试组装机器人的制作方法
本发明涉及电力铁塔组装,具体涉及试组装机器人。
背景技术:
1、输电线路铁塔是输电用的塔状建筑物。它们的结构特点是各种塔型均属空间桁架结构,杆件主要由单根等边角钢或组合角钢组成,杆件间连接采用粗制螺栓,靠螺栓受剪力连接,整个塔由角钢、连接钢板和螺栓组成,个别部件如塔脚等由几块钢板焊接成一个组合件,因此热镀锌防腐、运输和施工架设极为方便。
2、现有的输电线路试组装塔,在组装时通常是靠人工识别件号、由于试组装塔结构较大,所需的杆件较多,人工识别件号,效率低,容易出错,同时安装所需要人员多、安装效率低、安全性低。
技术实现思路
1、本发明的目的在于:为解决人工识别件号,效率低,容易出错,安装所需要人员多、安装效率低、安全性低的问题,本发明提供了试组装机器人。
2、本发明为了实现上述目的具体采用以下技术方案:
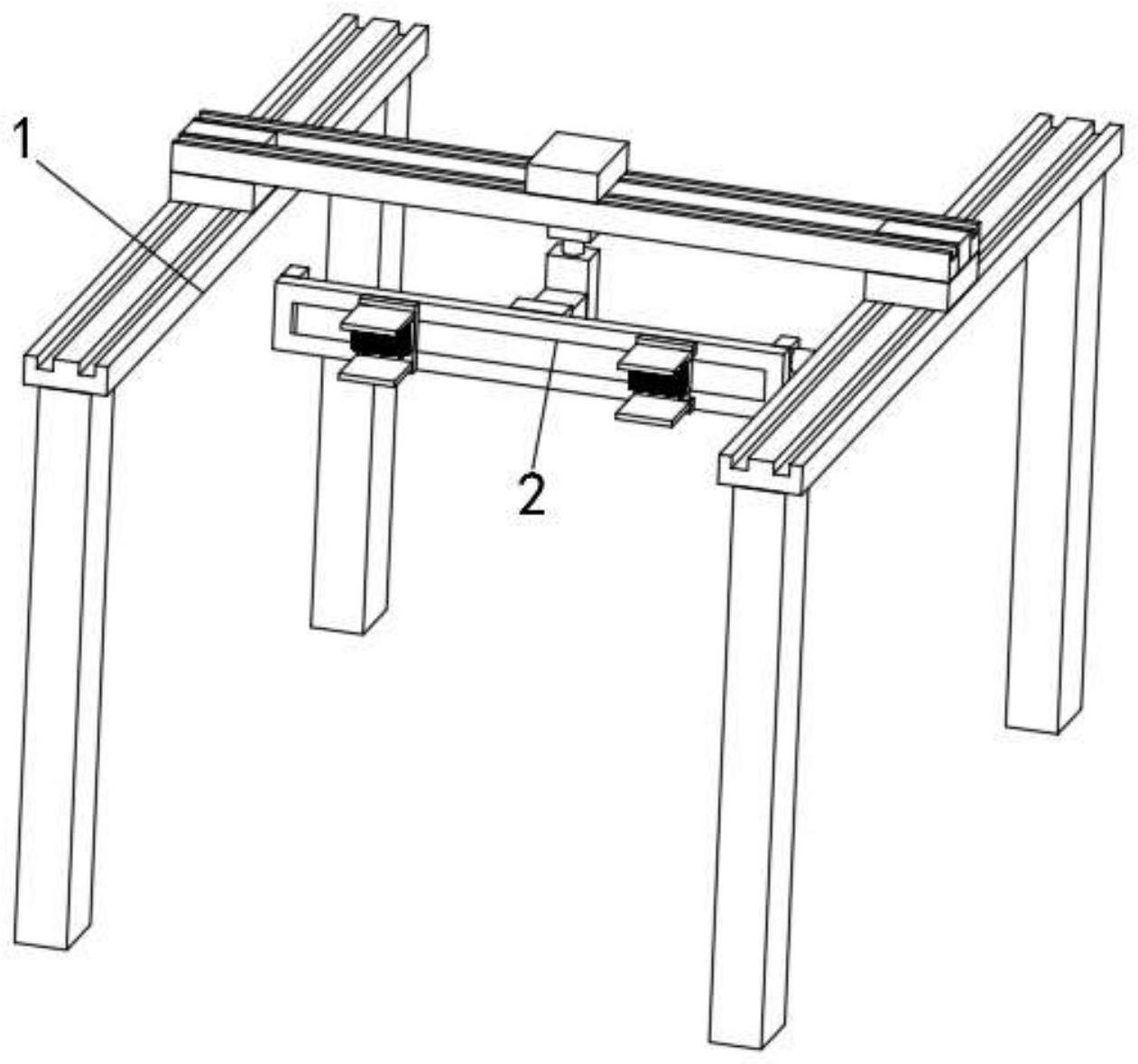
3、试组装机器人,包括龙门架组件与组装机构,所述组装机构安装在龙门架组件上,所述龙门架组件能带动组装机构横向与纵向移动,所述组装机构包括安装在龙门架组件上的安装架的底部设置有能滑动与翻转的组装板;
4、还包括开设在组装板正面的滑槽,所述滑槽的内部滑动连接有左滑块与右滑块,所述左滑块与右滑块的内部均设置有锁定机构,所述锁定机构能限制左滑块与右滑块滑动,所述左滑块与右滑块的正面均设置有能夹持试组装塔杆件的夹持机构,所述左滑块的外侧设置有扫描组件,所述扫描组件能捕获试组装塔杆件图像并将之转换成外连计算机可以显示、编辑、存储和输出的数据。
5、进一步地,所述安装架的底部安装有通过电机驱动的第一转轴,所述第一转轴的底部固定连接有转架,所述转架的正面安装有通过电机驱动的第二转轴,所述第二转轴的正面固定连接有导向架,所述组装板设置在导向架的正面。
6、进一步地,所述导向架的正面开设有导向槽,所述导向架的内部开设有螺纹孔,所述组装板的背面设置有滑动连接在导向槽中的导向块,所述组装板的背面转动安装有通过电机驱动的丝杠,所述丝杠的螺纹连接在螺纹孔中。
7、进一步地,所述锁定机构包括开设在左滑块与右滑块内部的传动槽,所述传动槽的内壁设置有锁定电磁铁,所述传动槽的内部滑动连接有锁定滑块,所述锁定滑块与传动槽内壁之间设置有拉簧,所述锁定滑块的外侧铰接有连杆,所述传动槽的内部滑动连接有与连杆相铰接的锁定块,还包括开设在滑槽内壁的卡槽,所述锁定块能卡接在卡槽中。
8、进一步地,所述夹持机构包括转动安装在左滑块与右滑块外侧的夹持螺杆,所述夹持螺杆通过电机驱动,所述夹持螺杆,所述夹持螺杆两端的螺旋方向相反,所述夹持螺杆的上端螺纹连接有上夹板,所述夹持螺杆的下端螺纹连接有下夹板。
9、进一步地,所述上夹板的底部固定连接有夹持盒,所述夹持盒的外侧插接有夹持滑柱,所述夹持滑柱整列分布。
10、进一步地,所述夹持滑柱位于夹持盒内部的一端设置有固定块,所述固定块与夹持盒之间设置有顶簧,所述夹持盒的内壁安装有第二电磁铁,所述夹持滑柱采用黄铜制成。
11、进一步地,所述夹持滑柱呈阶梯设置,相邻所述夹持滑柱的最大半径处相互接触。
12、进一步地,所述导向架与安装架之间的距离大于龙门架组件上横梁宽度的一半。
13、本发明的有益效果如下:
14、1、本发明,通过控制组装板翻转成竖直状态,然后解锁锁定机构,左滑块与右滑块在重力的作用下滑动至组装板底部,且左滑块位于右滑块的上方,此时方便将杆件夹持在右滑块上,且利用锁定机构将右滑块锁定,然后控制组装板翻转,左滑块在重力的作用下下降远离右滑块,左滑块带动扫描组件沿着杆件表面进行扫描拍摄,进而能对杆件长度、孔距等关键尺寸进行检测,同时能对杆件的识别号进行扫描拍摄,使用方便,识别效率高。
15、2、本发明,通过可横向与纵向运行的龙门架组件设计,能将杆件运输至任意位置,同时通过可翻转与可滑动的组装板的配合使用,使杆件能以任意位于与任意角度安装杆件,组装方便,组装效率高。
16、3、本发明,控制组装板翻转成竖直状态,然后解锁锁定机构,左滑块与右滑块在重力的作用下滑动至组装板底部,此时方便将杆件夹持在右滑块上,且利用锁定机构将右滑块锁定,组装时,以右滑块为组装基点,从而能保证自动对杆件进行对接,安装精度高。
技术特征:
1.试组装机器人,包括龙门架组件(1)与组装机构(2),其特征在于,所述组装机构(2)安装在龙门架组件(1)上,所述龙门架组件(1)能带动组装机构横向与纵向移动,所述组装机构包括安装在龙门架组件(1)上的安装架(21)的底部设置有能滑动与翻转的组装板(26);
2.根据权利要求1所述的试组装机器人,其特征在于,所述安装架(21)的底部安装有通过电机驱动的第一转轴(22),所述第一转轴(22)的底部固定连接有转架(23),所述转架(23)的正面安装有通过电机驱动的第二转轴(24),所述第二转轴(24)的正面固定连接有导向架(25),所述组装板(26)设置在导向架(25)的正面。
3.根据权利要求2所述的试组装机器人,其特征在于,所述导向架(25)的正面开设有导向槽,所述导向架(25)的内部开设有螺纹孔,所述组装板(26)的背面设置有滑动连接在导向槽中的导向块(27),所述组装板(26)的背面转动安装有通过电机驱动的丝杠(28),所述丝杠(28)的螺纹连接在螺纹孔中。
4.根据权利要求3所述的试组装机器人,其特征在于,所述锁定机构包括开设在左滑块(211)与右滑块(212)内部的传动槽,所述传动槽的内壁设置有锁定电磁铁(213),所述传动槽的内部滑动连接有锁定滑块(214),所述锁定滑块(214)与传动槽内壁之间设置有拉簧(215),所述锁定滑块(214)的外侧铰接有连杆(216),所述传动槽的内部滑动连接有与连杆(216)相铰接的锁定块(217),还包括开设在滑槽(29)内壁的卡槽(210),所述锁定块(217)能卡接在卡槽(210)中。
5.根据权利要求2所述的试组装机器人,其特征在于,所述夹持机构包括转动安装在左滑块(211)与右滑块(212)外侧的夹持螺杆(218),所述夹持螺杆(218)通过电机驱动,所述夹持螺杆(218),所述夹持螺杆(218)两端的螺旋方向相反,所述夹持螺杆(218)的上端螺纹连接有上夹板(219),所述夹持螺杆(218)的下端螺纹连接有下夹板(220)。
6.根据权利要求5所述的试组装机器人,其特征在于,所述上夹板(219)的底部固定连接有夹持盒(221),所述夹持盒(221)的外侧插接有夹持滑柱(222),所述夹持滑柱(222)整列分布。
7.根据权利要求6所述的试组装机器人,其特征在于,所述夹持滑柱(222)位于夹持盒(221)内部的一端设置有固定块,所述固定块与夹持盒(221)之间设置有顶簧(223),所述夹持盒(221)的内壁安装有第二电磁铁(224),所述夹持滑柱(222)采用黄铜制成。
8.根据权利要求7所述的试组装机器人,其特征在于,所述夹持滑柱(222)呈阶梯设置,相邻所述夹持滑柱(222)的最大半径处相互接触。
9.根据权利要求1-8任一项所述的试组装机器人,其特征在于,所述导向架(25)与安装架(21)之间的距离大于龙门架组件(1)上横梁宽度的一半。
技术总结
本发明公开了试组装机器人,涉及电力铁塔组装技术领域。本发明,包括龙门架组件与组装机构,所述组装机构包括安装在龙门架组件上的安装架的底部设置有能滑动与翻转的组装板;还包括开设在组装板正面的滑槽,所述滑槽的内部滑动连接有左滑块与右滑块,所述左滑块与右滑块的正面均设置有能夹持试组装塔杆件的夹持机构,所述左滑块的外侧设置有扫描组件,所述扫描组件能捕获试组装塔杆件图像并将之转换成外连计算机可以显示、编辑、存储和输出的数据。本发明,通过可横向与纵向运行的龙门架组件设计,能将杆件运输至任意位置,同时通过可翻转与可滑动的组装板的配合使用,使杆件能以任意位于与任意角度安装杆件,组装效率高。
技术研发人员:周新,郭瑞,马大鹏,武宜彬,陈碧辉
受保护的技术使用者:江苏齐天铁塔制造有限公司
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!