一种打磨机器人驱动机构的制作方法
1.本实用新型涉及打磨机器人技术领域,特别是涉及一种打磨机器人驱动机构。
背景技术:
2.打磨机器人是工业机器人的一种,打磨机器人一般从事的是棱角去毛刺、焊缝打磨、内腔内控去毛刺等工作。采用智能化代替人工打磨,提高工作效率以及保证产品优品率。驱动组件为打磨机器人中最重要的组成部分。
3.授权公告号为cn215317810u的中国专利公开了一种打磨机器人,该打磨机器人的打磨轮随自转主轴转动的同时绕公转主轴转动,提高了打磨的效率和打磨效果,且不会受到打磨时产生的粉尘影响;同时相比于现有的打磨器械,将机械臂与打磨单元结合,增加了打磨单元的灵活性,可以实现多角度,多方位的打磨。
4.但是该打磨机器人在实际打磨的时候缺乏对打磨过程中产生的灰尘进行清理的结构,弥散的灰尘落在设备和打磨的工件上难以清理,并且灰尘还会对机器人机械臂之间转动连接部的转动造成影响。
技术实现要素:
5.本实用新型目的是针对背景技术中存在的问题,提出一种打磨机器人驱动机构。
6.本实用新型的技术方案:一种打磨机器人驱动机构,包括底座、风机、驱动箱、转轴、支撑臂b和打磨电机。底座上转动设置转台,底座内设置电机a,电机a驱动连接转台。底座内设置过滤板,底座上设置与其内部连通的排气孔,过滤板位于排气孔与抽屉之间并与抽屉的侧板抵接。风机设置在排气孔内,风机的进气端朝向底座的内部。转台上转动设置支撑臂a,转台上设置电机b,电机b驱动连接支撑臂a。驱动箱转动设置在支撑臂a上,支撑臂a上设置电机c,电机c驱动连接驱动箱。驱动箱内设置电机d,电机d驱动连接转轴,转轴的另一端连接支撑臂b,支撑臂b与驱动箱之间设置于二者内部均连通的套管。打磨电机转动设置在支撑臂b上,支撑臂b上设置电机e,电机e驱动连接打磨电机,打磨电机驱动连接砂轮,打磨电机的外壳上设置集尘罩,砂轮位于集尘罩内,集尘罩上设置与其内部连通的吸尘管道组件,吸尘管道组件的输出端插入底座内并与其内部连通,且吸尘管道组件的输出端位于抽屉的开口上方。优选的,吸尘管道组件包括连接管a、连接管b、连接管c和连接管d。支撑臂a上转动设置转接帽a和转接帽b,转接帽a和转接帽b内部连通并转动连接。连接管a 设置在转接帽a上并与其内部连通,连接管a的另一端插入底座内并位于抽屉的上方。连接管b设置在转接帽b上并与其内部连通,连接管b的另一端沿驱动箱与支撑臂a的转接件侧面插入其内部并与其内部连通。连接管c设置在支撑臂b上,连接管c的一端与连接管d的输出端连接并内部连通,连接管c的另一端插入套管内。连接管d的输入端插入集尘罩内并与其内部连通。
7.优选的,支撑臂b上转动设置安装板,打磨电机设置在安装板上,电机e 驱动连接安装板。
8.优选的,底座内设置支架,支架位于抽屉的上方,电机a设置在支架上,抽屉上设置把手。
9.优选的,抽屉外侧挡板靠近底座的一侧设置磁封条,底座靠近抽屉外侧挡板的一侧设置电磁密封圈,电磁密封圈与磁封条磁吸配合。
10.优选的,底座排气孔内设置防尘网。
11.优选的,底座的底部设置安装孔。
12.与现有技术相比,本实用新型具有如下有益的技术效果:
13.通过设置风机、过滤板与抽屉的结构,砂轮在飞速转动并与加工件接触时产生的灰尘在集尘罩的收集下沿着各连接管并最终进入底座内,灰尘与空气在过滤板的分离作用下,空气被风机送出,而灰尘则自然掉落在抽屉内,该结构实现了打磨过程除尘的功能,同时由于集尘罩跟随砂轮的角度变化而变动角度,使砂轮在打磨的过程中灰尘完全被吸收,不会对台面造成任何影响,保障了加工操作台的整洁,而灰尘集中在抽屉内,当设备处于工作间隙的时候可以抽出抽屉将灰尘处理掉即可,操作简单方便。
附图说明
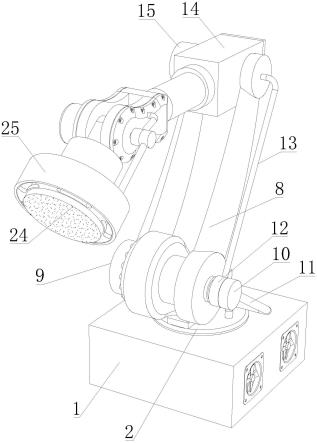
14.图1为本实用新型中一种实施例的结构示意图;
15.图2为图1中部分连接件的内部结构图;
16.图3为底座的内部结构图。
17.附图标记:1、底座;2、转台;3、支架;4、电机a;5、抽屉;6、过滤板; 7、风机;8、支撑臂a;9、电机b;10、转接帽a;11、连接管a;12、转接帽 b;13、连接管b;14、驱动箱;15、电机c;16、电机d;17、转轴;18、支撑臂b;19、套管;20、打磨电机;21、电机e;22、连接管c;23、连接管d; 24、砂轮;25、集尘罩。
具体实施方式
18.实施例一
19.如图1-3所示,本实用新型提出的一种打磨机器人驱动机构,包括底座1、风机7、驱动箱14、转轴17、支撑臂b18和打磨电机20。底座1上转动设置转台2,底座1内设置电机a4,电机a4驱动连接转台2。底座1内设置过滤板6,底座1上设置与其内部连通的排气孔,过滤板6位于排气孔与抽屉5之间并与抽屉5的侧板抵接。风机7设置在排气孔内,风机7的进气端朝向底座1的内部。转台2上转动设置支撑臂a8,转台2上设置电机b9,电机b9驱动连接支撑臂a8。驱动箱14转动设置在支撑臂a8上,支撑臂a8上设置电机c15,电机 c15驱动连接驱动箱14。驱动箱14内设置电机d16,电机d16驱动连接转轴17,转轴17的另一端连接支撑臂b18,支撑臂b18与驱动箱14之间设置于二者内部均连通的套管19。打磨电机20转动设置在支撑臂b18上,支撑臂b18上设置电机e21,电机e21驱动连接打磨电机20,打磨电机20驱动连接砂轮24,打磨电机20的外壳上设置集尘罩25,砂轮24位于集尘罩25内,集尘罩25上设置与其内部连通的吸尘管道组件,吸尘管道组件的输出端插入底座1内并与其内部连通,且吸尘管道组件的输出端位于抽屉5的开口上方。
20.本实施例中,将本装置安装在操作台上,当需要对工件进行打磨的时候,电机a4可以控制转台2的角度变化,使砂轮24的朝向改变,电机b9在工作时驱动支撑臂a8转动,支撑
臂a8的仰角变化使砂轮与待加工件之间的距离发生变化,电机c15在控制驱动箱14转动的时候会使支撑臂b18与砂轮24整体的垂直角度发生变化,而电机d16则可以控制支撑臂b18与砂轮24整体的水平翻转,电机e21则控制支撑臂b18翻转,使打磨电机20与砂轮24整体的角度进一步变化,增大砂轮24的角度变化范围,以上各部件的连接关系,使砂轮能够完成对加工件各个面的打磨。而打磨过程中会产生飞灰,此时启动风机7,风机 7抽取底座1内的空气使底座1内形成负压,空气与飞灰从集尘罩25的入口进入吸尘管道组件内,并最终进入底座1内,灰尘与空气在过滤板6的分离作用下,灰尘落在抽屉5内,而空气被风机7排出。
21.实施例二
22.如图1和2所示,本实用新型提出的一种打磨机器人驱动机构,相较于实施例一,吸尘管道组件包括连接管a11、连接管b13、连接管c22和连接管d23。支撑臂a8上转动设置转接帽a10和转接帽b12,转接帽a10和转接帽b12内部连通并转动连接。连接管a11设置在转接帽a10上并与其内部连通,连接管a11 的另一端插入底座1内并位于抽屉5的上方。连接管b13设置在转接帽b12上并与其内部连通,连接管b13的另一端沿驱动箱14与支撑臂a8的转接件侧面插入其内部并与其内部连通。连接管c22设置在支撑臂b18上,连接管c22的一端与连接管d23的输出端连接并内部连通,连接管c22的另一端插入套管19 内。连接管d23的输入端插入集尘罩25内并与其内部连通。
23.本实施例中,使用一根连接管连接集尘罩25与底座1,当砂轮24的角度和位置发生变化的时候,该管道很容易与机械臂之间发生缠绕现象,而使用本实施例的结构,灰尘进入集尘罩内后,依次通过连接管d23、连接管c22、套管19、驱动箱14、连接管b13和连接管a11并最终进入底座1内,各连接管之间连通配合,在不影响机械臂驱动砂轮24变动的同时还有效的将灰尘完全吸附。
24.上面结合附图对本实用新型的实施方式作了详细说明,但是本实用新型并不限于此,在所属技术领域的技术人员所具备的知识范围内,在不脱离本实用新型宗旨的前提下还可以作出各种变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1