一种送餐服务机器人的制作方法
1.本实用新型涉及服务机器人技术领域,具体涉及一种送餐服务机器人。
背景技术:
2.ros机器人操作系统的不断发展,基于slam技术进行地图构建和自主导航等,实现服务机器人运动学控制,并通过软硬件结合的方式,掌握机器人最基本的机构组成,并实现对机器人的控制。
3.目前市场上的的送餐服务机器人通常采用深度相机进行探测路面情况,在面对复杂的场景时,容易出现深度相机无法识别的物体,导致送餐过程容易出现碰撞和送餐位置不准确的问题,使用灵活性较低。
技术实现要素:
4.为解决现有技术中的问题,本实用新型提供一种送餐服务机器人,解决了现有技术中送餐服务机器人在面对复杂的场景时,容易出现深度相机无法识别的物体,导致送餐过程容易出现碰撞和送餐位置不准确的问题。
5.本实用新型一种送餐服务机器人,包括送餐托盘组件和送餐移动平台,所述生产托盘组件设置在所述送餐移动平台上,所述送餐托盘组件用于放置需要输送的菜品,所述送餐移动平台上设置有深度相机、激光雷达组和超声波传感器,所述深度相机和所述激光雷达组用于识别物体和移动导航,所述超声波传感器用于识别所述深度相机和所述激光雷达组无法感知的障碍物。
6.本实用新型作进一步改进,激光雷达组包括两组激光雷达,两组激光雷达对称设置在所述移动平台运动方向的前端和后端。
7.本实用新型作进一步改进,送餐托盘组件包括送餐托盘支撑架,所述送餐托盘支撑架上设置有多组托盘,多组托盘之间间隔设置,所述托盘上设置有侧挡板,所述侧挡板用于防止菜品从所述托盘中滑落。
8.本实用新型作进一步改进,送餐移动平台包括上层控制机构和下层控制机构,所述上层控制机构与所述下层控制机构电性连接,所述上层控制机构与下层控制机构通过支撑柱连接,上层控制机构包括上层盖板、上层侧板和上层底板,上层侧板通过上层底板与上层盖板上的上层固定孔位配合安装组合成上层壳体,激光雷达组包括两组激光雷达,两组激光雷达均设置在上层壳体内,两组激光雷达之间的夹角为180
°
,上层底板上设置有与激光雷达配合的激光雷达孔,激光雷达凸出激光雷达孔设置,并且设置在上层控制机构和下层控制机构之间。
9.本实用新型作进一步改进,送餐托盘组件还包括交互显示模组和模组角度调节组件,交互显示模组通过模组角度调节组件设置在托盘支撑架上,交互显示模组与送餐移动平台电性连接,交互显示模组包括触摸显示器、麦克风组件和人脸识别相机。
10.本实用新型作进一步改进,还包括控制盒,控制盒设置在上层盖板上表面,控制盒
与上层控制机构电性连接,上层盖板上设置有与控制盒配合的走线通孔,控制盒上设置有上层控制主板、电源开关、usb接口、wifi天线、急停开关和手动充电口。
11.本实用新型作进一步改进,下层控制机构包括下层盖板、下层侧板和下层底板,下层侧板通过下层底板与下层盖板上的下层固定孔位配合安装组合成下层壳体,下层侧板内表面设置有安装平台,安装平台上设置有下层控制主板、路由器和音频功放板。
12.本实用新型作进一步改进,模组角度调节组件包括角度调节支撑座和角度活动组件,角度活动组件与交互显示模组固定连接,角度活动组件两端与角度调节支撑座连接,并且角度活动组件与角度调节支撑座连接处设置有橡胶层,橡胶层用于增加角度活动组件与角度调节支撑座之间的摩擦力,防止角度活动组件与角度调节支撑座之间滑动。
13.本实用新型作进一步改进,还包括温湿度传感器和可燃气体检测传感器,温湿度传感器和可燃气体检测传感器均固定设置在安装平台上,下层侧板上设置有与温湿度传感器和可燃气体检测传感器配合的传感器通孔。
14.本实用新型作进一步改进,还包括地标识别相机,地标识别相机固定设置在安装平台下表面,下层侧板上设置有与地标识别相机配合的地标识别通孔,下层底板上设置有自主充电口,地标识别相机使得进一步提高移动平台的运动精度。
15.与现有技术相比,本实用新型的有益效果是:采用其机构,能够有效的解决现有技术中送餐服务机器人在面对复杂的场景时,容易出现深度相机无法识别的物体,导致送餐过程容易出现碰撞和送餐位置不准确的问题,通过使用该产品结构,深度相机、激光雷达组和超声波传感器之间配合,能够有效的提高识别准确率,提高了用户的使用体验。
附图说明
16.为了更清楚地说明本技术或现有技术中的方案,下面将对实施例或现有技术描述中所需要使用的附图作一个简单介绍,显而易见地,下面描述中的附图是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
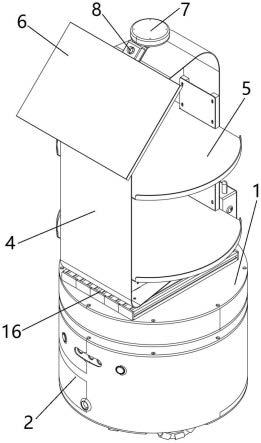
17.图1为本实用新型整体结构示意图;
18.图2为本实用新型另一视角结构示意图;
19.图3为送餐移动平台结构示意图;
20.图4为送餐移动平台另一视角结构示意图。
21.图5为送餐移动平台分解结构示意图。
22.图6为平台驱动装置部分结构示意图。
具体实施方式
23.除非另有定义,本文所使用的所有的技术和科学术语与属于本技术技术领域的技术人员通常理解的含义相同;本文中在申请的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本技术;本技术的说明书和权利要求书及上述附图说明中的术语“包括”和“具有”以及它们的任何变形,意图在于覆盖不排他的包含。本技术的说明书和权利要求书或上述附图中的术语“第一”、“第二”等是用于区别不同对象,而不是用于描述特定顺序。
24.在本文中提及“实施例”意味着,结合实施例描述的特定特征、结构或特性可以包含在本技术的至少一个实施例中。在说明书中的各个位置出现该短语并不一定均是指相同的实施例,也不是与其它实施例互斥的独立的或备选的实施例。本领域技术人员显式地和隐式地理解的是,本文所描述的实施例可以与其它实施例相结合。
25.为了使本技术领域的人员更好地理解本技术方案,下面将结合附图,对本技术实施例中的技术方案进行清楚、完整地描述。
26.如图1-6所示,本实用新型一种送餐服务机器人,包括送餐托盘组件和送餐移动平台。
27.送餐移动平台包括上层控制机构1和下层控制机构2,上层控制机构1与下层控制机构 2电性连接,上层控制机构1与下层控制机构2通过支撑柱3连接。
28.支撑柱3的数量为四组,四组支撑柱3之间的夹角为90
°
,通过四组支撑柱3的设置使得上层控制机构1与下层控制机构2之间支撑得更加稳定,不易出现移动平台运动过程中上层控制机构1与下层控制机构2之间发生晃动。
29.下层控制机构2包括下层盖板21、下层侧板22和下层底板23,下层侧板22通过下层底板23与下层盖板21上的下层固定孔位211配合安装组成下层壳体,下层侧板22内表面设置有安装平台221,安装平台221上设置有下层控制主板32、路由器、音频功放板和深度相机24,下层侧板22上设置有与深度相机24配合的深度相机通孔222,深度相机通孔 222用于配合深度相机24进行识别照射。
30.下层控制机构还包括平台驱动装置和电池,平台驱动装置和电池均固定设置在下层底板23上表面上。
31.平台驱动装置包括三组驱动轮组件26和三组减震装置27,驱动轮组件26包括全向轮 261和直流减速电机262,直流减速电机262的运动端与全向轮261通过固定法兰固定连接。
32.通过全向轮261的设置,能够全方向的移动,提高移动平台的灵活性,并且搭配深度相机24进行有效的避障导航,移动过程更为灵活,并且通过全向轮261的作用能够实现原地转向,提高转向的灵活性。
33.减震装置27包括减震支撑架271、减震连板272、第一减震件和第二减震件273,减震连板272与直流减速电机262的运动端固定连接,减震支撑架271固定设置在下层底板23 的上表面,第一减震件包括导向杆274和弹簧275,减震支撑架271上设置有与导向杆274 配合的导向孔,导向杆274与导向孔滑动连接,导向杆274一端固定设置在减震连板272 上,导向杆274另一端穿过导向孔设置,弹簧275套设在导向杆274上,并且弹簧275设置在减震支撑架271与减震连板272之间。
34.全向轮261遇到路面不平时,全向轮261和直线减速电机262的运动端会一起抖动,从而导致减震连板272也随着上下抖动,抖动过程中导向杆274会在导向孔内上下滑动,并且弹簧275也会出现被挤压状态和正常状态的切换,起到一定的减震效果,防止运输的菜品出现较大晃动。
35.第一减震件的数量为四组,通过四组第一减震件的设置能够进一步提高减震装置27的减震效果。
36.第二减震件273为液压缓冲器,液压缓冲器包括缓冲器本体和缓冲头,缓冲器本体
固定设置在减震连板272上,缓冲头的缓冲方向与第一减震件的减震方向相同。
37.通过第二减震件273的作用能够进一步提高减震装置27的减震效果,将较大幅度的抖动转换为缓慢且小幅度的抖动。
38.第二减震件273的数量为两组,两组第二减震件273设置在第一减震件两侧,通过两组第二减震件273的设置,使得减震效果更架均匀,再进一步提高减震装置27的减震效果。
39.三组驱动轮组件26独立排列并相互组件相差120
°
,通过三组驱动轮组件26的设置能够较灵活的移动。
40.该送餐服务机器人还包括温湿度传感器28和可燃气体检测传感器29,温湿度传感器28 和可燃气体检测传感器29均固定设置在安装平台221上,下层侧板22上设置有与温湿度传感器28和可燃气体检测传感器29配合的传感器通孔223,温湿度传感器28和可燃气体检测传感器29分别透过传感器通孔223对环境进行实时检测。
41.通过温湿度传感器28和可燃气体检测传感器29的设置,能够对周围环境的温度、湿度和是否存在可燃气体检测,涵盖了对服务机器人测试教学时用到的传感器。
42.该送餐服务机器人还包括地标识别相机30,地标识别相机30固定设置在安装平台221 下表面,下层侧板22上设置有与地标识别相机30配合的地标识别通孔,下层底板23上设置有自主充电口31,地标识别相机30透过地标识别通孔进行识别。
43.通过地标识别相机30的设置,激光slam导航定位到达目标点后,再通过地标识别相机 30识别目标地点贴的ar二维码精确二次定位,实现毫米级定位精度,精确送餐,地标识别相机30精准定位的同时还能用于与自主充电口31配合实现移动平台的自主充电。
44.该送餐服务机器人还包括两组超声波传感器32,两组超声波传感器32固定设置在安装平台221上,下层侧板22上设置有与超声波传感器32配合的超声波通孔225,超声波传感器32透过超声波通孔225进行感应。
45.通过超声波传感器32的设置,能够有效的识别对深度相机24和激光雷达14无法感知的玻璃障碍物的避障,提高移动平台整体的避障能力。
46.电池、直流减速电机262、路由器、音频功放板、深度相机24、温湿度传感器28、可燃气体检测传感器29、地标识别相机30和超声波传感器31均与下层控制主板32电性连接。
47.下层盖板21与下层底板23为圆形,下层侧板22为圆弧状,下层壳体为圆柱体,通过圆柱体形状的设置使得移动平台移动起来更加灵活,不容易碰到障碍物。
48.下层盖板21上设置有与上层控制机1构配合的下层过线通孔212。
49.上层控制机构1包括上层盖板11、上层侧板12和上层底板13,上层盖板11和上层底板13为圆形,上层侧板12为圆弧状,上层侧板12通过上层底板13与上层盖板11上的上层固定孔位111配合安装组成上层壳体,上层底板13上设置有上层过线通孔131。
50.上层壳体内设置有两组激光雷达14,两组激光雷达14之间的夹角为180
°
,上层底板 13上设置有与激光雷达14配合的激光雷达孔132,激光雷达14凸出激光雷达孔132设置,并且设置在上层控制机构1和下层控制机构2之间。
51.通过激光雷达14的设置能够实现360度的地图构建,相较于传统的单个激光雷达14,具有无死角照射的优势。
52.该送餐服务机器人还包括控制盒15,控制盒15设置在上层盖板11上表面,控制盒
15 与上层控制机构1电性连接,上层盖板11上设置有与控制盒15配合的走线通孔112,控制盒15上设置有上层控制主板、电源开关151、usb接口152、wifi天线153、急停开关154 和手动充电口155。
53.通过控制盒15的设置,能够有效的对移动平台进行控制,并且wifi天线153搭配路由器能够很好的实现移动平台远程交互的能力,通过usb接口152也能够移动平台的拓展性。
54.该送餐服务机器人还包括拓展安装面板16和拓展接口仓17,拓展安装面板16设置在上层盖板11上表面,拓展安装面板16用于方便安装其他拓展设备,拓展安装面板16和上层盖板11上设置有与拓展接口仓17配合的拓展接口仓孔113,拓展接口仓17固定设置在上层盖板11下表面,拓展接口仓17上设置有usb接口171、5v供电接口172、12v供电接口和i/o接口174。
55.通过拓展接口仓17的设置能够更方便用户进行更高级的拓展应用,通过usb接口171 和i/o接口174实现拓展应用与移动平台之间建立通讯,并通过供电接口给拓展应用进行供电,可拓展例如自动送餐服务机器人、自动喷雾消毒服务机器人和交互服务机器人等等。
56.激光雷达14、控制盒15和拓展接口仓17的线材经过上层过线通孔131和下层过线通孔212与下层控制主板32电性连接。
57.送餐托盘组件包括送餐托盘支撑架4,送餐托盘支撑架4上设置有两组托盘5,两组托盘5上下间隔设置,两组托盘5上设置均设置有侧挡板51,侧挡板51用于放置菜品从托盘 5中滑落。
58.送餐托盘组件还包括交互显示模组和模组角度调节组件,交互显示模组通过模组角度组件,交互显示模组通过模组角度调节组件设置在托盘支撑架4上。
59.托盘支撑架4上设置有供交互显示模组走线的交互走线通孔41,交互显示模组与拓展接口仓17电性连接,交互显示模组包括触摸显示器6、麦克风组件7和人脸识别相机8。
60.通过交互显示模组的设置,用户能够根据需求与送餐服务机器人进行交互,提高用户对送餐服务机器人的使用体验。
61.模组角度调节组件包括角度调节支撑座和角度活动组件,角度调节支撑座固定设置在送餐托盘支撑架4上,角度活动组件与交互显示模组固定连接,角度活动组件两端与角度调节支撑座连接,并且角度活动组件与角度调节支撑座连接处设置有橡胶层,橡胶层用于增加角度活动组件与角度调节支撑座之间的摩擦力,防止角度活动组件与角度调节支撑座之间滑动。
62.通过模组角度调节组件的设置,用户能够根据自己的需求对交互显示模组进行角度调节,提高用户的使用体验。
63.综上所述,本实用新型提供的一种送餐服务机器人,实现了三组驱动轮组件26控制的送餐服务机器人,具备两组超声波传感器31、1个温湿度传感器28、1个可燃气体检测传感器29、1个地标识别传感器30、两组激光雷达14和1个深度相机24,实现了slam建图、自主导航、路径规划及智能语音交互、web远程交互及自主充电等智能功能,同时提供电源及通讯接口,方便用户进行更高级的扩展应用,并且结合送餐托盘组件的设置,使得送餐服务机器人能够灵活精准的避障,提高送餐效率。
64.需要说明的是,本实施例中的尺寸不局限于上述提及的形状,可根据需要进行相应的调整,同样的上层底板13、上层盖板11、下层底板23与下层盖板21形状亦不局限圆形,也可以是方形或者其他形状,上层侧板12亦可以根据上层底板13与上层盖板12的形状做出适应性的改变,下层侧板22亦可以根据下层底板23与下层盖板21的形状做出适应性的改变。
65.上述实施例中第二减震件273为液压缓冲器,液压缓冲器包括缓冲器本体和缓冲头,缓冲器本体固定设置在减震连板上,缓冲头的缓冲方向与第一减震件的减震方向相同,很显然通过该结构进一步提高减震装置的设置结构件,第二减震件273还可以为阻尼器,同样能够实现上述方案的技术效果。
66.上述实施例中,送餐托盘组件包括送餐托盘支撑架4,送餐托盘支撑架4上设置有两组托盘5,两组托盘5上下间隔设置,两组托盘5上设置均设置有侧挡板51,侧挡板51用于放置菜品从托盘5中滑落,很显然通过该结构放置菜品的结构设置方式,还可以采用将托盘5的数量设置为三、四、五和六组等等,同样能够实现上述方案的技术效果。
67.以上所述之具体实施方式为本实用新型的较佳实施方式,并非以此限定本实用新型的具体实施范围,本实用新型的范围包括并不限于本具体实施方式,凡依照本实用新型所作的等效变化均在本实用新型的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1