一种开源的基于总线控制的六自由度机器人平台的制作方法
1.本实用新型涉及机器人技术领域,具体涉及一种开源的基于总线控制的六自由度机器人平台。
背景技术:
2.近几年机器人行业在全球各个领域大放异彩,现有的机器人领域主要分为服务型机器人、移动型机器人、工业机器人几大部分,而工业机器人在整个机器人领域占比极大。现有工业机器人大部分都是以串联机器人为主,目前串联机器人包括串联工业机器人以及串联协作机器人,这两种串联机器人的区别在于串联工业机器人的驱动器等器件与机器人本体没有集成在一起。
技术实现要素:
3.针对现有技术的不足,本实用新型提供了一种开源的基于总线控制的六自由度机器人平台,克服了现有技术的不足,设计合理,通过把驱动机构等器件全部集成在机器人本体中,所占空间更小且更加轻巧灵活,通过控制各个电机输出轴的转动,从而带动抓取工装在三维空间内进行位置的移动,以实现六个电机的相互协作。
4.为实现以上目的,本实用新型通过以下技术方案予以实现:
5.一种开源的基于总线控制的六自由度机器人平台,包括柜体,所述柜体上表面分别固定安装有底座和托盘,所述底座上方固定安装有第一电机驱动机构,所述第一电机驱动机构的输出端与第二电机驱动机构传动连接,所述第二电机驱动机构的输出端连接第二转动轴的一端,所述转动轴的另一端固定安装有第三电机驱动机构,所述第三电机驱动机构的输出端连接第三转动轴的一端,所述第三转动轴的另一端固定安装有第四电机驱动机构,所述第四电机驱动机构的输出端与第五电机驱动机构相连接,所述第五电机驱动机构的输出端与第六电机驱动机构相连接,所述第六电机驱动机构的输出端固定安装有抓取工装,所述抓取工装与托盘相对应。
6.优选地,所述第一电机驱动机构、第二电机驱动机构、第三电机驱动机构、第四电机驱动机构、第五电机驱动机构和第六电机驱动机构均各自分别包括有电机、减速器和驱动电路,所述电机的输出端与减速器传动连接,每个所述电机均通过网线与实时仿真控制器相连接,所述实时仿真控制器通过以太网与pc机相连接。
7.优选地,所述柜体内安装有电源和控制器,所述柜体侧面分别安装与电源控制按钮、急停按钮、风扇、通讯网口插座和电源插座。
8.优选地,所述第六电机驱动机构的输出端固定安装有视觉相机安装座,所述视觉相机安装座上固定安装有视觉相机。
9.优选地,所述柜体下方安装有脚轮。
10.本实用新型提供了一种开源的基于总线控制的六自由度机器人平台。具备以下有益效果:通过rti实时仿真控制器分别对第一电机驱动机构、第二电机驱动机构、第三电机
驱动机构、第四电机驱动机构、第五电机驱动机构和第六电机驱动机构进行实时控制,通过控制各个电机输出轴的转动,从而带动抓取工装在三维空间内进行位置的移动,以实现六个电机的相互协作;并且每个电机驱动机构均可在位置、速度、力矩三种模式下工作,在基本运动学教学实验的基础上可以进行动力学控制科研的开展。通过在上位机中拉取控件并将变量与控件连接即可控制变量的值,以此方式搭建可视化易操作的界面,从而实现实时修改、快速开发的目的。
附图说明
11.为了更清楚地说明本实用新型或现有技术中的技术方案,下面将对现有技术描述中所需要使用的附图作简单地介绍。
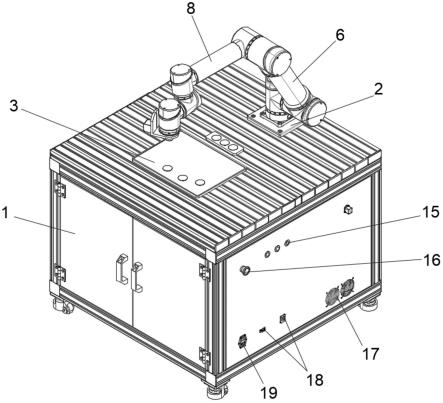
12.图1本实用新型的结构示意图;
13.图2本实用新型中电机驱动机构的结构示意图;
14.图中标号说明:
15.1、柜体;2、底座;3、托盘;4、第一电机驱动机构;5、第二电机驱动机构;6、第二转动轴;7、第三电机驱动机构;8、第三转动轴;9、第四电机驱动机构;10、第五电机驱动机构;11、第六电机驱动机构;12、抓取工装;13、视觉相机安装座;14、视觉相机;15、电源控制按钮;16、急停按钮;17、风扇;18、通讯网口插座;19、电源插座;20、脚轮。
具体实施方式
16.为使本实用新型的目的、技术方案和优点更加清楚,下面将结合本实用新型中的附图,对本实用新型中的技术方案进行清楚、完整地描述。
17.实施例一,如图1-2所示,一种开源的基于总线控制的六自由度机器人平台,包括柜体1,柜体1上表面分别固定安装有底座2和托盘3,底座2上方固定安装有第一电机驱动机构4,第一电机驱动机构4的输出端与第二电机驱动机构5传动连接,第二电机驱动机构5的输出端连接第二转动轴6的一端,转动轴6的另一端固定安装有第三电机驱动机构7,第三电机驱动机构7的输出端连接第三转动轴8的一端,第三转动轴8的另一端固定安装有第四电机驱动机构9,第四电机驱动机构9的输出端与第五电机驱动机构10相连接,第五电机驱动机构10的输出端与第六电机驱动机构11相连接,第六电机驱动机构11的输出端固定安装有抓取工装12,抓取工装12与托盘3相对应。
18.第一电机驱动机构4、第二电机驱动机构5、第三电机驱动机构7、第四电机驱动机构9、第五电机驱动机构10和第六电机驱动机构11均各自分别包括有电机、减速器和驱动电路,电机的输出端与减速器传动连接,每个电机均通过网线与实时仿真控制器相连接,实时仿真控制器通过以太网与pc机相连接。
19.工作原理:
20.本技术基于ethercat总线控制,平台控制器采用rti实时仿真控制器,软件上采用matlab/simulink编程,机器人运动学、动力学、视觉/力觉传感器采集、运动规划、系统集成等每一个实验例程的代码均可在matlab/simulink中编写。在进行控制时,通过rti实时仿真控制器分别对第一电机驱动机构4、第二电机驱动机构5、第三电机驱动机构7、第四电机驱动机构9、第五电机驱动机构10和第六电机驱动机构11进行实时控制,通过控制各个电机
输出轴的转动,从而带动抓取工装12在三维空间内进行位置的移动,以实现六个电机的相互协作;并且每个电机驱动机构均可在位置、速度、力矩三种模式下工作,在基本运动学教学实验的基础上可以进行动力学控制科研的开展。在本实施例中,通过matlab/simulink搭建好控制算法模型,编译并导入rti中,打开rti实时仿真控制器的pc机软件即可实时找到控制算法模型中的控制变量,通过在上位机中拉取控件并将变量与控件连接即可控制变量的值,以此方式搭建可视化易操作的界面,从而实现实时修改、快速开发的目的。
21.实施例二,作为实施例一的进一步优选方案,柜体1内安装有电源和控制器,柜体1侧面分别安装与电源控制按钮15、急停按钮16、风扇17、通讯网口插座18和电源插座19。其中,电源控制按钮15和急停按钮16均通过控制器与电源相连接,通过急停按钮16,当机器人操作过程中出现紧急情况时可以按11切断机器人平台电源来保护。
22.实施例三,作为实施例一的进一步优选方案,第六电机驱动机构11的输出端固定安装有视觉相机安装座13,视觉相机安装座13上固定安装有视觉相机14。且视觉相机14的信号输出端通过信号采集装置与rti实时仿真控制器相连接,通过视觉相机14可实时采集抓取工装12的实时位置,以便于对机器人的实时控制。
23.实施例四,作为实施例一的进一步优选方案,柜体1下方安装有脚轮20。通过脚轮20以便于对整个装置位置的移动。
24.以上实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1