一种多工位同步转动机构及翻转同步上料装置的制作方法
1.本实用新型涉及自动化设备技术领域,尤其涉及一种多工位同步转动机构及翻转同步上料装置。
背景技术:
2.产品和工件在加工、组装过程中往往需要多工位同时作业以提高效率,如工件和产品的清洁、外观检测、组装、加工等,这些工艺步骤常常需要将夹持的产品或零部件转动以对其多个角度进行相应操作,而为了配合上下游其它工序,这些产品或零部件需要同步转动。而多工位的同时作业通常受到操作空间的制约,如采用多个动力源驱动多个工位,一方面是结构体积会增大,不利于在狭小空间的布局,另一方面也难以做到完全同步,影响作业效果,也会造成动力源的浪费,现有的一些结构也难以满足狭小空间多工位同步运动的要求。
技术实现要素:
3.本实用新型的目的是克服上述现有技术的缺点,提供一种整体结构紧凑小巧、满足狭小空间需求的多工位同步转动机构,以及包含有该多工位同步转动机构的多工位翻转同步上料装置,用于实现一个驱动可以控制多个工位同步同时顺逆时针转动,可任意加减速和任意不同角度的转动,实现多工位同步高速检测等多种作业。
4.本实用新型是通过以下技术方案来实现的:
5.一种多工位同步转动机构,包括支撑板、伺服电机、第一转角器、第二转角器和旋转平台,所述伺服电机、第一转角器、两个第二转角器和旋转平台均安装在所述支撑板上,旋转平台可转动安装,所述第一转角器设置有两个处于同一平面上的输出轴,所述伺服电机的输出端与所述第一转角器的输入轴驱动连接,所述第二转角器为直角转角器,所述第一转角器的两个输出轴分别与两个所述第二转角器的输入轴驱动连接,两个所述第二转角器的输出轴分别与两个所述的旋转平台相连,实现一个伺服电机驱动两个旋转平台同步顺时针或逆时针转动的目的。
6.进一步地,还包括90度直角减速机,所述伺服电机平行于所述支撑板安装在支撑板上,伺服电机的输出端与所述90度直角减速机的输入端相连,90度直角减速机的输出端与所述第一转角器的输入轴驱动连接,伺服电机横置可以节省空间,使整体驱动结构小巧,实现在狭窄空间内的同步转动。
7.进一步地,所述第一转角器为一进二出直角转角器,第一转角器的两个输出轴位于同一条直线上且平行于所述支撑板的延伸方向。
8.进一步地,所述第一转角器的输出轴与所述第二转角器的输入轴通过联轴器相连。
9.进一步地,所述第二转角器为l型锥齿轮直角转角器,包括相互啮合的主动锥齿轮和从动锥齿轮,两个所述第二转角器上的主动锥齿轮相互对称安装,两个所述第二转角器
上的从动锥齿轮的转轴垂直于所述支撑板,伺服电机带动第一转角器的两个输出轴的转动方向相反,再经两个对称设置的第二转角器,第二转角器的输出轴的转动方向一致,从而使得两个旋转平台同步转动。
10.进一步地,所述旋转平台为中空旋转平台,其包括连接座和工件治具,所述连接座为中空结构,所述第二转角器中的从动锥齿轮亦为中空结构,连接座与第二转角器中的从动锥齿轮相连,连接座上的中空结构和从动锥齿轮上的中空结构形成可容许气管、电缆线等管线通过的通道,所述工件治具固定在所述连接座上,工件治具上设置有若干定位和固定工件的部件。中空旋转平台内部走线的方式可使旋转平台的360度自由旋转不受限,同时也有利于外观的整洁性。
11.进一步地,与所述第一转角器的两个输出轴相连的两个所述第二转角器分别再串联一个或多个第三转角器,所述第二转角器和第三转角器的结构相同,均为锥齿轮直角转角器,均包括相互啮合的主动锥齿轮和从动锥齿轮,第二转角器的主动锥齿轮的转轴穿过主动锥齿轮后其一端与第一转角器的输出轴相连,另一端与第三转角器的主动锥齿轮的转轴相连,每个所述第三转角器的从动锥齿轮上均安装有一个旋转平台;当串联有多个第三转角器时,各第三转角器的主动锥齿轮的转轴依次串联连接。
12.进一步地,所述第一转角器为一进二出直角转角器,第一转角器的两个输出轴位于同一条直线上;所述第一转角器的输出轴与所述第二转角器的输入轴通过联轴器相连,所述第二转角器的主动锥齿轮的转轴与所述第三转角器的主动锥齿轮的转轴通过联轴器相连。
13.进一步地,还包括防护罩,所述防护罩设置在所述支撑板的外围,用于将伺服电机、第一转角器和第二转角器罩设在内。
14.一种多工位翻转同步上料装置,包括上述多工位同步转动机构,还包括摆动机构,所述多工位同步转动机构上的支撑板安装在所述摆动机构上,摆动机构驱动支撑板及支撑板上的旋转平台摆动,摆动的轴线平行于支撑板的延伸方向,或两个旋转平台的中心连线,使得旋转平台在竖直平面上同步摆动的同时可沿各自的中心轴在水平平面上同步转动,方便旋转平台上的工件可在360度范围内转动,以进行不同面的检测或清洁。
15.本实用新型多工位同步转动机构设置伺服电机、第一转角器和第二转角器,通过第一转角器和第二转角器的换向功能,实现一个伺服电机依次带动多个工位同步转动的功能,以及实现整个驱动结构在狭小空间中的合理布局;通过对第一转角器、第二转角器的合理选型,以及设置直角减速机、第三转角器,可进一步根据需要灵活增加工位数量,进一步优化空间布局;通过设置中空旋转平台,可在设备中布局管道和电缆线,使得旋转平台可在360度范围内自由旋转而不受限,也可适应工件治具对各种产品或零部件不同夹持方式的需求,且有利于设备外部整洁美观。由该多工位同步转动机构组成的多工位同步上料装置,可使产品或零部件在同步摆动的同时同步转动,可对产品或零部件的各个角度进行各种操作,适用性广。
附图说明
16.图1为本实用新型实施例1的结构示意图。
17.图2为本实用新型实施例1的正面剖视图。
18.图3为本实用新型实施例1的驱动原理示意图。
19.图4为本实用新型实施例2的结构示意图。
20.图5为本实用新型实施例3的结构示意图。
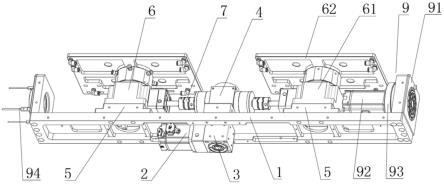
21.附图标记:1-支撑板;2-伺服电机;3-90度直角减速机;4-第一转角器;5-第二转角器;6-旋转平台;7-联轴器;8-第三转角器;9-摆动机构;10-多工位同步上料装置;51-第二转角器的主动锥齿轮;52-第二转角器的从动锥齿轮;61-连接座;62-工件治具;63-通道;64-中空结构;81-第三转角器的主动锥齿轮;82-第三转角器的从动锥齿轮;91-支撑架;92-翻转电机;93-翻转减速机;94-翻转回零和限位感应。
具体实施方式
22.实施例1
23.一种多工位同步转动机构,如图1、图2所示,包括支撑板1、伺服电机2、第一转角器4、第二转角器5和旋转平台6,所述伺服电机2、第一转角器4、两个第二转角器5和旋转平台6均安装在所述支撑板1上,旋转平台6可转动安装,所述第一转角器4设置有两个处于同一平面上的输出轴,所述伺服电机2的输出端与所述第一转角器4的输入轴驱动连接,所述第二转角器5为l型直角转角器,所述第一转角器4的两个输出轴分别与两个所述第二转角器5的输入轴驱动连接,两个所述第二转角器5的输出轴分别与两个所述的旋转平台6相连,实现一个伺服电机2驱动两个旋转平台6同步顺时针或逆时针转动的目的。
24.为了优化空间布局,本实施例的多工位同步转动机构还包括90度直角减速机3,所述伺服电机2平行于所述支撑板1安装在支撑板1上,伺服电机2的输出端与所述90度直角减速机3的输入端相连,90度直角减速机3的输出端与所述第一转角器4的输入轴驱动连接,伺服电机2横置可以节省空间,使整体驱动结构小巧,实现在狭窄空间内的同步转动。
25.本实施例中,如图3,所述第一转角器4为一进二出直角转角器,第一转角器4的两个输出轴位于同一条直线上,且平行于所述支撑板的延伸方向。所述第一转角器4的输出轴与所述第二转角器5的输入轴通过联轴器7相连。
26.本实施例中,所述第二转角器5为一进一出的l型锥齿轮直角转角器,包括相互啮合的主动锥齿轮51和从动锥齿轮52,两个所述第二转角器5上的主动锥齿轮51相互对称安装,两个所述第二转角器的从动锥齿轮52的转轴垂直于所述支撑板1,伺服电机2通过第一转角器4及两个对称设置的第二转角器5带动两个旋转平台6同步转动。具体如图3,伺服电机2带动第一转角器4的两个输出轴的转动方向相反,再经两个对称设置的第二转角器5,第二转角器5的输出轴的转动方向一致,从而使得两个旋转平台6同步转动。
27.作为其中一种实施方式,如图2、图5,所述旋转平台6为中空旋转平台6,其包括连接座61和工件治具62,所述连接座61为中空结构64,所述第二转角器5的从动锥齿轮52亦为中空结构64,连接座61与第二转角器5中的从动锥齿轮52相连,连接座61上的中空结构64和从动锥齿轮52上的中空结构64形成可容许气管、电缆线等管线通过的通道63,所述工件治具62固定在所述连接座61上,工件治具62上设置有若干定位和固定工件的部件,如吸盘、夹爪、定位凹槽等,吸盘需通过管道与气源相连,夹爪需连接电缆线以进行抓取控制。中空旋转平台内部走线的方式可使旋转平台的360度自由旋转不受限,同时也有利于外观的整洁性。
28.实施例2
29.一种多工位同步转动机构,其余与实施例1相同,区别在于,如图4,与所述第一转角器4的两个输出轴相连的两个所述第二转角器5分别再串联一个或多个第三转角器8,所述第二转角器5和第三转角器8的结构相同,均为锥齿轮直角转角器,均包括相互啮合的主动锥齿轮和从动锥齿轮,第二转角器的主动锥齿轮51的转轴穿过主动锥齿轮51后其一端与第一转角器4的输出轴相连,另一端与第三转角器的主动锥齿轮81的转轴相连,每个所述第三转角器的从动锥齿轮82上均安装有一个旋转平台6。所述第一转角器4为一进二出直角转角器,第一转角器4的两个输出轴位于同一条直线上;所述第一转角器4的输出轴与所述第二转角器5的输入轴通过联轴器7相连,所述第二转角器的主动锥齿轮51的转轴与所述第三转角器的主动锥齿轮81的转轴通过联轴器7相连。图4中为两个第二转角器5各串联一个第三转角器8的情况,可产生四个工位,当串联多个第三转角器8时,工位的数量相应增多。
30.当串联有多个第三转角器8时,各第三转角器的主动锥齿轮81的转轴依次串联连接。伺服电机2通过第一转角器4分别带动两个第二转角器5转动,两个第二转角器5通过串联的转轴分别带动一个或多个第三转角器8转动,从而实现一个伺服电机2带动多个旋转平台6同步转动,对应多个工位的同步工作。
31.为了提高设备密封性及外观整洁性,本实用新型的多工位同步转动机构还可包括防护罩,所述防护罩设置在所述支撑板1的外围,用于将伺服电机2、第一转角器4和第二转角器5罩设在内。
32.实施例3
33.一种多工位翻转同步上料装置10,包括上述实施例1和实施例2中的多工位同步转动机构,还包括摆动机构9,以包括实施例1的多工位同步转动机构为例,如图5,所述多工位同步转动机构上的支撑板1安装在所述摆动机构9上,摆动机构9驱动支撑板1及支撑板1上的旋转平台6摆动,摆动的轴线平行于支撑板1的延伸方向,或平行于若干旋转平台6的中心连线,使得若干旋转平台6在竖直平面上同步摆动的同时可沿各自的中心轴在水平平面上同步转动,方便旋转平台6上的工件可在360度范围内转动,以进行不同面的检测或清洁。摆动机构9可包括支撑架91、翻转电机92、翻转减速机93、翻转回零和限位感应94,支撑板1可转动安装在支撑架91上,翻转电机92和翻转减速机93与支撑板1驱动连接,翻转电机92驱动支撑板1相对支撑架91在竖直平面上转动,翻转回零和限位感应94安装在支撑架91上。本实用新型的多工位同步上料装置10可用于对工件或产品的视觉检测、表面清洁等领域中。
34.上列详细说明是针对本实用新型可行实施例的具体说明,该实施例并非用以限制本实用新型的专利范围,凡未脱离本实用新型所为的等效实施或变更,均应包含于本案的专利范围中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1