一种煤矿救灾机器人
1.本实用新型涉及煤矿救灾技术领域,尤其是涉及一种煤矿救灾机器人。
背景技术:
2.煤矿巷道位于地底,一旦发生瓦斯事故、顶板事故,将会对人员的生命安全造成巨大的威胁,且救援困难。
3.机器人救援相较于传统的救援方式具有多重优势。救援机器人可以携带多种传感器,实现事故现场地形、声音、气体、温度等环境信息的采集,为救援人员提供一线数据的同时,也能帮助救援人员锁定被困者的位置,并且为被困者提供基本的救援物资(如食物、水)。救援机器人可以辅助或替代救援人员到达现场,避免在二次灾害发生时,产生不必要的伤亡,降低救援风险。救援机器人的体积较小,行动迅速,可以在狭小的空间中快速移动,能够提高探测效率。
4.现有的救援机器人(如申请号为cn202210238126.7的中国发明专利)通常通过多自由度机械臂伺服抓取系统将机器上的物质从车上搬运到地下,多自由度机械臂伺服抓取系统成本较高,增加了救援机器人的生产成本。
技术实现要素:
5.有鉴于此,有必要提供一种煤矿救灾机器人,用以提供一种成本更为低廉的救援机器人卸料机构以代替多自由度机械臂伺服抓取系统。
6.为了实现上述目的,本实用新型提供了一种煤矿救灾机器人,包括机壳、行走机构及卸料机构;
7.所述行走机构设置于所述机壳上、并用于驱动所述机壳移动;
8.所述卸料机构包括转盘、方位调节件、支撑板、支柱、距离调节件、倾角调节件及吊篮,所述转盘转动设置于所述机壳上,所述方位调节件与所述转盘连接、并用于驱动所述转盘转动,所述支撑板固定于所述转盘,所述支柱固定于所述支撑板上,所述距离调节件的固定端铰接于所述支柱上,所述倾角调节件与所述距离调节件连接、并用于调节所述距离调节件的倾角,所述吊篮经由一吊绳挂设于所述距离调节件的活动端,所述吊篮内用于放置救援物资。
9.在一些实施例中,所述行走机构包括主动轮、从动轮、转动驱动件及履带,所述主动轮及所述从动轮均转动设置于所述机壳上,所述转动驱动件与所述主动轮连接、并用于驱动所述主动轮转动,所述履带闭合设置,所述履带的一端绕设于所述主动轮上,所述履带的另一端绕设于所述从动轮上。
10.在一些实施例中,所述距离调节件为第一伸缩气缸,所述第一伸缩气缸的缸体铰接于所述支柱上,所述倾角调节件与所述第一伸缩气缸的缸体连接、并用于调节所述第一伸缩气缸的缸体的倾角,所述吊篮经由所述吊绳挂设于所述第一伸缩气缸的输出轴上。
11.在一些实施例中,所述第一伸缩气缸的输出轴上形成有凸出部。
12.在一些实施例中,所述倾角调节件包括第二伸缩气缸,所述第二伸缩气缸的缸体铰接于所述支柱上,所述第二伸缩气缸的输出轴与所述第一伸缩气缸的缸体铰接。
13.在一些实施例中,所述支柱上固定有第一连接块,所述第二伸缩气缸的缸体铰接于所述第一连接块上。
14.在一些实施例中,所述第一伸缩气缸的缸体上固定有第二连接块,所述第二伸缩气缸的输出轴与所述第二连接块铰接。
15.在一些实施例中,所述机壳上固定有摄像件。
16.在一些实施例中,所述机壳上固定有录音件及扬声器。
17.在一些实施例中,所述机壳上固定有瓦斯浓度检测件。
18.与现有技术相比,本实用新型提出的技术方案的有益效果是:在使用时,将装有救援物资的吊篮通过吊绳挂在距离调节件的活动端,再将煤矿救灾机器人放入目标巷道内,通过行走机构驱动机壳沿着巷道移动,当需要将救援物质放入巷道内的地面上时,首先通过距离调节件使距离调节件的活动端伸长,再通过方位调节件调节转盘的方位,从而使吊篮转动至指定位置的上方,再通过倾角调节件使距离调节件的活动端向前倾斜,从而使挂在距离调节件的活动端上的吊绳滑落,从而使装有救援物资的吊篮掉落在地面。由于本实用新型中,通过距离调节件及倾角调节件的配合,实现了将吊篮从机壳转运到地面,通过转盘及方位调节件的配合,可调节吊篮的掉落位置,从而可替代多自由度机械臂伺服抓取系统,大大降低了设备生产成本。
附图说明
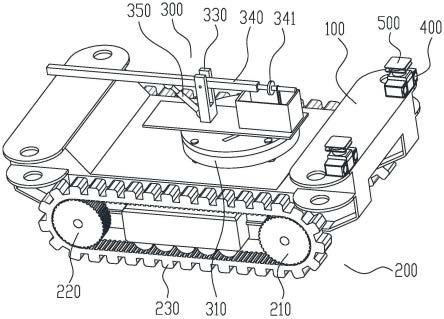
19.图1是本实用新型提供的煤矿救灾机器人的一实施例的立体结构示意图;
20.图2是图1的俯视图;
21.图3是图2中剖面a-a的剖视图;
22.图4是图3中的卸料机构的结构示意图;
23.图5是图4中的卸料机构在距离调节件的输出轴上倾时的结构示意图;
24.图6是图5中的卸料机构在距离调节件的输出轴伸出时的结构示意图;
25.图7是图6中的卸料机构在距离调节件的输出轴下倾时的结构示意图;
26.图中:100-机壳、200-行走机构、210-主动轮、220-从动轮、230-履带、300-卸料机构、310-转盘、320-支撑板、330-支柱、340-距离调节件、341-凸出部、350-倾角调节件、351-第二伸缩气缸、352-第一连接块、353-第二连接块、360-吊篮、361-吊绳、400-摄像件、500-瓦斯浓度检测件。
具体实施方式
27.下面结合附图来具体描述本实用新型的优选实施例,其中,附图构成本技术一部分,并与本实用新型的实施例一起用于阐释本实用新型的原理,并非用于限定本实用新型的范围。
28.请参照图1-图4,本实用新型提供了一种煤矿救灾机器人,包括机壳100、行走机构200及卸料机构300。
29.所述行走机构200设置于所述机壳100上、并用于驱动所述机壳100移动。
30.所述卸料机构300包括转盘310、方位调节件(未示出)、支撑板320、支柱330、距离调节件340、倾角调节件350及吊篮360,所述转盘310的固定端固定于所述机壳100上,所述方位调节件与所述转盘310连接、并用于驱动所述转盘310转动,本实施例中,方位调节件为一电机,该电机可驱动转盘310转动,所述支撑板320固定于所述转盘310,所述支柱330固定于所述支撑板320上,所述距离调节件340的固定端铰接于所述支柱330上,所述倾角调节件350与所述距离调节件340连接、并用于调节所述距离调节件340的倾角,所述吊篮360经由一吊绳361挂设于所述距离调节件340的活动端,所述吊篮360内用于放置救援物资。
31.在使用时,将装有救援物资的吊篮360通过吊绳361挂在距离调节件340的活动端(如图1-图4所示),再将煤矿救灾机器人放入目标巷道内,通过行走机构200驱动机壳100沿着巷道移动,当需要将救援物质放入巷道内的地面上时,首先通过距离调节件340使距离调节件340的活动端伸长(如图5和图6所示),再通过方位调节件调节转盘310的方位,从而使吊篮360转动至指定位置的上方,再通过倾角调节件350使距离调节件340的活动端向前倾斜(如图7所示),从而使挂在距离调节件340的活动端上的吊绳361滑落,从而使装有救援物资的吊篮360掉落在地面。由于本实用新型中,通过距离调节件340及倾角调节件350的配合,实现了将吊篮360从机壳100转运到地面,通过转盘310及方位调节件的配合,可调节吊篮360的掉落位置,从而可替代多自由度机械臂伺服抓取系统,大大降低了设备生产成本。
32.为了具体实现行走机构200的功能,请参照图1-图3,在一优选的实施例中,所述行走机构200包括主动轮210、从动轮220、转动驱动件及履带230,所述主动轮210及所述从动轮220均转动设置于所述机壳100上,所述转动驱动件与所述主动轮210连接、并用于驱动所述主动轮210转动,所述履带230闭合设置,所述履带230的一端绕设于所述主动轮210上,所述履带230的另一端绕设于所述从动轮220上,在使用时,转动驱动件驱动所述主动轮210转动,主动轮210带动履带230转动,从而带动机壳100移动,应当理解,主动轮210、从动轮220、转动驱动件及履带230设置有相互独立的两组,分别布置于机壳100的两侧。
33.为了具体实现距离调节件340的功能,请参照图3和图4,在一优选的实施例中,所述距离调节件340为第一伸缩气缸,所述第一伸缩气缸的缸体铰接于所述支柱330上,所述倾角调节件350与所述第一伸缩气缸的缸体连接、并用于调节所述第一伸缩气缸的缸体的倾角,所述吊篮360经由所述吊绳361挂设于所述第一伸缩气缸的输出轴上。
34.为了防止当第一伸缩气缸的输出轴上倾时吊绳361向第一伸缩气缸的缸体方向滑动,请参照图3和图4,在一优选的实施例中,所述第一伸缩气缸的输出轴上形成有凸出部341,当第一伸缩气缸的输出轴上倾时,由于凸出部341的阻挡,吊绳361不会向第一伸缩气缸的缸体方向滑动。
35.为了具体实现倾角调节件350的功能,请参照图3和图4,在一优选的实施例中,所述倾角调节件350包括第二伸缩气缸351,所述第二伸缩气缸351的缸体铰接于所述支柱330上,所述第二伸缩气缸351的输出轴与所述第一伸缩气缸的缸体铰接,在使用时,通过调节第二伸缩气缸351的输出轴的伸出长度,从而可调节第一伸缩气缸的缸体的倾角,从而实现倾角调节件350的功能。
36.为了具体实现第二伸缩气缸351的缸体与支柱330的铰接,请参照图3和图4,在一优选的实施例中,所述支柱330上固定有第一连接块352,所述第二伸缩气缸351的缸体铰接于所述第一连接块352上。
37.为了具体实现第二伸缩气缸351的输出轴与第一伸缩气缸的缸体的铰接,请参照图3和图4,在一优选的实施例中,所述第一伸缩气缸的缸体上固定有第二连接块353,所述第二伸缩气缸351的输出轴与所述第二连接块353铰接。
38.为了方便救援人员指挥行走机构200移动,请参照图1,在一优选的实施例中,所述机壳100上固定有摄像件400,摄像件400自带补光机构,摄像件400将巷道内的图像传输至地面,地面救援人员根据这些图像指挥行走机构200移动。为了方便救援人员与被困人员交流,所述机壳100上固定有录音件及扬声器(未示出)。
39.为了方便检测巷道内的瓦斯浓度,请参照图1,在一优选的实施例中,所述机壳100上固定有瓦斯浓度检测件500,从而便于救援人员确定救援方案。
40.为了更好地理解本实用新型,以下结合图1-图7来对本实用新型提供的煤矿救灾机器人的工作过程进行详细说明:在使用时,将装有救援物资的吊篮360通过吊绳361挂在距离调节件340的活动端(如图1-图4所示),再将煤矿救灾机器人放入目标巷道内,通过行走机构200驱动机壳100沿着巷道移动,当需要将救援物质放入巷道内的地面上时,首先通过距离调节件340使距离调节件340的活动端伸长(如图5和图6所示),再通过方位调节件调节转盘310的方位,从而使吊篮360转动至指定位置的上方,再通过倾角调节件350使距离调节件340的活动端向前倾斜(如图7所示),从而使挂在距离调节件340的活动端上的吊绳361滑落,从而使装有救援物资的吊篮360掉落在地面。由于本实用新型中,通过距离调节件340及倾角调节件350的配合,实现了将吊篮360从机壳100转运到地面,通过转盘310及方位调节件的配合,可调节吊篮360的掉落位置,从而可替代多自由度机械臂伺服抓取系统,大大降低了设备生产成本。
41.以上所述仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1