一种安防巡检机器人的制作方法
本技术涉及巡检机器人,具体是一种安防巡检机器人。
背景技术:
1、安防工程就是实现采用现代科技手段实现安全防护的过程,安防产品则是服务于安防工程的设备,常通过安防巡检机器人进行安防作业;
2、现有的安防巡检机器人,在使用时,一旦倾倒则无法自动起身,导致不能够继续巡检。
技术实现思路
1、本实用新型的目的在于提供一种安防巡检机器人,以解决现有的安防巡检机器人,在使用时,一旦倾倒则无法自动起身,导致不能够继续巡检的问题。
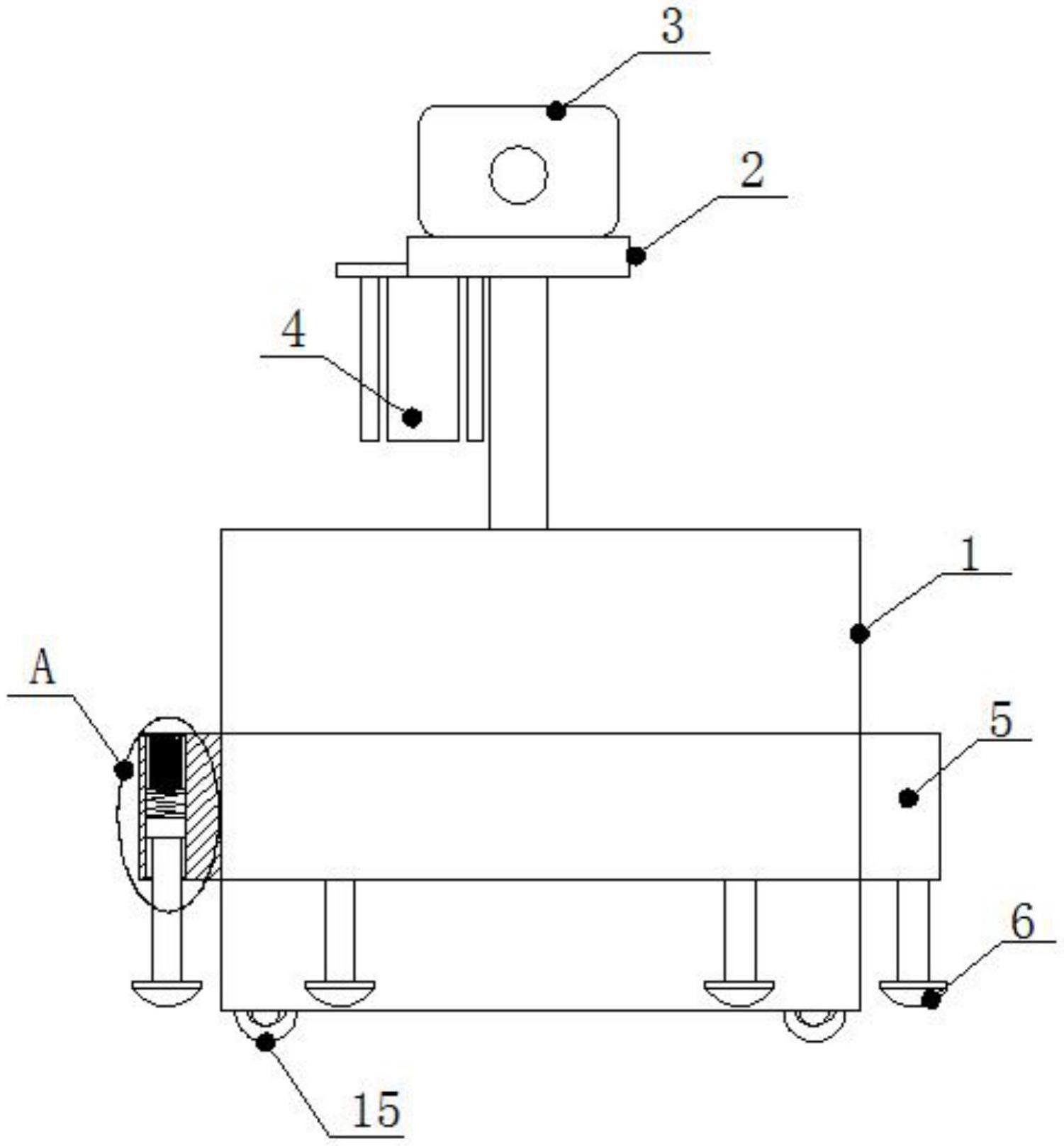
2、为实现上述目的,本实用新型提供如下技术方案:一种安防巡检机器人,包括机身,所述机身的上方安装有支架,所述支架下方一侧固接有吊绳,所述吊绳的下端固接有重力球,所述支架的下方与重力球的四个方位对应的位置均安装有压力检测板,所述机身的四个侧面靠近下方的位置均固接有凸块,每个所述凸块的内部上方均安装有电磁铁,四个所述电磁铁并联,所述凸块的内部下方滑动连接有磁铁,所述磁铁与电磁铁之间固接有压缩弹簧,所述磁铁的下端固接有能够穿过凸块下端面的防倾支撑杆。
3、优选的,所述防倾支撑杆的下端固接有底座。
4、优选的,所述压力检测板包括固接在支架下表面四侧的固定板、位于固定板内侧的受力板以及安装在固定板与受力板之间的压力传感器。
5、优选的,所述机身的内部安装有电源,所述电源给电磁铁供电,每个所述电磁铁与电源之间均设有电源开关。
6、优选的,还包括控制器,所述压力传感器的输出端与控制器电连接,且控制器的输出端与对应的电源开关的输入端电连接,所述电源开关的输出端与对应的电磁铁电连接。
7、优选的,所述机身的下方安装有行走轮。
8、与现有技术相比,本实用新型的有益效果是:
9、1、本实用新型设置了重力球和压力检测板,当机身倾斜时,重力球压在倾斜侧,可使得压力检测板能够快速检测出倾斜的方位;
10、2、本实用新型设置了依靠电磁铁吸住的防倾支撑杆,当压力检测板检测到倾斜方位后,电磁铁断电,压缩弹簧可将防倾支撑杆向下压,使得防倾支撑杆支撑起倾斜侧,避免机身产生倾倒。
技术特征:
1.一种安防巡检机器人,包括机身(1),其特征在于:所述机身(1)的上方安装有支架(2),所述支架(2)下方一侧固接有吊绳(7),所述吊绳(7)的下端固接有重力球(8),所述支架(2)的下方与重力球(8)的四个方位对应的位置均安装有压力检测板(4),所述机身(1)的四个侧面靠近下方的位置均固接有凸块(5),每个所述凸块(5)的内部上方均安装有电磁铁(12),四个所述电磁铁(12)并联,所述凸块(5)的内部下方滑动连接有磁铁(10),所述磁铁(10)与电磁铁(12)之间固接有压缩弹簧(11),所述磁铁(10)的下端固接有能够穿过凸块(5)下端面的防倾支撑杆(9)。
2.根据权利要求1所述的一种安防巡检机器人,其特征在于:所述防倾支撑杆(9)的下端固接有底座(6)。
3.根据权利要求1所述的一种安防巡检机器人,其特征在于:所述压力检测板(4)包括固接在支架(2)下表面四侧的固定板(41)、位于固定板(41)内侧的受力板(42)以及安装在固定板(41)与受力板(42)之间的压力传感器(43)。
4.根据权利要求3所述的一种安防巡检机器人,其特征在于:所述机身(1)的内部安装有电源(13),所述电源(13)给电磁铁(12)供电,每个所述电磁铁(12)与电源(13)之间均设有电源开关(16)。
5.根据权利要求4所述的一种安防巡检机器人,其特征在于:还包括控制器(14),所述压力传感器(43)的输出端与控制器(14)电连接,且控制器(14)的输出端与对应的电源开关(16)的输入端电连接,所述电源开关(16)的输出端与对应的电磁铁(12)电连接。
6.根据权利要求1所述的一种安防巡检机器人,其特征在于:所述机身(1)的下方安装有行走轮(15)。
技术总结
本技术公开了一种安防巡检机器人,包括机身,所述机身的上方安装有支架,所述支架下方一侧固接有吊绳,所述吊绳的下端固接有重力球,所述支架的下方与重力球的四个方位对应的位置均安装有压力检测板,所述机身的四个侧面靠近下方的位置均固接有凸块,每个所述凸块的内部上方均安装有电磁铁,所述凸块的内部下方滑动连接有磁铁,所述磁铁与电磁铁之间固接有压缩弹簧,所述磁铁的下端固接有能够穿过凸块下端面的防倾支撑杆,本技术设置了依靠电磁铁吸住的防倾支撑杆,当压力检测板检测到倾斜方位后,电磁铁断电,压缩弹簧可将防倾支撑杆向下压,使得防倾支撑杆支撑起倾斜侧,避免机身产生倾倒。
技术研发人员:周现生,徐凯
受保护的技术使用者:上海辛骋电子科技有限公司
技术研发日:20221228
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!