巡检机器人的清灰装置及具有清灰装置的巡检机器人总成的制作方法
1.本技术涉及巡检机器人清灰技术领域,具体涉及一种巡检机器人的清灰装置及具有清灰装置的巡检机器人总成。
背景技术:
2.皮带机巡检机器人在轨道行走过程中,因轨道表面堆积粉尘,雨雪天气会有雨水和冰雪,巡检机器人行走受到严重影响,会出现卡阻及打滑现象,导致巡检机器人无法正常工作。
技术实现要素:
3.有鉴于此,本技术提出一种巡检机器人的清灰装置及具有清灰装置的巡检机器人总成。
4.本技术提供一种具有清灰装置的巡检机器人总成,包括:
5.机器人本体,所述机器人本体沿移动轨道移动;
6.清灰装置,连接于机器人本体上并用于清扫所述移动轨道,其包括:
7.安装座,与所述机器人本体固定连接;
8.支撑杆组件,所述支撑杆组件包括至少一个支撑杆,所述支撑杆固定连接于所述安装座上;
9.清洁刷,所述清洁刷一端固定于所述支撑杆上,另一端抵接于所述移动轨道上。
10.可选的,所述支撑杆组件包括第一支撑杆、第二支撑杆以及连接于两者之间的弹性件;
11.所述第一支撑杆的第一端固定于所述安装座上,所述第二支撑杆转动连接于所述第一支撑杆的第二端,所述清洁刷固定于所述第二支撑杆上,所述弹性件向所述第二支撑杆施加接近所述移动轨道侧的作用力。
12.可选的,所述第二支撑杆通过转轴转动连接于所述第一支撑杆上,所述弹性件为套设于所述转轴上的扭簧,所述扭簧的扭力作用于所述第二支撑杆上。
13.可选的,所述第二支撑杆通过转轴转动连接于所述第一支撑杆上,所述弹性件为拉伸弹簧,所述拉伸弹簧一端连接于所述第一支撑杆的中部,另一端连接于所述第二支撑杆的中部。
14.可选的,所述移动轨道包括沿水平方向延伸的第一板体以及沿竖直方向延伸的第二板体;
15.所述机器人本体沿所述第一板体滑动,所述清洁刷清扫所述第一板体表面,所述第二支撑杆远离所述第一支撑杆的一侧抵接于所述第二板体上。
16.可选的,所述第二支撑杆的远离所述第一支撑杆的一端安装有滚轮,所述滚轮沿所述第二板体移动。
17.可选的,所述清洁刷包括固定连接的刷把和刷头,所述刷把固定安装在所述第二
支撑杆上,所述刷头用于清理所述移动轨道的第一板体。
18.可选的,所述刷头为可弯折的钢丝滚刷,所述刷头的长度大于所述刷把与所述第一板体之间的间隙,以使刷头与所述第一板体的抵接端部弯折设置。
19.可选的,所述安装座为法兰盘,所述法兰盘通过紧固件与所述机器人本体固定连接。
20.本技术还提供一种巡检机器人的清灰装置,连接于机器人本体上并用于清扫移动轨道,包括:
21.安装座,与所述机器人本体固定连接;
22.支撑杆组件,所述支撑杆组件包括至少一个支撑杆,所述支撑杆固定连接于所述安装座上;
23.清洁刷,所述清洁刷一端固定于所述支撑杆上,另一端抵接于所述移动轨道上。
24.本技术的有益效果:
25.本技术提供一种具有清灰装置的巡检机器人总成及巡检机器人的清灰装置,巡检机器人总成包括机器人本体和清灰装置,清灰装置连接于机器人本体上并用于清扫机器人本体的移动轨道,清灰装置的安装座,与机器人本体固定连接,支撑杆组件,包括至少一个支撑杆,支撑杆固定连接于安装座上,清洁刷的一端固定于支撑杆上,另一端抵接于移动轨道上。采用本技术的巡检机器人总成及清灰装置,可有效清理移动轨道上的积雪和粉尘,减少机器人在移动轨道上卡阻或打滑,保证巡检机器人正常工作。
附图说明
26.图1是本技术实施例的清灰装置的结构俯视示意图;
27.图2是本技术实施例的清灰装置的结构主视示意图;
28.图3是本技术实施例的清灰装置的结构侧视示意图。
具体实施方式
29.以下结合附图以及具体实施例,对本技术的技术方案进行详细描述。其中相同的零部件用相同的附图标记表示。需要说明的是,下面描述中使用的词语“前”、“后”、“左”、“右”、“上”和“下”指的是附图中的方向,词语“内”和“外”分别指的是朝向或远离特定部件几何中心的方向。
30.图1是本技术实施例的清灰装置的结构俯视示意图,图2是本技术实施例的清灰装置的结构主视示意图。本技术提供一种具有清灰装置的巡检机器人总成,包括:机器人本体,所述机器人本体沿移动轨道10移动。
31.清灰装置20,连接于机器人本体上并用于清扫所述移动轨道10,其包括:
32.安装座21,与所述机器人本体固定连接,实现清灰装置20与机器人本体的连接。
33.支撑杆组件22,所述支撑杆组件22包括至少一个支撑杆,所述支撑杆固定连接于所述安装座21上。
34.清洁刷23,所述清洁刷23一端固定于所述支撑杆上,另一端抵接于所述移动轨道10上,用于清扫移动轨道10。
35.在本技术上述实施例中,通过在与所述机器人本体固定连接的安装座21上设置至
少一个支撑杆以连接清洁刷23,使清洁刷23与移动轨道10保持接触。清灰装置20位于机器人本体移动方向的前面,清洁刷23提前将巡检机器人的移动轨道进行刷扫。
36.当巡检机器人巡检时,机器人本体带动清灰装置20一起移动,清灰装置20的清洁刷23与移动轨道10接触,清扫移动轨道10上的灰尘或积雪,保证巡检机器人正常移动,正常工作。
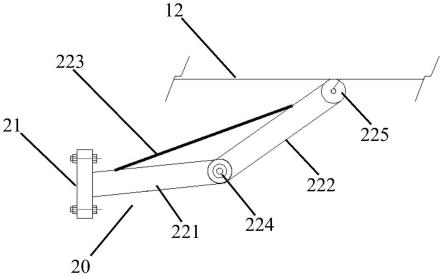
37.可选的,所述支撑杆组件22包括第一支撑杆221、第二支撑杆222以及连接于两者之间的弹性件223。
38.其中,所述第一支撑杆221的第一端固定于所述安装座21上,所述第二支撑杆222转动连接于所述第一支撑杆221的第二端,所述清洁刷23固定于所述第二支撑杆222上,所述弹性件223向所述第二支撑杆222施加接近所述移动轨道10侧的作用力,即弹性件223的弹性力使第二支撑杆222朝向接近所述移动轨道10移动,使位于第二支撑杆222上的清洁刷23始终能够抵接到移动轨道上,使其清洁刷23随移动轨道10的延伸方向转动,增加清洁刷23清洁的有效性。
39.如图1所示,在本技术一可选的实施例中,第一支撑杆221和第二支撑杆222通过销轴转动连接,第二支撑杆222远离第一支撑杆221的一端抵接在移动轨道10上,保证清洁刷23与移动轨道10的距离。
40.在机器人本体移动过程中,机器人本体带动第一支撑杆221和第二支撑杆222向前移动,第一支撑杆221对第二支撑杆222向前的推力与弹性件223施加在第二支撑杆222上接近所述移动轨道10侧的作用力达到平衡,使第二支撑杆222始终与移动轨道10抵接。
41.可选的,所述第二支撑杆222通过转轴224转动连接于所述第一支撑杆221上,所述弹性件223为套设于所述转轴224上的扭簧,所述扭簧的扭力作用于所述第二支撑杆222上,方便控制清洁刷23与移动轨道10的距离。
42.在本技术一可选的实施例中,当清灰装置20工作时,第二支撑杆222远离第一支撑杆221的一端与移动轨道10抵接,扭簧施加使第二支撑杆222向第一支撑杆221转动的力。
43.可选的,所述第二支撑杆222通过转轴224转动连接于所述第一支撑杆221上,所述弹性件223为拉伸弹簧,所述拉伸弹簧一端连接于所述第一支撑杆221的中部,另一端连接于所述第二支撑杆222的中部,方便控制清洁刷23与移动轨道10的距离。
44.在本技术一可选的实施例中,第一支撑杆221的中部和第二支撑杆222的中间均连接有卡环,拉伸弹簧的两端均通过挂钩与卡环卡接,方便装卸调整不同拉伸力度的拉伸弹簧。
45.可选的,所述移动轨道10包括沿水平方向延伸的第一板体11以及沿竖直方向延伸的第二板体12。
46.如图3所述,在本技术一可选的实施例中,移动轨道10可由工字钢形成,第一板体11和第二板体12垂直设置。
47.所述机器人本体沿所述第一板体11滑动,所述清洁刷23清扫所述第一板体11表面,所述第二支撑杆222远离所述第一支撑杆221的一侧抵接于所述第二板体12上,保证清洁刷23始终与第一板体11表面接触,有效清理第一板体11。
48.在本技术一可选的实施例中,第二支撑杆222与第二板体12抵接,可保证清洁刷23与第一板体11之间的距离,利用弹性件223的拉伸力,使第二支撑杆222对第二板体12具有
夹紧力,使机器人无论在直线轨道行走还是转弯时都可以对移动轨道10清扫,而且清扫力足够大。
49.清洁刷23可大体呈长方体,清洁刷23与第一板体11垂直设置,清洁刷23与第二板体12呈锐角设置,清洁刷23到第二板体12的距离沿机器人本体的移动方向逐渐减小,可将第一板体11表面的灰尘和积雪清扫到第一板体11外侧,有效清理移动轨道10。
50.可选的,所述第二支撑杆222的远离所述第一支撑杆221的一端安装有滚轮225,所述滚轮225沿所述第二板体12移动,减小摩擦力,方便清灰装置20的移动。
51.在本技术一可选的实施例中,滚轮225与第二支撑杆222转动连接,滚轮225与第二板体12抵接,第二支撑杆222施加滚轮225向前移动的力,防止第二支撑杆222带动滚轮225绕转轴224随意转动,弹性件223施加第二支撑杆222作用力,使滚轮225受力平稳,始终与第二板体12抵接,保证清灰装置20平稳地滑动。
52.可选的,所述清洁刷23包括固定连接的刷把231和刷头232,所述刷把231固定安装在所述第二支撑杆222上,所述刷头232用于清理所述移动轨道10的第一板体11,方便清扫第一板体11。
53.在本技术一可选的实施例中,第二支撑杆222上连接有相对设置的第一安装板和第二安装板,第一安装板和第二安装板上分别开有对应设置的第一安装孔和第二安装孔,刷把231设置在第一安装板和第二安装板之间,刷把231上开有通孔,通过螺栓依次穿过第一安装孔,通孔和第二安装孔,完成清洁刷23的安装固定,方便清洁刷23的更换安装。
54.可选的,所述刷头232为可弯折的钢丝滚刷,所述刷头232的长度大于所述刷把231与所述第一板体11之间的间隙,以使刷头232与所述第一板体11的抵接端部弯折设置,使刷头232始终与第一板体11接触,增加清洁刷23的清扫效果。
55.如图2所示,在本技术一可选的实施例中,钢丝滚刷具有弹性且清扫力度较大,当机器人本体在移动轨道10上下晃动时,刷头232仍与第一板体11抵接,进行清扫工作。
56.可选的,所述安装座21为法兰盘,所述法兰盘通过紧固件211与所述机器人本体固定连接,方便安装和拆卸清灰装置20。
57.在本技术一可选的实施例中,紧固件211可为螺栓,方便拆卸清灰装置,进行维护工作。
58.本技术还提供一种巡检机器人的清灰装置,连接于机器人本体上并用于清扫移动轨道10,包括:
59.安装座21,与所述机器人本体固定连接;
60.支撑杆组件22,所述支撑杆组件22包括至少一个支撑杆,所述支撑杆固定连接于所述安装座21上;
61.清洁刷23,所述清洁刷23一端固定于所述支撑杆上,另一端抵接于所述移动轨道10上。
62.本技术提供一种巡检机器人的清灰装置,连接于机器人本体上并用于清扫移动轨道10,通过设置安装座21,与机器人本体固定连接,支撑杆组件22,包括至少一个支撑杆,支撑杆固定连接于安装座21上,清洁刷23的一端固定于支撑杆上,另一端抵接于移动轨道10上。清灰装置20有效清理移动轨道10上的积雪和粉尘,减少机器人在移动轨道10上卡阻或打滑,保证巡检机器人正常工作。
63.以上,结合具体实施例对本技术的技术方案进行了详细介绍,所描述的具体实施例用于帮助理解本技术的思想。本领域技术人员在本技术具体实施例的基础上做出的推导和变型也属于本技术保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1