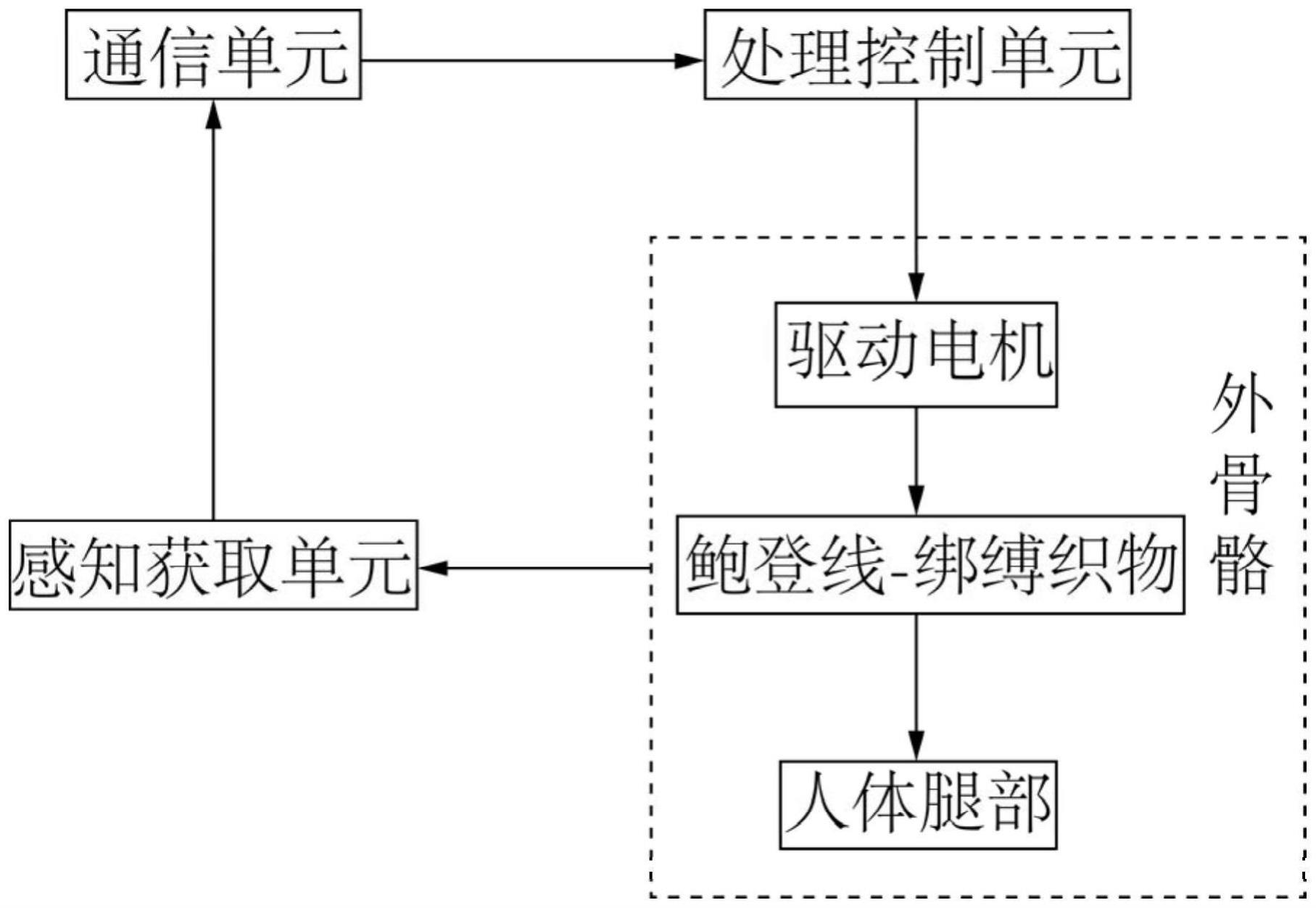
4、步骤1,构建柔性下肢助力外骨骼;所述柔性下肢助力外骨骼包括处理器、驱动电机、鲍登线、绑缚织物和感知获取单元;
5、所述鲍登线包括钢丝绳以及套于所述钢丝绳外面的套管;所述钢丝绳的一端与所述驱动电机的输出端连接;所述钢丝绳的另一端与所述绑缚织物相连;所述绑缚织物固定在人体腿部;
6、步骤2,在人穿戴所述柔性下肢助力外骨骼进行行走时,所述感知获取单元实时感知获得人体腿部动作信息,并将所述人体腿部动作信息发送给所述处理器;
7、步骤3,所述处理器分析所述人体腿部动作信息,获得当前所处的步态周期,从而生成预期拉力值f0;
8、步骤4,所述处理器采用混合拉力补偿模型,得到混合拉力补偿值f3;
9、步骤4.1,对鲍登线传动进行微元分析,建立鲍登线的静态摩擦模型,根据所述鲍登线的静态摩擦模型,得到当前时刻的鲍登线的摩擦补偿值f1;
10、步骤4.2,对绑缚织物采用有限元的方法进行拉伸力学性能数值模拟分析,建立绑缚织物的拉力补偿模型;根据所述绑缚织物的拉力补偿模型,得到当前时刻的绑缚织物的拉力补偿值f2;
11、步骤4.3,对鲍登线的摩擦补偿值f1和绑缚织物的拉力补偿值f2进行求和运算,得到混合拉力补偿值f3;
12、步骤5,对预期拉力值f0和混合拉力补偿值f3进行求和计算,得到最终的拉力输入值f4;
13、以最终的拉力输入值f4为系统实际输入,采用模糊自抗扰控制器,得到对驱动电机的输入拉力控制信号,从而对驱动电机进行控制,驱动电机通过钢丝绳作用于人体腿部,并使腿部受到的实际拉力等于预期拉力值f0。
14、优选的,步骤4.1具体为:
15、所述鲍登线的静态摩擦模型,描述鲍登线输入端与输出端的拉力传动关系,具体的,当鲍登线静止时,fout=fin(t-);其中,fout为当前时刻鲍登线输出端的拉力;fin(t-)为前一时刻的鲍登线输入端的拉力;
16、当鲍登线往复移动时,其中,为钢丝绳在套管内部的相对滑动速度,规定与输入拉力方向一致时为正方向,反之为负;μ是钢丝绳与套管之间的摩擦系数,κ(l,t)是该处的曲率,fout(t-)为前一时刻的输出拉力;fin为当前时刻鲍登线输入端的拉力;l是鲍登线微元段的长度;t是当前时间;l是鲍登线的总长度。
17、优选的,步骤4.2具体为:
18、建立下肢与绑缚织物模型;所述下肢与绑缚织物模型包括大腿、小腿、腿部绑缚织物和末端绑缚织物;所述大腿与小腿连接处设置铰连接;所述小腿的外部绑定所述腿部绑缚织物;所述腿部绑缚织物的上方为末端绑缚织物;
19、对下肢与绑缚织物模型中的各部件划分网格后,采用面到面绑定的方法,定义小腿与腿部绑缚织物之间的相互作用,腿部绑缚织物选用绑定的方式与末端绑缚织物连接到一起;
20、然后对大腿施加完全固定约束,对其余所有部件施加重力载荷模拟行走过程所受的重力;
21、然后在末端绑缚织物上方施加与y正向的压力载荷,载荷的大小与人在步态周期中所需要的关节力矩保持一致,因此,施加载荷大小为幅值均是正的正弦曲线,选用周期幅值加载,以保证小腿在周期内往复运动;
22、通过对腿部绑缚织物和末端绑缚织物上表面分别相隔1/4处进行历程变量输出,再对截面合力的历程变量输出结果后处理,在后处理的曲线中,展示各截面受到的输出力变化;
23、绘图绑缚织物从输入端输入的载荷大小与末端绑缚织物所受到的整体均值输出拉力之间的关系,得到绑缚织物输入力与输出力之间的关系,进而得到绑缚织物的力传递模型;
24、根据绑缚织物的力传递模型,得到当前时刻的绑缚织物的拉力补偿值f2。
25、本发明提供的一种鲍登线和绑缚织物传动的控制方法具有以下优点:
26、本发明提供的一种鲍登线和绑缚织物传动的控制方法,可有效提高鲍登线和绑缚织物在传动过程中的控制精度。
技术特征:
1.一种鲍登线和绑缚织物传动的控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的鲍登线和绑缚织物传动的控制方法,其特征在于,步骤4.1具体为:
3.根据权利要求1所述的鲍登线和绑缚织物传动的控制方法,其特征在于,步骤4.2具体为:
技术总结
本发明提供一种鲍登线和绑缚织物传动的控制方法,包括以下步骤:处理器采用混合拉力补偿模型,得到混合拉力补偿值;对预期拉力值和混合拉力补偿值进行求和计算,得到最终的拉力输入值;以最终的拉力输入值为系统实际输入,采用模糊自抗扰控制器,得到对驱动电机的输入拉力控制信号,从而对驱动电机进行控制,驱动电机通过钢丝绳作用于人体腿部,使得腿部受到的实际拉力为预期拉力值。本发明提供的一种鲍登线和绑缚织物传动的控制方法具有以下优点:本发明提供的一种鲍登线和绑缚织物传动的控制方法,可有效提高鲍登线和绑缚织物在传动过程中的控制精度。
技术研发人员:李鑫,王东豪,马冠军
受保护的技术使用者:北方工业大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!