一种基于液压驱动的下肢搬运助力外骨骼机器人
1.本实用新型涉及外骨骼机器人,具体涉及一种基于液压驱动的下肢搬运助力外骨骼机器人。
背景技术:
2.外骨骼原指生物界中为生物提供保护、支持的坚硬外部结构,随着物流、建筑等行业的快速发展,如何高效且安全的搬运大尺寸重物已经成为亟待解决的问题。如果采用传统人工搬运,不仅工作效率低,而且会对搬运工造成不可逆的健康问题,如肌肉萎缩、骨质疏松、压疮等。
3.而目前市场上的助力外骨骼机器人又普遍存在如下问题:1.专为搬运工人设计的助力外骨骼较少,大部分外骨骼机构用于医疗康复和军事。2.已经投入市场的搬运助力外骨骼的助力力度较小,只能用于较轻重物的搬运,只有助力没有减负功能。同时外骨骼自身较重,又在一定程度上增加穿戴者的负重。
技术实现要素:
4.本实用新型的目的在于提供一种可以穿戴、集助力和减负为一体、基于液压驱动的下肢搬运助力外骨骼机器人,提高人的负载能力,有效增强人体机能,增加搬运工人的工作效率。
5.为了实现上述目的,本实用新型采用如下技术方案:
6.本实用新型包括背板、肩关节连接机构、髋关节助力机构、膝关节连接机构和足部机构;所述的背板包括肩部连接板、腰部连接板和纵向连接板;一块肩部连接板中上下排布的两个水平滑槽分别与另一块肩部连接板位置对齐的通孔通过螺栓和螺母固定连接,一块腰部连接板中上下排布的两个水平滑槽分别与另一块腰部连接板位置对齐的通孔通过螺栓和螺母固定连接;每块肩部连接板与一块纵向连接板顶端固定,每块纵向连接板底端处左右排布的两个竖直滑槽分别与一块腰部连接板位置对齐的螺纹孔通过螺栓固定连接;两块纵向连接板内侧均固定有背带;所述的肩关节连接机构包括肩臂连接件、肩关节回转轴和肩背连接件;所述肩臂连接件的一端与肩背连接件一端通过竖直设置的肩关节回转轴铰接;所述的肩关节连接机构设有两个,每个肩关节连接机构的肩臂连接件另一端与一块上臂板铰接,每个肩关节连接机构的肩背连接件另一端与一块肩部连接板铰接;肩臂连接件与上臂板的铰接处轴线沿前后方向布置,肩背连接件与肩部连接板的铰接处轴线沿左右方向布置;两块上臂板内侧均固定有绑带。
7.所述的髋关节助力机构包括髋高调节板、固定片、支撑板、髋宽调节板、髋背回转件、双作用液压缸、压力传感器、腿外套、大腿内衬和大腿板;所述的支撑板呈l型,一个臂开有前后方向间距排布的三个以上通孔,另一个臂与双作用液压缸的缸体铰接,两个臂交接处与髋背回转件一端构成回转副;髋宽调节板上的两个通孔与支撑板上的其中两个通孔通过螺栓和螺母连接;所述固定板的顶端与髋宽调节板固定,底端与髋高调节板铰接;所述的
髋高调节板开有沿前后方向间距排布的两列通孔,每列包含沿竖直方向间距排布的多个通孔;髋高调节板上同一高度位置的其中两个通孔与大腿板顶端的两个通孔通过螺栓和螺母固定连接;所述双作用液压缸的活塞杆与大腿板中部铰接,双作用液压缸经换向阀与控制器连接,换向阀由控制器控制;所述大腿板的内侧固定有腿外套,腿外套内固定有大腿内衬;大腿内衬的内壁前、后部均固定有一个压力传感器,压力传感器的信号输出端与控制器连接。所述的髋关节助力机构设有两个,每个髋关节助力机构的髋背回转件另一端与背板的一块腰部连接板铰接,且铰接处轴线竖直设置。
8.所述的膝关节连接机构包括大腿连接板、前摇杆、后摇杆、小腿连接板和小腿板;所述前摇杆和后摇杆的一端与大腿连接板底端的两个铰接位分别铰接,且前摇杆的铰接位高于后摇杆的铰接位;前摇杆和后摇杆的另一端均与小腿连接板顶端铰接;所述的小腿连接板开有沿前后方向间距排布的两列通孔,每列包含沿竖直方向间距排布的多个通孔;小腿连接板上同一高度位置的其中两个通孔与一个小腿板顶端的两个通孔通过螺栓和螺母固定连接;所述的膝关节连接机构设有两个,每个膝关节连接机构的大腿连接板与一个髋关节助力机构的大腿板固定。
9.所述的足部机构包括踝关节连接板和足托;所述的踝关节连接板底端与足托铰接;所述的足托上固定有绑带;足部机构设有两个,每个足部机构的踝关节连接板与一个膝关节连接机构的小腿板固定。
10.优选地,所述的大腿连接板开有沿前后方向间距排布的两列通孔,每列包含沿竖直方向间距排布的多个通孔;大腿连接板上同一高度位置的其中两个通孔与大腿板底端的两个通孔通过螺栓和螺母固定连接。
11.优选地,所述的大腿连接板上位于前摇杆前侧位置固定有前踢限位件。
12.与现有技术相比,本实用新型的有益效果是:
13.1、本实用新型宽度小,贴附于人体侧部与后背处,不仅能助力穿戴者行走、弯腰、弯腰后起身以及下蹲后起立等动作,从而助力搬运活动,而且不影响人体侧抬或侧放大臂、内旋或外旋大臂、侧抬或侧放大腿、内旋或外旋大腿等自由运动,使得穿戴者受到限制小,活动更自如,适应性好,提高人的负载能力,有效增强人体机能,增加搬运工人的工作效率。
14.2、本实用新型的背板宽度和高度、髋宽调节板与支撑板的相对伸缩量、大腿板的高度以及小腿连接板的高度均可调,能适应不同穿戴者的身体尺寸,具有更好的适应性。
15.3、本实用新型的动力只需要一个双作用液压缸,能耗较低,可极大地增加外骨骼的续航,不需要经常充电,提高了搬运工人的工作效率。
16.4、本实用新型的各零件结构简单、轻便,加工方便,重量小,成本低,减小穿戴者的负重,行动更轻便。
附图说明
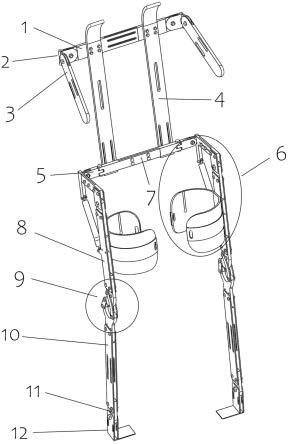
17.图1为本实用新型的整体结构立体图;
18.图2为本实用新型中肩关节连接机构与上臂板和腰部连接板的装配立体图;
19.图3为本实用新型中髋关节助力机构的结构立体图;
20.图4为本实用新型中膝关节连接机构的结构立体图;
21.图5为本实用新型中髋关节助力机构与背板的装配立体图;
22.图中:1、肩部连接板;2、肩关节连接机构;2.1、肩臂连接件;2.2、肩关节回转轴;2.3、肩背连接件;3、上臂板;4、纵向连接板;5、髋背回转件;6、髋关节助力机构;6.1、支撑板;6.2、髋宽调节板;6.3、固定片;6.4髋高调节板;6.5、双作用液压缸;6.6、压力传感器;6.7、腿外套;6.8、大腿内衬;7、腰部连接板;8、大腿板;9、膝关节连接机构;9.1、大腿连接板;9.2、前摇杆;9.3、后摇杆;9.4、前踢限位件;9.5、小腿连接板;10、小腿板;11、踝关节连接板;12、足托。
具体实施方式
23.下面结合附图对本实用新型的技术方案进行清楚、完整地描述。
24.如图1、图2和图5所示,一种基于液压驱动的下肢搬运助力外骨骼机器人,包括背板、肩关节连接机构2、髋关节助力机构6、膝关节连接机构9和足部机构;背板包括肩部连接板1、腰部连接板7和纵向连接板4;一块肩部连接板1中上下排布的两个水平滑槽分别与另一块肩部连接板1位置对齐的通孔通过螺栓和螺母固定连接,一块腰部连接板7中上下排布的两个水平滑槽分别与另一块腰部连接板7位置对齐的通孔通过螺栓和螺母固定连接;每块肩部连接板1与一块纵向连接板4顶端固定,每块纵向连接板4底端处左右排布的两个竖直滑槽分别与一块腰部连接板7位置对齐的螺纹孔通过螺栓固定连接;两块纵向连接板4内侧均固定有背带;通过调节螺栓和螺母在水平滑槽或竖直滑槽的位置,可调节背板的宽度和高度。肩关节连接机构2包括肩臂连接件2.1、肩关节回转轴2.2和肩背连接件2.3;肩臂连接件2.1一端与肩背连接件2.3一端通过竖直设置的肩关节回转轴2.2铰接;肩关节连接机构2设有两个,每个肩关节连接机构2的肩臂连接件2.1另一端与一块上臂板3铰接,每个肩关节连接机构2的肩背连接件2.3另一端与一块肩部连接板1铰接;肩臂连接件2.1与上臂板3的铰接处轴线沿前后方向布置,肩背连接件2.3与肩部连接板1的铰接处轴线沿左右方向布置;两块上臂板3内侧均固定有绑带。
25.如图1、图3和图5所示,髋关节助力机构6包括髋高调节板6.4、固定片6.3、支撑板6.1、髋宽调节板6.2、髋背回转件5、双作用液压缸6.5、压力传感器6.6、腿外套6.7、大腿内衬6.8和大腿板8;支撑板6.1呈l型,一个臂开有前后方向间距排布的三个以上通孔,另一个臂与双作用液压缸6.5的缸体铰接,两个臂交接处与髋背回转件5一端构成回转副;髋宽调节板6.2上的两个通孔与支撑板6.1上的其中两个通孔通过螺栓和螺母连接,通过髋宽调节板6.2与支撑板6.1上的不同通孔连接以适应不同髋宽的穿戴者;固定板6.3顶端与髋宽调节板6.2固定,底端与髋高调节板6.4铰接;髋高调节板6.4开有沿前后方向间距排布的两列通孔,每列包含沿竖直方向间距排布的多个通孔;髋高调节板6.4上同一高度位置的其中两个通孔与大腿板8顶端的两个通孔通过螺栓和螺母固定连接;通过髋高调节板6.4上不同高度的两个通孔与大腿板8连接,可调节髋宽调节板6.2至膝关节距离;双作用液压缸6.5的活塞杆与大腿板8中部铰接,双作用液压缸6.5经换向阀与控制器连接,换向阀由控制器控制;大腿板8内侧固定有腿外套6.7,腿外套6.7内固定有大腿内衬6.8;大腿内衬6.8的内壁前、后部均固定有一个压力传感器6.6,压力传感器6.6的信号输出端与控制器连接。髋关节助力机构6设有两个,每个髋关节助力机构6的髋背回转件5另一端与背板的一块腰部连接板7铰接,且铰接处轴线竖直设置。
26.如图1和图4所示,膝关节连接机构9包括大腿连接板9.1、前摇杆9.2、后摇杆9.3、
小腿连接板9.5和小腿板10;前摇杆9.2和后摇杆9.3的一端与大腿连接板9.1底端的两个铰接位分别铰接,且前摇杆9.2的铰接位高于后摇杆9.3的铰接位;前摇杆9.2和后摇杆9.3的另一端均与小腿连接板9.5顶端铰接;小腿连接板9.5开有沿前后方向间距排布的两列通孔,每列包含沿竖直方向间距排布的多个通孔;小腿连接板9.5上同一高度位置的其中两个通孔与一个小腿板10顶端的两个通孔通过螺栓和螺母固定连接;通过小腿连接板9.5上不同高度的两个通孔与小腿板10连接,可调节膝关节与小腿板10间的距离。膝关节连接机构9设有两个,每个膝关节连接机构9的大腿连接板9.1与一个髋关节助力机构6的大腿板8固定。
27.如图1所示,足部机构包括踝关节连接板11和足托12;踝关节连接板11底端与足托12铰接;足托12上固定有绑带;足部机构设有两个,每个足部机构的踝关节连接板11与一个膝关节连接机构9的小腿板10固定。
28.作为优选,大腿连接板9.1开有沿前后方向间距排布的两列通孔,每列包含沿竖直方向间距排布的多个通孔;大腿连接板9.1上同一高度位置的其中两个通孔与大腿板8底端的两个通孔通过螺栓和螺母固定连接;通过大腿连接板9.1上不同高度的两个通孔与大腿板8连接,可调节大腿板8与膝关节的距离。
29.作为优选,大腿连接板9.1上位于前摇杆9.2前侧位置固定有前踢限位件9.4,前摇杆9.2通过前踢限位件9.4进行前摆限位,后摇杆9.3对前摇杆9.2进行后摆限位。
30.本实用新型的工作原理如下:
31.调节背板的宽度和高度,调节髋宽调节板6.2与支撑板6.1上的不同通孔连接,调节髋高调节板6.4上不同高度的两个通孔与大腿板8连接,调节大腿连接板9.1上不同高度的两个通孔与大腿板8连接,并调节小腿连接板9.5上不同高度的两个通孔与小腿板10连接,以适应穿戴者的身体尺寸;将穿戴者的上身使用两块纵向连接板4上的背带绑缚,两只大臂分别使用一块上臂板3上的绑带绑缚,两只大腿通过分别通过一个髋关节助力机构6的腿外套6.7和大腿内衬6.8定位,两只脚掌分别通过一个足部机构中足托12上的绑带绑缚。
32.穿戴者行走过程中,当大腿内衬6.8上前部压力传感器检测到压力(大腿抬升)时,控制器控制髋关节助力机构6中双作用液压缸的活塞杆伸出,驱动大腿板8前摆,当大腿内衬6.8上后部压力传感器检测到压力(大腿下落)时,控制器控制髋关节助力机构6中双作用液压缸的活塞杆缩回,驱动大腿板8后摆,从而两个髋关节助力机构6助力穿戴者两只大腿交替式前、后摆。
33.穿戴者弯腰或起身过程中,当大腿内衬6.8上前部压力传感器检测到压力(弯腰)时,控制器控制两个髋关节助力机构6中双作用液压缸的活塞杆同步伸出,驱动支撑板6.1、髋宽调节板6.2、固定片6.3、髋背回转件5和背板前摆,保证上身在自重下顺利完成弯腰动作;当大腿内衬6.8上后部压力传感器检测到压力(起身)时,控制器控制两个髋关节助力机构6中双作用液压缸的活塞杆同步缩回,驱动支撑板6.1、髋宽调节板6.2、固定片6.3、髋背回转件5和背板后摆,从而助力穿戴者完成起身动作。
34.穿戴者下蹲时,前摇杆和后摇杆均后摆,大腿内衬6.8上后部压力传感器检测到压力,控制器控制两个髋关节助力机构6中双作用液压缸的活塞杆同步伸出,从而减缓下蹲速度,避免对穿戴者的膝关节造成冲击,且由于后摇杆对前摇杆存在限位,仅支持半蹲;穿戴者起立时,前摇杆和后摇杆均前摆,大腿内衬6.8上前部压力传感器检测到压力,控制器控
制两个髋关节助力机构6中双作用液压缸的活塞杆同步缩回,从而助力穿戴者完成起立动作。
35.穿戴者侧抬、侧放大臂时,肩背连接件2.3与肩部连接板1可自由相对转动;穿戴者内旋或外旋大臂时,肩臂连接件2.1与肩背连接件2.3可自由相对转动;穿戴者侧抬、侧放大腿时支撑板6.1与髋背回转件5可自由相对转动,穿戴者内旋或外旋大腿时,髋背回转件与腰部连接板7可自由相对转动。
36.其中,穿戴者上肢搬运货物时,货物重力、背板重力以及穿戴者上身自重可通过上臂板和背板传递至髋关节助力机构6,髋关节助力机构6的大腿板再通过膝关节连接机构9传递至足部机构,最终由足部机构传至地面,可见,本实用新型外骨骼机器人可起到良好的支撑作用。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1