一种智能锁及其传动机构的制作方法
1.本实用新型涉及门锁安全控制技术领域,特别涉及一种智能门锁及其传动机构。
背景技术:
2.在智能锁的应用场景中,为降低传统钥匙锁更换智能锁的成本、提高安装时操作便捷性,保留原机械钥匙锁的锁体和锁芯,只需拆除门内面板部份,装上自动开关锁的产品,即可将家里的传统钥匙锁升级为智能门锁,可以通过app、密码、蓝牙等实现开关锁,适应用户自己安装的diy需求,简单方便。
技术实现要素:
3.本实用新型的目的为提供一种结构优化的智能锁及其传动机构,以提高智能锁的使用灵活性。
4.本实用新型提供一种一种智能锁的传动机构,其特征在于,包括安装有传动轴的输出齿轮,所述智能锁中的驱动部件和手动旋钮分别能带动所述输出齿轮转动,所述传动机构还包括传动齿轮减速组件和检测齿轮组件,所述传动齿轮减速组件设置于所述驱动部件的输出轴和所述输出齿轮之间,所述传动齿轮减速组件具有行星离合机构,用于接合或分离所述输出轴和所述输出齿轮之间的传动链;
5.所述检测齿轮组件与所述输出齿轮联动,用于将所述输出齿轮的转动按第一预定比例传递至其末级检测齿轮,所述第一预定比例小于1。
6.从以上描述可知,检测齿轮组件也是减速齿轮组,其主要作用是将输出齿轮的转速按第一预定比例减速传出,这样检测齿轮组件的末级检测齿轮的转速低于输出齿轮,可以通过适当配置第一预定比例的数值,实现输出齿轮转动n圈,末级检测齿轮所处齿轮轴的转动圈数小于一圈的技术效果。这样通过检测末级检测齿轮的转动角度就可以知晓输出齿轮的转动角度,有利于准确判断锁舌处于何种工作状态。
7.另外,本实用新型中驱动部件的输出轴与输出齿轮之间的传动齿轮减速组件可以通过行星离合机构接合或者断开,当使用手动旋钮开启时,行星离合机构处于断开传动齿轮减速组件的位置,这样这样当手动旋钮开门时,输出齿轮的转动不会反向传递至驱动部件,不会带动驱动部件反驱,减少手动开关锁的力,保护电路。
8.可选的,所述传动齿轮减速组件的第n级齿轮的齿轮轴为所述检测齿轮组件的输入轴,所述行星离合机构位于所述驱动部件的输出轴和所述传动齿轮减速组件的第n级齿轮之间。
9.可选的,所述传动齿轮减速组件的最后一级齿轮与所述输出齿轮啮合,所述传动齿轮减速组件的最后一级齿轮的齿轮轴为所述检测齿轮组件的输入轴。
10.可选的,所述传动齿轮减速组件的最后一级齿轮轴固定有并排的第一齿轮部和第二齿轮部,所述第一齿轮部与所述输出齿轮啮合,所述第二齿轮部为所述检测齿轮组件的输入齿轮。
11.可选的,与所述检测齿轮组件的末级检测齿轮固定连接的末级齿轮轴其中一端部与所述智能锁的角度传感器配合检测,以获取所述输出齿轮的转动角度。
12.可选的,所述末级齿轮轴其中一端部的周壁具有平行于轴向的扁平部,所述扁平部至少部分位于所述智能锁的控制板的电位器孔内部,以获取所述输出齿轮的转动角度。
13.可选的,所述行星离合机构包括太阳轮、行星架以转动安装于所述行星架的第一行星轮和第二行星轮,所述太阳轮与所述传动齿轮减速组件的第m级齿轮的齿轮轴同轴转动,所述行星架摆动安装于所述智能锁的中框,当所述行星架位于第一位置,所述第一行星轮与第m+1级齿轮啮合,以驱动所述第m+1级齿轮正向转动,当行星架位于第二位置,所述第二行星轮与第m+1级齿轮啮合,以驱动所述第m+1级齿轮反向转动,当行星架还具有位于所述第一位置和所述第二位置之间过渡行程区域。
14.可选的,所述行星架上固定有两个齿轮轴,所述第一行星轮和所述第二行星轮分别通过两个阻尼压簧转动安装于所述两个齿轮轴。
15.可选的,所述行星架背离行星轮的一侧还固定有离合拨片,与所述智能锁的控制板上的微动开关配合确定所述行星离合机构的工作位置。
16.此外,本实用新型还提供了一种智能锁,包括具有内腔的壳体组件以及位于所述壳体组件外部的手动旋钮,所述内腔中置有控制板以及上述任一项所述的传动机构,所述手动旋钮和所述驱动部件均能通过所述输出齿轮带动传动轴动作,以驱动锁舌伸缩。
17.本实用新型中的智能锁具有上述传动机构,故智能锁也具有传动机构的上述技术效果。
附图说明
18.图1为本实用新型一种实施例中智能锁局部结构示意图;
19.图2为图1所示结构的初步分解示意图;
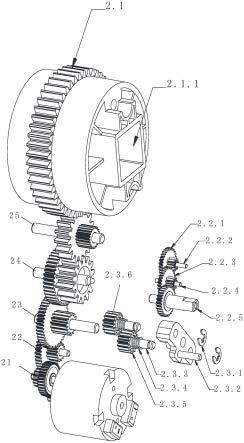
20.图3为图1所示结构的进一步分解示意图;
21.图4为图3中传动机构的分解示意图;
22.图5为图1中传动机构的侧视图;
23.图6为图5所示传动机构的左视图;
24.图7为图5所示传动机构的右视图。
25.其中,图1至图7附图标记与部件名称之间一一对应关系如下:
26.1壳体组件;1.1壳主体;1.2电机弹簧;1.3长电极弹簧;1.4绝
27.缘隔板;1.5螺钉;
28.2传动机构;2.1输出齿轮;2.1.1方孔;2.2检测齿轮组件;2.2.1齿轮一;2.2.2齿轮轴一;2.2.3齿轮二;2.2.4齿轮轴二;2.2.5检测齿轮轴;2.3行星离合机构;2.3.1卡簧;2.3.2行星架;2.3.3齿轮轴;2.3.4阻尼压簧;2.3.5第一行星轮;2.3.6第二行星轮;
29.2.4中框;2.5上盖;2.6离合拨片;2.7固定螺钉;20驱动部件;
30.21第一级齿轮传动;22第二级齿轮传动、23第三级齿轮传动、24第四级齿轮传动、25第五级齿轮传动。
具体实施方式
31.为了使本领域的技术人员更好地理解本实用新型的技术方案,下面结合附图和具体实施例对本实用新型作进一步的详细说明。
32.不失一般性,本实用新型以智能锁作为门锁使用为例,继续介绍技术方案和技术效果,当然,本领域内技术人员应当理解,本文所示的智能锁还可以应用于其他环境。
33.请参考图1至图7,本实用新型提供了一种智能锁,其包括具有内腔的壳体组件1以及位于壳体组件1外部的手动旋钮(图中未示出),壳体组件1可以包括壳主体1.1、中框2.4、上盖2.5等部件,壳体组件1的各部件用于提供其他零部件的安装基础及形成零部件的安装空间,各部件可以通过粘接或者螺钉连接等方式固定。图2中示出了壳主体1.1与中框2.4通过螺钉1.5固定,图3中示出了上盖2.5通过固定螺钉2.7固定于中框2.4。其中内腔中置有控制板(图中未示出)以及传动机构。手动旋钮位于壳体组件1的外部,以便于操作者从外部操作。
34.壳体组件1的结构不限于本文描述,可以根据具体产品而定。
35.本实用新型所提供的传动机构2包括输出齿轮2.1,输出齿轮2.1连接有同轴转动的传动轴,通常输出齿轮2.1的中部可以开设有方孔2.1.1,传动轴为方轴,安装于方孔2.1.1内部,当然传动轴的结构与输出齿轮2.1的安装结构不局限于上文描述。传动轴通过传动部件与锁舌相连,以驱动锁舌伸缩动作,从而实现关锁和开锁。
36.输出齿轮2.1的转动可以通过两条独立的机构操作,其一,操作者通过手动旋钮可以直接控制输出齿轮2.1转动,其二,驱动部件20通过传动齿轮减速组件也可以驱动输出齿轮2.1转动。本文以下主要介绍了驱动部件的输出轴与输出齿轮2.1之间的传动机构。
37.本实用新型提供的传动机构还包括传动齿轮减速组件和检测齿轮组件2.2,传动齿轮减速组件设置于驱动部件20的输出轴和输出齿轮2.1之间,传动齿轮减速组件具有行星离合机构2.3,用于接合或分离输出轴201和输出齿轮2.1之间的传动链。
38.检测齿轮组件2.2与输出齿轮2.1联动,用于将输出齿轮2.1的转动按第一预定比例传递至其末级检测齿轮,第一预定比例小于1。
39.从以上描述可知,检测齿轮组件2.2也是减速齿轮组,其主要作用是将输出齿轮2.1的转速按第一预定比例减速传出,这样检测齿轮组件2.2的末级检测齿轮的转速低于输出齿轮2.1,可以通过适当配置第一预定比例的数值,实现输出齿轮2.1转动n圈,末级检测齿轮所处齿轮轴的转动圈数小于一圈的技术效果。这样通过检测末级检测齿轮的转动角度就可以知晓输出齿轮2.1的转动角度,有利于准确判断锁舌处于何种工作状态。末级检测齿轮的转动角度可以通过轴电位器获取,即即使旋钮转动多圈,记录角度位置的轴电位器不会超过1圈。
40.另外,本实用新型中驱动部件20的输出轴与输出齿轮2.1之间的传动齿轮减速组件可以通过行星离合机构2.3接合或者断开,当使用手动旋钮开启时,行星离合机构2.3处于断开传动齿轮减速组件的位置,这样输出齿轮2.1的转动不会反向传递至驱动部件20,不会带动驱动部件20反驱,减少手动开关锁的力,保护电路。
41.在一种具体实施方式中,智能锁的传动机构的传动齿轮减速组件的第n级齿轮的齿轮轴为检测齿轮组件的输入轴,行星离合机构位于驱动部件的输出轴和传动齿轮减速组件的第n级齿轮之间。也就是说,沿驱动部件至输出齿轮动力传递方向,行星离合机构位于
检测齿轮组件的上游,这样行星离合机构断开传动齿轮减速组件后,检测齿轮组件依旧与输出齿轮能够联动,即检测齿轮组件与输出齿轮2.1在离合机构断开连接后依旧保持传动关系,传感器等检测部件依旧可以通过检测齿轮组件的末级检测齿轮实现输出齿轮2.1转动角度的检测。
42.在一种具体实施方式中,传动齿轮减速组件的最后一级齿轮与输出齿轮啮合,传动齿轮减速组件的最后一级齿轮的齿轮轴为检测齿轮组件的输入轴。即检测齿轮组件的输入轴可以直接固定安装于传动齿轮减速组件的最后一级齿轮的齿轮轴,结合图4至图7,图中示出了传动齿轮减速组件包括五级齿轮传动的具体结构,分别为:第一级齿轮传动21、第二级齿轮传动22、第三级齿轮传动23、第四级齿轮传动24、第五级齿轮传动25,其中每一级齿轮传动包括齿轮轴和设置于齿轮轴上的两个同步转动且直径不同的齿轮部,不同径的两齿轮部可以为一体结构,当然也可以为分体式结构。该实施例中行星离合机构2.3设置于第三级齿轮传动23和第四级齿轮传动24之间,用于实现第三级齿轮传动23和第四级齿轮传动24的接合和分离。
43.一种具体示例中,第五级齿轮传动25的齿轮轴固定有并排的第一齿轮部和第二齿轮部,第一齿轮部与输出齿轮2.1啮合,第二齿轮部为检测齿轮组件的输入齿轮。第一齿轮部和第二齿轮部可以为同一齿轮的两直径不同的部分,当然也可以为两个独立的齿轮。
44.该实施例中,检测齿轮组件2.3的输入齿轮直接与传动齿轮减速组件的最后一级齿轮传动的齿轮轴连接固定,有利于整体结构紧凑。
45.其中,与检测齿轮组件2.3的末级检测齿轮固定连接的末级齿轮轴其中一端部与智能锁的角度传感器配合检测,以获取输出齿轮的转动角度。当然,与角度传感器配合检测的部件也可以是末级检测齿轮。
46.如图4,在一种具体实施方式中,检测齿轮组件2.3包括三级减速,分别为:齿轮轴一2.2.2和齿轮一2.2.1、齿轮二2.2.3和齿轮轴二2.2.4,末级齿轮轴2.2.5及其上的齿轮三(未标号),其中齿轮一2.2.1、齿轮二2.2.3均包括大径齿轮部和小径齿轮部,分别用于与上一级齿轮啮合和与下一级齿轮啮合。
47.具体地,末级齿轮轴其中一端部的周壁具有平行于轴向的扁平部,扁平部至少部分位于智能锁的控制板的电位器孔内部,以获取输出齿轮的转动角度。该检测方式简单易行,减少智能锁空间占据。
48.在一种具体实施方式中,行星离合机构2.3包括太阳轮、行星架2.3.2以转动安装于行星架2.3.2的第一行星轮2.3.5和第二行星轮2.3.6,太阳轮与传动齿轮减速组件的第m级齿轮的齿轮轴同轴转动,行星架2.3.2摆动安装于智能锁的中框2.4,当行星架2.3.2位于第一位置,第一行星轮2.3.5与第m+1级齿轮啮合,以驱动第m+1级齿轮正向转动,当行星架2.3.2位于第二位置,第二行星轮2.3.6与第m+1级齿轮啮合,以驱动第m+1级齿轮反向转动,当行星架还具有位于第一位置和第二位置之间过渡行程区域,当行星架2.3.2处于过渡形成区域时,第一行星轮2.3.5和第二行星轮2.3.6与第m+1级齿轮非接触,驱动部件20与输出齿轮2.1处于离合状态。也就是说,行星离合机构2.3正向、反向转动能够实现不同行星轮与下一级齿轮的啮合,从而实现驱动部件正向、反向动力传递。
49.请结合图3至图7理解,行星离合机构2.3的太阳轮固定于第三级齿轮传动23的转动轴,具体为第三级齿轮传动23上的小径轮,第一行星轮2.3.5和第二行星轮2.3.6可以可
选择地与第四级齿轮传动23上的大径轮啮合。
50.其中,第一行星轮2.3.5和第二行星轮2.3.6转动安装于与行星架2.3.2相对固定的两个齿轮轴2.3.3上,两齿轮轴可以穿过行星架2.3.2然后通过卡簧2.3.1与行星架2.3.2相对限位固定。进一步地,第一行星轮2.3.5和第二行星轮2.3.6与行星架2.3.2之间均设置有阻尼压簧2.3.4。阻尼压簧2.3.4的作用是将弹簧的弹性压力转化为行星轮自转的阻力,当行星轮自转有一点微弱阻力时,行星架才能摆动,才能啮合到下一级齿轮(第四级齿轮传动23)传动,假设没有阻尼压簧,行星轮可能会一直在原地自转,无法公转到啮合位置。为了准确确定行星离合机构2.3的位置,行星架背离行星轮的一侧还固定有离合拨片2.6,用于配合智能锁的控制板上的传感器配合确定行星离合机构的离合位置。这样可以提高系统控制精确性。
51.上述驱动部件20可以为电机,当然也可以为其他动力部件。
52.行星离合机构2.3的离合原理是通过电机(驱动部件20)反转,带动行星架2.3.2上的两行星轮与下一级齿轮脱离啮合,行星架2.3.2上有一伸出轴与离合拔片2.6连接,解离合过程,行星架2.3.2会带动离合拔片2.6在一定角度范围内摆动,从而触发控制板(控制板可以为pcba)上的微动开关,上层控制系统可以记录反馈行星离合机构的实时工作位置(处理离合位置还是接合位置等),形成闭环控制系统。
53.另外,壳主体1.1上还可以设置电池安装仓1.6,用于对智能锁用电部件进行供电。壳主体1.1同时具有传动机构的安装腔和电池安装仓1.6,即二者一体化设计。图3中示出了用于安装电池的主要构件,短电极弹簧1.2、长电极弹簧1.3和绝缘隔板1.4,绝缘隔板1.4可以为绝缘塑料材质,通过胶粘的方式与壳主体1.1固定,对电极起到限位作用,同时起到绝缘隔离的作用。
54.再者,旋钮转动可以触发pcba(英文全文printed circuit board+assembly,简称pcba)上的角度电位器转动,可以实现设备唤醒及记忆功能模块。
55.本实用新型中的智能锁具有上述传动机构,故智能锁也具有传动机构的上述技术效果。
56.关于智能锁的其他结构请参考现有技术,本文不做赘述。
57.以上对本实用新型所提供的一种智能锁及其传动机构进行了详细介绍。本文中应用了具体个例对本实用新型的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本实用新型的方法及其核心思想。应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以对本实用新型进行若干改进和修饰,这些改进和修饰也落入本实用新型权利要求的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1