一种开源的基于总线控制的六自由度并联机器人平台的制作方法
1.本实用新型涉及机器人技术领域,具体涉及一种开源的基于总线控制的六自由度并联机器人平台。
背景技术:
2.近几年机器人行业在全球各个领域大放异彩,现有的机器人领域主要分为服务型机器人、移动型机器人、工业机器人几大部分,而工业机器人在整个机器人领域占比极大。
3.目前的移动机器人一般都是作为运动载体,通过搭载传感器,或在其平台上安装机械臂来完成自主导航、探测或抓取等特定任务。其机动性能弱,无法满足大刚度、高精密的工况环境下的作业。
技术实现要素:
4.针对现有技术的不足,本实用新型提供了一种开源的基于总线控制的六自由度并联机器人平台,克服了现有技术的不足,设计合理,通过仿真控制器输出控制信号,再有处理器进行信号处理后,再分别控制各个电动缸的伸缩端进行伸缩运动,从而带动动平台进行位姿的变化调整,以满足装配所需的位姿要求。
5.为实现以上目的,本实用新型通过以下技术方案予以实现:
6.一种开源的基于总线控制的六自由度并联机器人平台,包括电气柜柜体,所述电气柜柜体上固定安装有定平台,所述定平台上表面沿边缘位置通过连接件安装有若干电动缸,所述电动缸的伸缩端均通过连接件安装在动平台的下表面,所述电气柜柜体内部安装有若干伺服驱动器,每个所述伺服驱动器分别各自对应连接一个电动缸上的伺服电机;所述电气柜柜体内部安装有处理器和电源,所述电动缸均通过处理器与电源相连接,所述处理器实通过网线与时仿真控制器相连接。
7.优选地,所述电动缸设置有六个,且每两个电动缸为一组,每相邻两组电动缸之间呈120度夹角分布。
8.优选地,所述电气柜柜体侧面分别设置有电源控制按钮、急停按钮、通风口、风扇、通讯网口插座和电源插座。
9.本实用新型提供了一种开源的基于总线控制的六自由度并联机器人平台。具备以下有益效果:通过仿真控制器输出控制信号,再有处理器进行信号处理后,再分别控制各个电动缸的伸缩端进行伸缩运动,从而带动动平台进行位姿的变化调整,以满足装配所需的位姿要求。并且每个电动缸均可在位置、速度、力矩三种模式下工作,在基本运动学教学实验的基础上可以进行动力学控制科研的开展。通过在上位机中拉取控件并将变量与控件连接即可控制变量的值,以此方式搭建可视化易操作的界面,从而实现实时修改、快速开发的目的。
附图说明
10.为了更清楚地说明本实用新型或现有技术中的技术方案,下面将对现有技术描述中所需要使用的附图作简单地介绍。
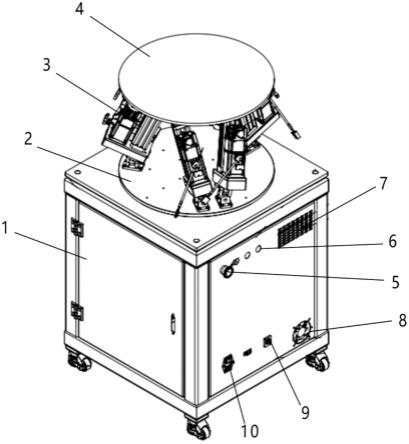
11.图1本实用新型的结构示意图;
12.图中标号说明:
13.1、电气柜柜体;2、定平台;3、电动缸;5、急停按钮;6、电源控制按钮;7、通风口;8、风扇;9、通讯网口插座;10、电源插座。
具体实施方式
14.为使本实用新型的目的、技术方案和优点更加清楚,下面将结合本实用新型中的附图,对本实用新型中的技术方案进行清楚、完整地描述。
15.实施例一,如图1所示,一种开源的基于总线控制的六自由度并联机器人平台,包括电气柜柜体1,所述电气柜柜体1上固定安装有定平台2,所述定平台2上表面沿边缘位置通过连接件安装有若干电动缸3,所述电动缸3的伸缩端均通过连接件安装在动平台4的下表面,所述电气柜柜体1内部安装有若干伺服驱动器,每个所述伺服驱动器分别各自对应连接一个电动缸3上的伺服电机;所述电气柜柜体1内部安装有处理器和电源,所述电动缸3均通过处理器与电源相连接,所述处理器实通过网线与时仿真控制器相连接。
16.工作原理:
17.本申请基于ethercat总线控制,平台控制器采用rti实时仿真控制器,软件上采用matlab/simulink编程,机器人运动学、动力学、视觉/力觉传感器采集、运动规划、系统集成等每一个实验例程的代码均可在matlab/simulink中编写。在进行控制时,通过仿真控制器输出控制信号,再有处理器进行信号处理后,再分别控制各个电动缸3的伸缩端进行伸缩运动,从而带动动平台4进行位姿的变化调整,以满足装配所需的位姿要求。
18.在本实施例中,通过matlab/simulink搭建好控制算法模型,编译并导入rti实时仿真控制器中,打开rti实时仿真控制器的上位机软件即可实时找到控制算法模型中的控制变量,通过在上位机中拉取控件并将变量与控件连接即可控制变量的值,以此方式搭建可视化易操作的界面,从而实现实时修改、快速开发的目的。并且每个电动缸3均可在位置、速度、力矩三种模式下工作,在基本运动学教学实验的基础上可以进行动力学控制科研的开展。通过在上位机中拉取控件并将变量与控件连接即可控制变量的值,以此方式搭建可视化易操作的界面,从而实现实时修改、快速开发的目的。
19.实施例二,作为实施例一的进一步优选方案,如图1所示,所述电动缸3设置有六个,且每两个电动缸3为一组,每相邻两组电动缸3之间呈120度夹角分布。从而使各个电动缸3对动平台4的支撑力更均匀。
20.实施例三,作为实施例一的进一步优选方案,所述电气柜柜体1侧面分别设置有电源控制按钮6、急停按钮5、通风口7、风扇8、通讯网口插座9和电源插座10。其中,电源控制按钮6和急停按钮5均通过处理器与电源相连接,通过急停按钮5,当机器人操作过程中出现紧急情况时可以按11切断机器人平台电源来保护。
21.以上实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前
述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的精神和范围。
技术特征:
1.一种开源的基于总线控制的六自由度并联机器人平台,其特征在于:包括电气柜柜体(1),所述电气柜柜体(1)上固定安装有定平台(2),所述定平台(2)上表面沿边缘位置通过连接件安装有若干电动缸(3),所述电动缸(3)的伸缩端均通过连接件安装在动平台(4)的下表面,所述电气柜柜体(1)内部安装有若干伺服驱动器,每个所述伺服驱动器分别各自对应连接一个电动缸(3)上的伺服电机;所述电气柜柜体(1)内部安装有处理器和电源,所述电动缸(3)均通过处理器与电源相连接,所述处理器实通过网线与时仿真控制器相连接。2.根据权利要求1所述的一种开源的基于总线控制的六自由度并联机器人平台,其特征在于:所述电动缸(3)设置有六个,且每两个电动缸(3)为一组,每相邻两组电动缸(3)之间呈120度夹角分布。3.根据权利要求1所述的一种开源的基于总线控制的六自由度并联机器人平台,其特征在于:所述电气柜柜体(1)侧面分别设置有电源控制按钮(6)、急停按钮(5)、通风口(7)、风扇(8)、通讯网口插座(9)和电源插座(10)。
技术总结
一种开源的基于总线控制的六自由度并联机器人平台,包括电气柜柜体,电气柜柜体上固定安装有定平台,定平台上表面沿边缘位置通过连接件安装有若干电动缸,电动缸的伸缩端均通过连接件安装在动平台的下表面,电气柜柜体内部安装有若干伺服驱动器,每个伺服驱动器分别各自对应连接一个电动缸上的伺服电机;电气柜柜体内部安装有处理器和电源,电动缸均通过处理器与电源相连接,处理器实通过网线与时仿真控制器相连接。本实用新型克服了现有技术的不足,通过仿真控制器输出控制信号,再有处理器进行信号处理后,再分别控制各个电动缸的伸缩端进行伸缩运动,从而带动动平台进行位姿的变化调整,以满足装配所需的位姿要求。以满足装配所需的位姿要求。以满足装配所需的位姿要求。
技术研发人员:王晓明 王涛 马鹏程 李鹏萱 韩非
受保护的技术使用者:南京雅可比机器人科技有限公司
技术研发日:2022.05.10
技术公布日:2022/9/26
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1