一种基于外骨骼的辅助搬运方法及设备与流程
本发明属于外骨骼助力,具体涉及一种基于外骨骼的辅助搬运方法及设备。
背景技术:
1、外骨骼是一种能够提供对生物柔软内部器官进行构型,建筑和保护的坚硬的外部结构,科学家们在医疗、工业生产等方面对外骨骼的研究进行了广阔的拓展,从此,外骨骼机械设备常被联系到“超级装甲”或用于扩充或增强一个人的生理机能的系统,此类设备可以帮助一个人举起或携带较重的负荷、跑的更快、跳的更高。
2、外骨骼设备的研发在为操作者提供保护、身体支撑等功能基础上,还通过融入了传感、控制、信息、通信等技术,为穿戴者提供额外的动力或能力,从而达到增强人体机能的效果,使外骨骼机械设备能够在操作者的控制下完成一定的功能和任务,实现力量的增强和感官的延伸。
3、此外,外骨骼机械设备也可作为帮助残障人士行走以及工人负荷执行制造、搬运任务的辅助工具,工人在抬起或搬运较重的物体一般依赖自身体力进行抬起或搬运,较为费时费力,且容易引发意外,因此,亟需设计一套通过外骨骼技术助力工人搬运物体的方案。
技术实现思路
1、为了克服上述现有技术的缺陷,本发明提出了一种基于外骨骼的辅助搬运方法,所述方法包括:
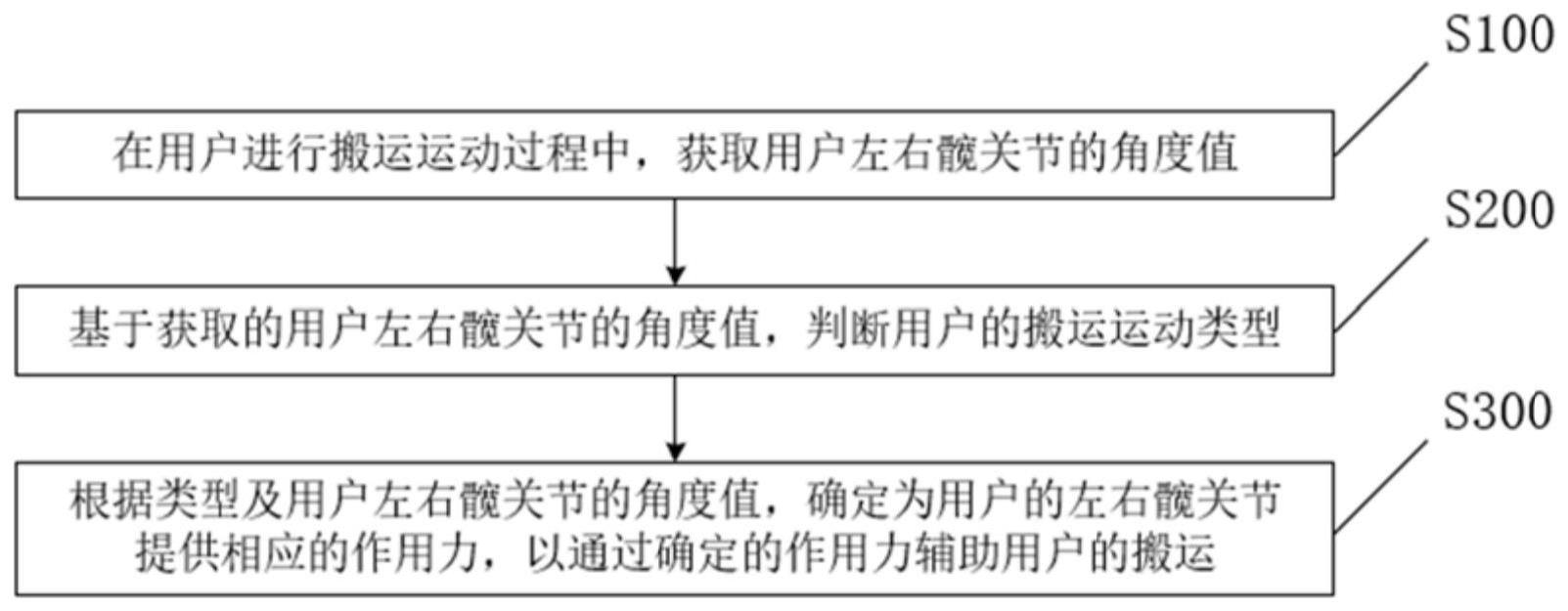
2、在用户进行搬运运动过程中,获取所述用户左右髋关节的角度值;
3、基于所述用户左右髋关节的角度值,判断所述用户的搬运运动的类型;所述搬运运动的类型包括静态搬运类型和动态搬运类型;
4、根据所述类型及所述用户左右髋关节的角度值,确定为所述用户的左右髋关节提供相应的作用力,以通过确定的所述作用力辅助所述用户的搬运。
5、具体地,所述“基于所述用户左右髋关节的角度值,判断所述用户的搬运运动的类型”包括:
6、若获取到所述用户的左右髋关节角度值变化方式相反,则判断所述用户的搬运运动类型为动态搬运类型;
7、若获取到所述用户的左右髋关节角度值变化方式相同,则判断所述用户的搬运运动类型为静态搬运类型。
8、具体地,所述用户左右髋关节的角度值附带有时间标签,若所述用户的搬运运动类型为静态搬运类型,且获取到所述用户左右髋关节的角度值均为由小至大变化时,所述“根据所述类型及所述用户左右髋关节的角度值,确定为所述用户的左右髋关节提供相应的作用力,以通过确定的所述作用力辅助所述用户的搬运”包括:
9、基于所述用户左右髋关节的角度值及所述时间标签,计算所述用户左右髋关节的角速度;
10、若所述用户的左右髋关节均保持零的角速度达到第一预设时长,为所述用户的左右髋关节提供第一作用力,以辅助所述用户左右髋关节的角度值由大至小变化,直至所述用户的左右髋关节的角度值达到第一预设角度;所述第一作用力基于所述用户左右髋关节的角度值确定。
11、进一步地,所述方法还包括:
12、在所述用户进行搬运运动的过程中持续为所述用户提供第二作用力;所述第二作用力用于防止所述用户左右髋关节的角速度超出预设的速度值。
13、优选地,所述方法还包括:
14、在所述用户左右髋关节的角度值均由小至大变化的过程中,若所述用户左右髋关节的角度值均已达到第二预设角度,为所述用户提供第三作用力以防止所述用户左右髋关节的角度值继续变小。
15、具体地,若所述用户的搬运运动类型为动态搬运类型,所述“根据所述类型及所述用户左右髋关节的角度值,确定为所述用户的左右髋关节提供相应的作用力,以通过确定的所述作用力辅助所述用户的搬运”包括:
16、当某一侧髋关节的角度值的变化趋势从由大变小转为由小变大时,将第四作用力作用于该侧髋关节,直至该侧髋关节的角度值变化趋势重新转为由大变小;所述第四作用力用于为单侧髋关节提供向下的压力。
17、进一步地,所述第四作用力是基于所述用户左右髋关节的角度值及通过角度值得到的角速度确定得到的,确定所述第四作用力的方法包括:
18、监测搬运运动类型为动态搬运类型的搬运过程中所述用户的左右髋关节活动,形成对应所述用户外骨骼步态的左右髋关节活动的拟合波形图;
19、在所述拟合波形图中选取左右髋关节中的其中一个髋关节达到第一特定角度、第二特定角度的时间点,标定所述髋关节达到所述第一特定角度的时间点为第一时间点,所述髋关节达到所述第二特定角度的时间点为第二时间点;所述第一时间点的时间顺序在所述第二时间点之前,所述第一时间点与所述第二时间点的时间差不超过一个左右髋关节活动的周期,所述第一时间点及所述第二时间点仅在所述拟合波形图中左右髋关节角度值由小变大的波形中标定;
20、基于所述第一特定角度、所述第二特定角度及所述第一时间点与所述第二时间点的时间差,确定为所述髋关节提供的所述第四作用力,以当左右髋关节中的另一髋关节下次达到所述第一特定角度时,将第所述四作用力作用于所述另一髋关节,直到所述另一髋关节达到所述第二特定角度。
21、具体地,所述特定角度包括:
22、所述左侧髋关节或所述右侧髋关节达到最大角度值的角度;
23、所述左侧髋关节或所述右侧髋关节达到最小角度值的角度;
24、所述左侧髋关节和所述右侧髋关节两者在同一时刻达到相同角度值的角度。
25、优选地,所述用户左右髋关节的角度值由零位作为基准确定,标定所述零位的方法包括:
26、若所述用户的搬运运动类型为动态搬运类型,标定所述左侧髋关节和所述右侧髋关节两者在同一时刻达到相同角度值的角度的时间点为所述零位;
27、若所述用户还未开始进行搬运运动,使所述用户保持站立状态以标定所述零位。
28、本发明还提出了一种基于外骨骼的辅助搬运设备,所述辅助搬运设备用于穿戴于用户的左右髋关节处,以实现如前文所述的基于外骨骼的辅助搬运方法。
29、本发明至少具有以下有益效果:
30、本发明提出的方法基于外骨骼技术,通过分解使用者在搬运过程中的不同阶段的状态,并分别确定适合当前状态的作用力辅助使用者进行搬运,节省了需要进行搬运工作的工作者在搬运物体过程中耗费的体力,提高了搬运工作的效率;
31、进一步地,本发明提出的方法可在动态搬运过程中通过用户其中一侧的在先步态校准另一侧的步态,并由此形成闭环校准,保证了用户在动态搬运过程中左右步态较为接近,进而使用户能够平稳地搬运物体,大大提升了搬运过程中的安全性。
32、以此,本发明提供了一种基于外骨骼的辅助搬运方法及设备,本发明提出的方法为需要执行负荷搬运工作的工作者提供了良好的辅助,能够节省使用者搬运物体过程中花费的体力,提高了搬运工作的效率,同时通过增加平衡性令使用者可平稳搬运物体,有效地保障了使用者在搬运过程的人身安全。
技术特征:
1.一种基于外骨骼的辅助搬运方法,其特征在于,所述方法包括:
2.根据权利要求1所述的基于外骨骼的辅助搬运方法,其特征在于,所述“基于所述用户左右髋关节的角度值,判断所述用户的搬运运动的类型”包括:
3.根据权利要求2所述的基于外骨骼的辅助搬运方法,其特征在于,所述用户左右髋关节的角度值附带有时间标签,若所述用户的搬运运动类型为静态搬运类型,且获取到所述用户左右髋关节的角度值均为由小至大变化时,所述“根据所述类型及所述用户左右髋关节的角度值,确定为所述用户的左右髋关节提供相应的作用力,以通过确定的所述作用力辅助所述用户的搬运”包括:
4.根据权利要求1所述的基于外骨骼的辅助搬运方法,其特征在于,所述方法还包括:
5.根据权利要求1-4任一项所述的基于外骨骼的辅助搬运方法,其特征在于,所述方法还包括:
6.根据权利要求1或2所述的基于外骨骼的辅助搬运方法,其特征在于,若所述用户的搬运运动类型为动态搬运类型,所述“根据所述类型及所述用户左右髋关节的角度值,确定为所述用户的左右髋关节提供相应的作用力,以通过确定的所述作用力辅助所述用户的搬运”包括:
7.根据权利要求6所述的基于外骨骼的辅助搬运方法,其特征在于,所述第四作用力是基于所述用户左右髋关节的角度值及通过角度值得到的角速度确定得到的,确定所述第四作用力的方法包括:
8.根据权利要求7所述的基于外骨骼的辅助搬运方法,其特征在于,所述特定角度包括:
9.根据权利要求1所述的基于外骨骼的辅助搬运方法,其特征在于,所述用户左右髋关节的角度值由零位作为基准确定,标定所述零位的方法包括:
10.一种基于外骨骼的辅助搬运设备,其特征在于,所述辅助搬运设备用于穿戴于用户的左右髋关节处,以实现如权利要求1-9任一项所述的基于外骨骼的辅助搬运方法。
技术总结
本发明提供了一种基于外骨骼的辅助搬运方法及设备,方法包括在用户进行搬运运动过程中获取用户左右髋关节的角度值,基于用户左右髋关节的角度值,判断用户的搬运运动的类型;搬运运动的类型包括静态搬运类型和动态搬运类型,根据类型及用户左右髋关节的角度值,确定为用户的左右髋关节提供相应的作用力,以通过确定的作用力辅助用户的搬运。本发明提出的方法为需要执行负荷搬运工作的工作者提供了良好的辅助,能够节省使用者搬运物体过程中花费的体力,提高了搬运工作的效率,同时通过增加平衡性令使用者可平稳搬运物体,有效地保障了使用者在搬运过程的人身安全。
技术研发人员:朱瀚琦,王申宝
受保护的技术使用者:深圳市英汉思动力科技有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!